
单孔腹腔微创手术的多自由度柔性机器人用腕部穿线桶.pdf

书生****aa


1/5

2/5

3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

单孔腹腔微创手术的多自由度柔性机器人用腕部穿线桶.pdf
单孔腹腔微创手术的多自由度柔性机器人用腕部穿线桶,它涉及一种微创手术的机器人。它解决了现有的单孔腹腔手术机器人末端结构设计困难,结构复杂、尺寸较大,集成度较低的问题。第一导向轮固定柱的内壁上设有两个第一导向轮,二个第一导向轮沿着第一导向轮固定柱的高度方向上对齐排列,第二导向轮固定柱的内壁上设有一个第二导向轮,第二导向固定柱的侧壁上设有二个第五导向轮,第三导向轮固定柱的内壁上设有两个第三导向轮,第四导向轮固定柱的内壁上设有一个第四导向轮,第四导向轮固定柱的侧壁上设有二个第六导向轮,二个第六导向轮沿着第四导向

一种柔性单孔微创手术机器人.pdf
本发明公开了一种柔性单孔微创手术机器人。该机器人系统包括:多个(编号1至20)柔性单元体、21柔性单元体底座、22顶盘、23导轨、24‑1轴承座、25镍钛合金丝、26螺栓、27‑1丝杆、28‑1丝杆法兰螺母、29‑1法兰螺母座