
一种用于多轴分布式机电驱动车辆的复合转向辅助系统.pdf

夏萍****文章


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种用于多轴分布式机电驱动车辆的复合转向辅助系统.pdf
本发明公开了一种用于多轴分布式机电驱动车辆的复合转向辅助系统。当驾驶员驾驶车辆进行低速、大转向盘转角的转向运动时,布置在后两桥车轮的驱动电机将提供横摆力矩辅助车辆转向,从而显著减小车辆最小转向半径,提高多轴轮式车辆机动性能。该复合转向辅助系统包括整车控制器、固连在车辆的转向柱上的转向盘转角传感器、针对每个后桥车轮设置的驱动电机及电机控制器,驱动电机经减速器驱动对应的后桥车轮;整车控制器在判定“车速小于设定车速阈值”及“转向盘转角大于设定转向角阈值”同时满足时进入复合转向模式,计算当前转向盘转角与所述转向角
一种基于AMPC的多轴分布式驱动车辆转向辅助轨迹跟踪方法.pdf
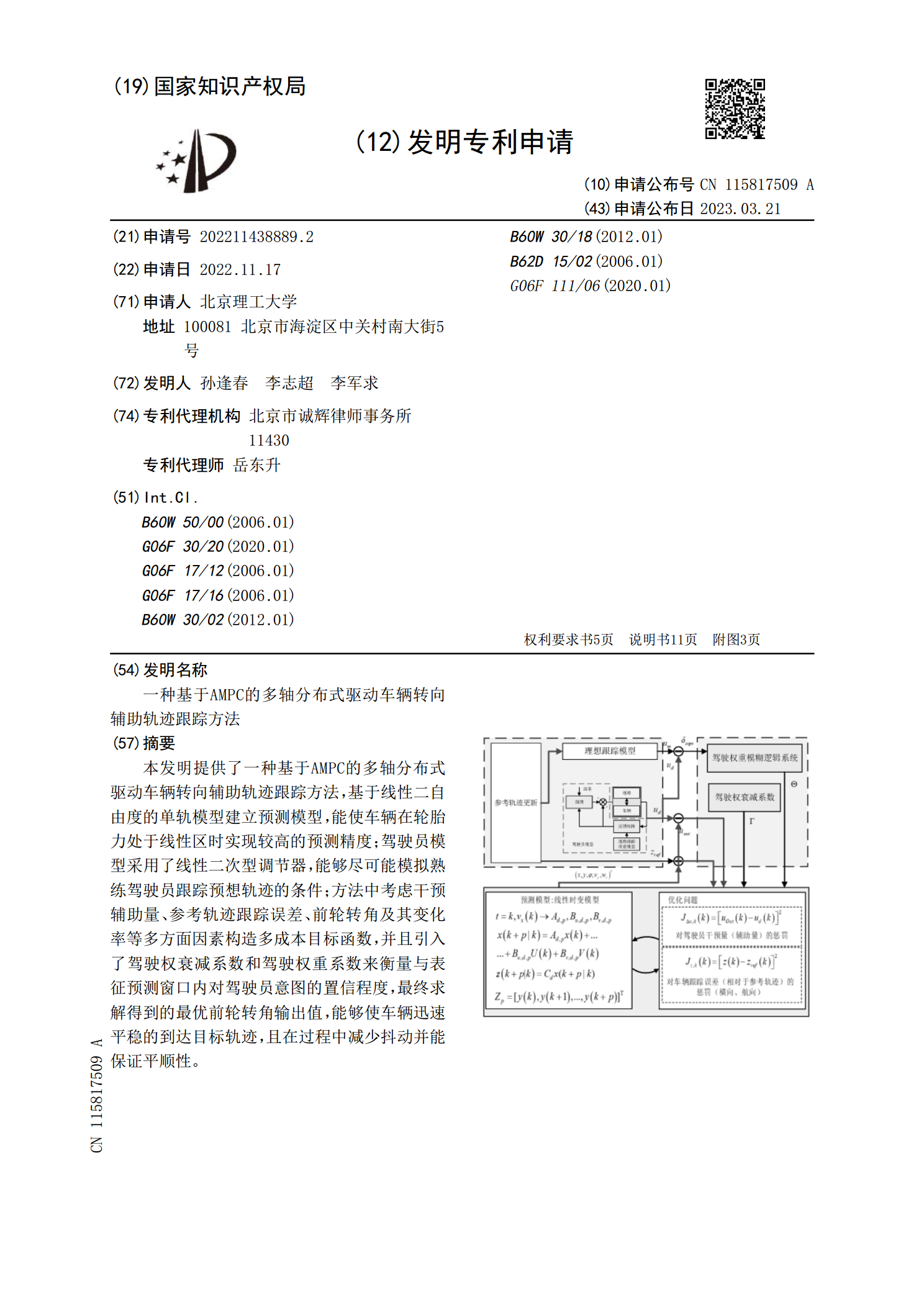