、30螺栓、31‑1轴承座、32、半球壳、33‑1电机、34‑1轴承座支撑架、35‑1联轴器、36底座、多个(编号37至55)弹簧组(每组3个);本发明机器人关节单元包含的两个旋转轴之间的夹角具有可调功能。本发明的机器人关节灵活性好,柔性部分硬度高,运动灵活多变。
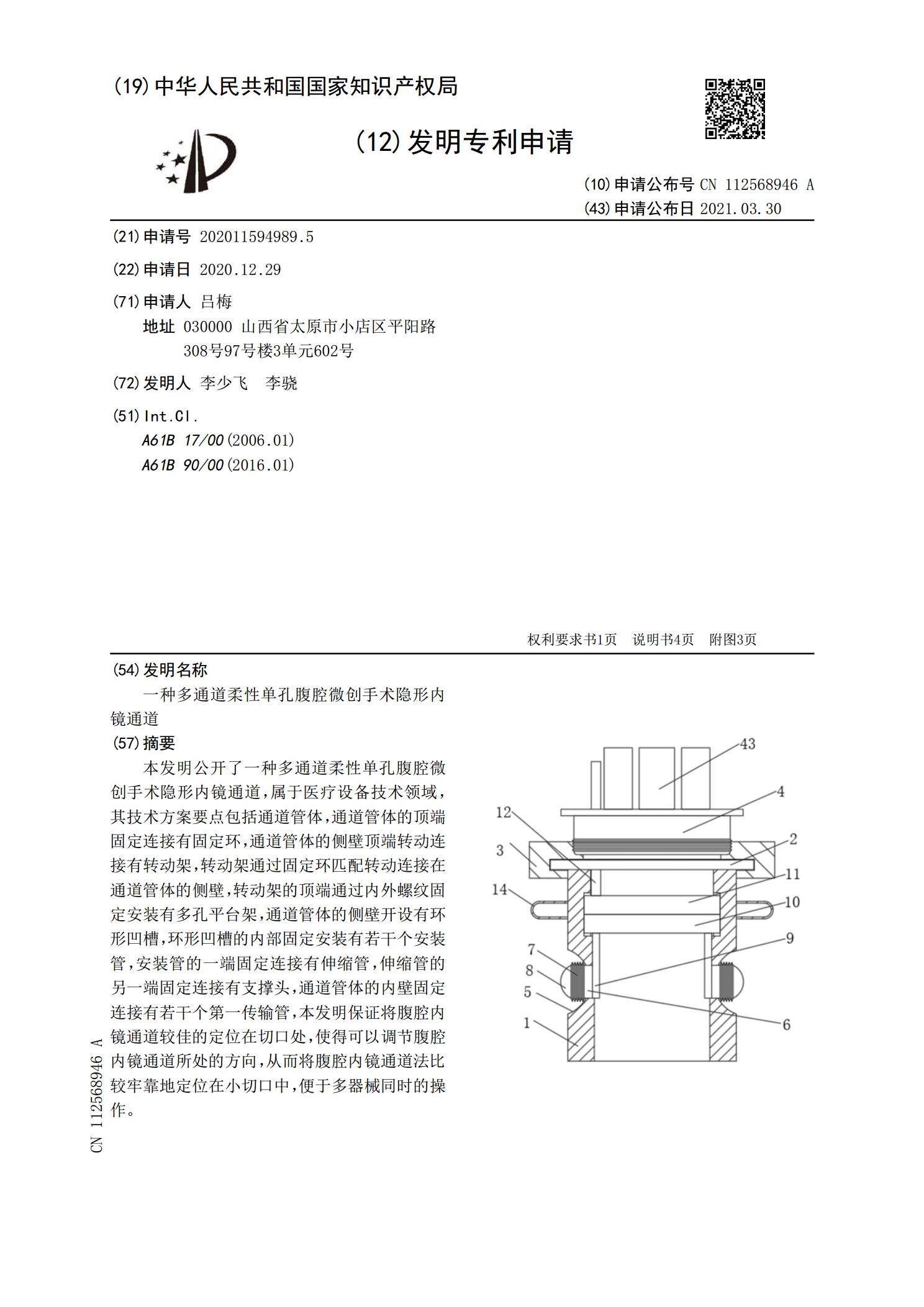
一种多通道柔性单孔腹腔微创手术隐形内镜通道.pdf
本发明公开了一种多通道柔性单孔腹腔微创手术隐形内镜通道,属于医疗设备技术领域,其技术方案要点包括通道管体,通道管体的顶端固定连接有固定环,通道管体的侧壁顶端转动连接有转动架,转动架通过固定环匹配转动连接在通道管体的侧壁,转动架的顶端通过内外螺纹固定安装有多孔平台架,通道管体的侧壁开设有环形凹槽,环形凹槽的内部固定安装有若干个安装管,安装管的一端固定连接有伸缩管,伸缩管的另一端固定连接有支撑头,通道管体的内壁固定连接有若干个第一传输管,本发明保证将腹腔内镜通道较佳的定位在切口处,使得可以调节腹腔内镜通道所处
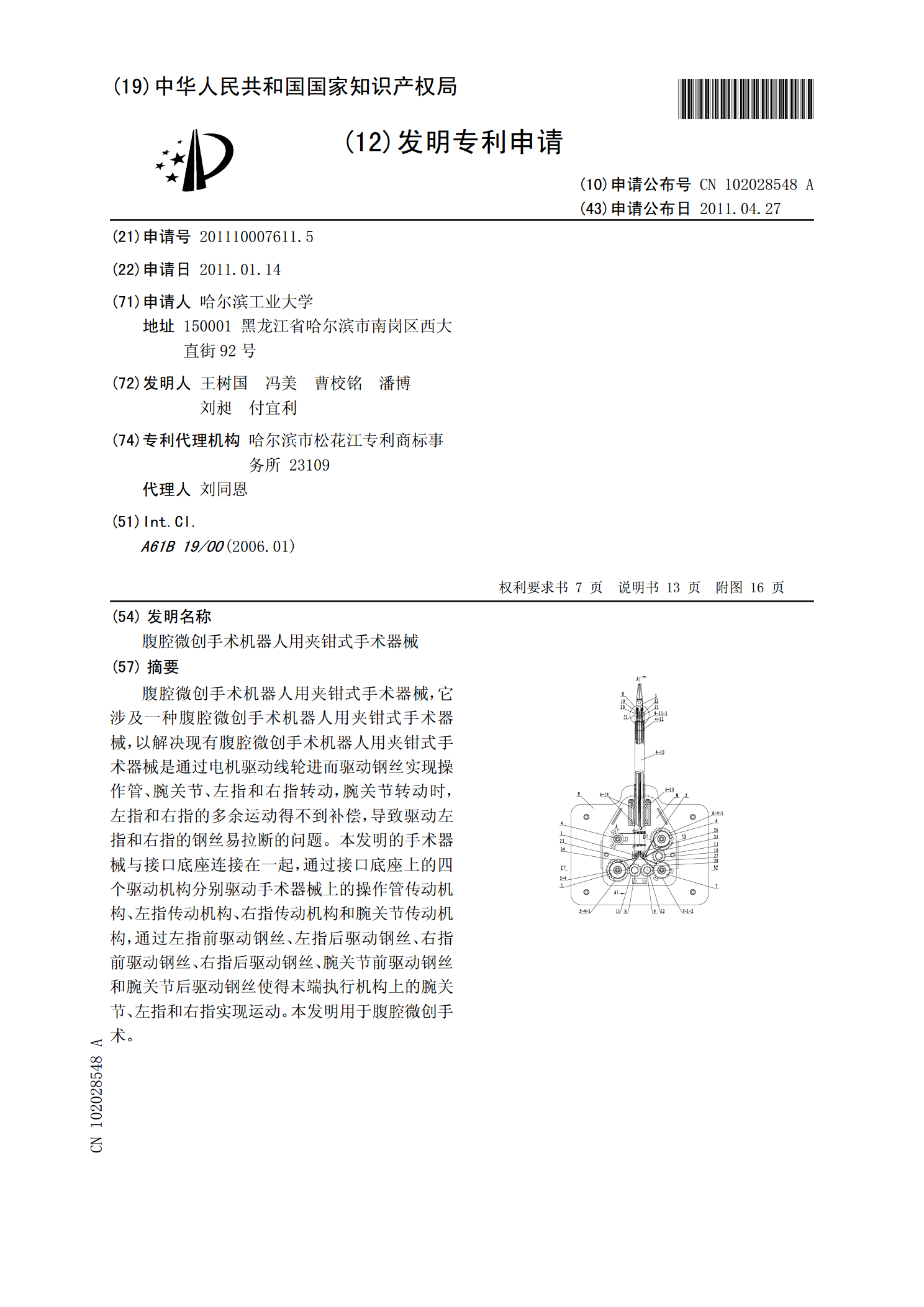
腹腔微创手术机器人用夹钳式手术器械.pdf