本发明提供了一种基于AMPC的多轴分布式驱动车辆转向辅助轨迹跟踪方法,基于线性二自由度的单轨模型建立预测模型,能使车辆在轮胎力处于线性区时实现较高的预测精度;驾驶员模型采用了线性二次型调节器,能够尽可能模拟熟练驾驶员跟踪预想轨迹的条件;方法中考虑干预辅助量、参考轨迹跟踪误差、前轮转角及其变化率等多方面因素构造多成本目标函数,并且引入了驾驶权衰减系数和驾驶权重系数来衡量与表征预测窗口内对驾驶员意图的置信程度,最终求解得到的最优前轮转角输出值,能够使车辆迅速平稳的到达目标轨迹,且在过程中减少抖动并能保证平顺性
一种用于多轴分布式机电驱动车辆的牵引力控制系统.pdf
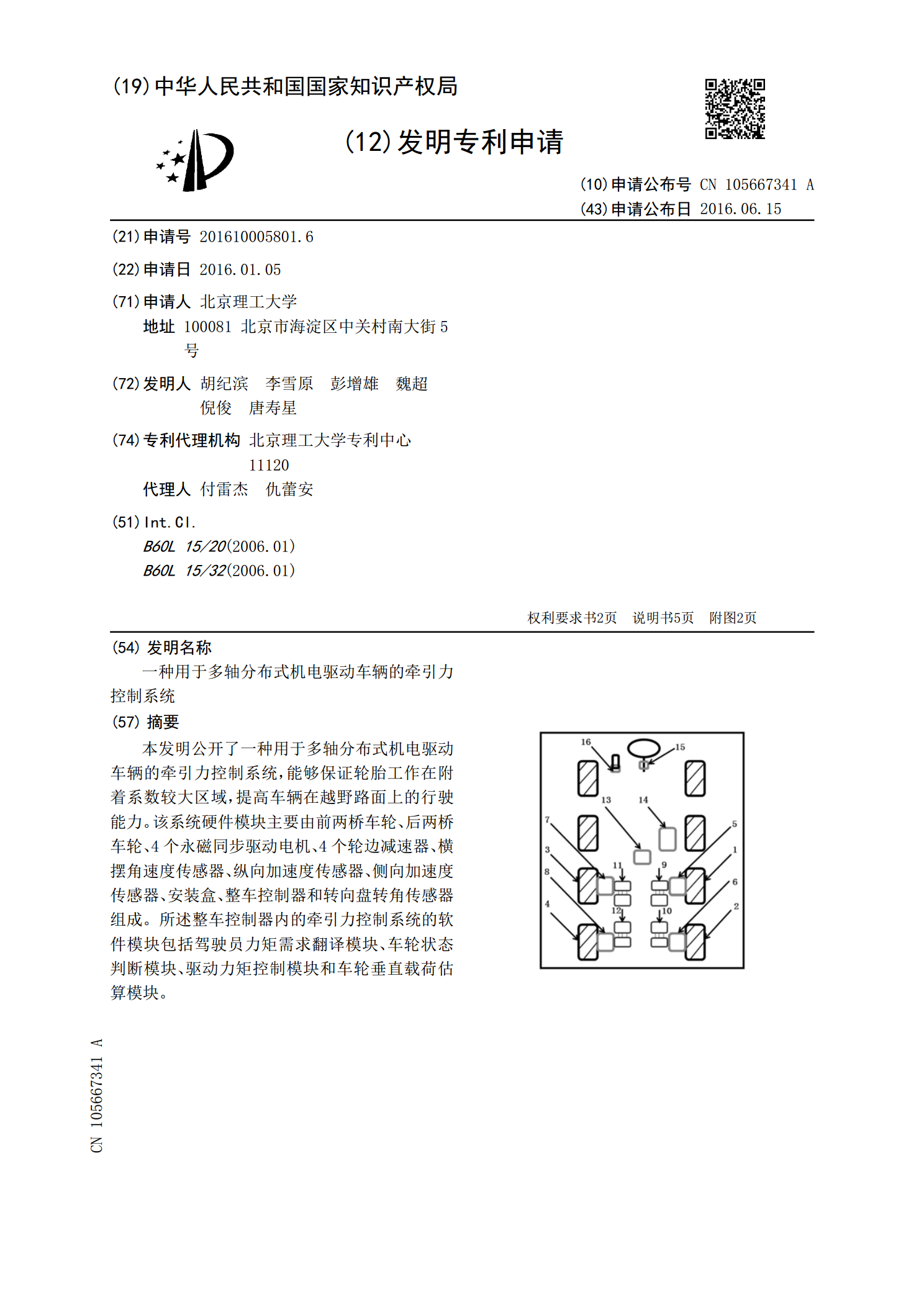
本发明公开了一种用于多轴分布式机电驱动车辆的牵引力控制系统,能够保证轮胎工作在附着系数较大区域,提高车辆在越野路面上的行驶能力。该系统硬件模块主要由前两桥车轮、后两桥车轮、4个永磁同步驱动电机、4个轮边减速器、横摆角速度传感器、纵向加速度传感器、侧向加速度传感器、安装盒、整车控制器和转向盘转角传感器组成。所述整车控制器内的牵引力控制系统的软件模块包括驾驶员力矩需求翻译模块、车轮状态判断模块、驱动力矩控制模块和车轮垂直载荷估算模块。

一种用于多轴分布式机电驱动车辆的操纵稳定性控制系统.pdf