腹腔微创手术机器人用夹钳式手术器械,它涉及一种腹腔微创手术机器人用夹钳式手术器械,以解决现有腹腔微创手术机器人用夹钳式手术器械是通过电机驱动线轮进而驱动钢丝实现操作管、腕关节、左指和右指转动,腕关节转动时,左指和右指的多余运动得不到补偿,导致驱动左指和右指的钢丝易拉断的问题。本发明的手术器械与接口底座连接在一起,通过接口底座上的四个驱动机构分别驱动手术器械上的操作管传动机构、左指传动机构、右指传动机构和腕关节传动机构,通过左指前驱动钢丝、左指后驱动钢丝、右指前驱动钢丝、右指后驱动钢丝、腕关节前驱动钢丝和腕

用于腹腔微创手术的视觉机器人.pdf
用于腹腔微创手术的视觉机器人,它涉及一种视觉机器人,以解决现有手持或头戴的视觉手术器械在进行手术时,存在易受医生情绪和疲劳程度影响,智能化程度较低,手术精度和质量差,以及基于机器人技术的智能化视觉手术机器人系统价格昂贵、成本高、灵活性和自由性较差的问题,它包括壳体和清洁基体;它还包括三段轴结构、悬挂支架、电机、曲柄滑块机构、摄像头模块、无线收发模块、中枢控制电路模块、两个永磁铁、两个固定轴和多个LED灯;三段轴结构包括第一传动轴、第二传动轴、第三传动轴、弹簧和方形键;曲柄滑块机构包括驱动轴、曲柄、连杆、滑