本发明公开了一种用于多轴分布式机电驱动车辆的操纵稳定性控制系统,在由发动机驱动前桥车轮的基础上,采用电驱动后桥车轮,该系统的电驱动部分包括整车控制器、转向盘转角传感器、车体姿态传感器、针对每个后桥车轮设置的轮边驱动电机及其电机控制器;整车控制器在横摆力矩分配算法中,考虑了后桥各电驱动车轮的垂直载荷大小关系,为垂直载荷更大的车轮电机分配更大的电机转矩,从而更好的利用每个车轮的附着能力,提高车辆稳定性裕度;进一步地,目标横摆角速度计算采用了以中性转向为基准的可调模型,当参数A被修改后,车辆所被要求达到的转向特

一种多轴驱动车辆机电复合制动系统及制动方法.pdf
本发明公开一种多轴驱动车辆机电复合制动系统及制动方法,包括:制动子系统、整车主控制器和整车动力线;整车主控制器通过整车动力线与制动子系统连接;制动子系统包括:动力电池、高压控制箱、辅助制动单元、电机制动单元;动力电池、辅助制动单元、电机制动单元分别与高压控制箱连接,电机制动单元制动车辆车轮。本发明优化动力电池的充电区间,既合理利用了电机回馈制动能量又对电池进行了很好的保护;配置智能APU辅助制动单元,充分利用了电机的再生制动能量,从而更好的保护了机械制动单元。