
一种基于AMPC的多轴分布式驱动车辆转向辅助轨迹跟踪方法.pdf

St****36


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于AMPC的多轴分布式驱动车辆转向辅助轨迹跟踪方法.pdf
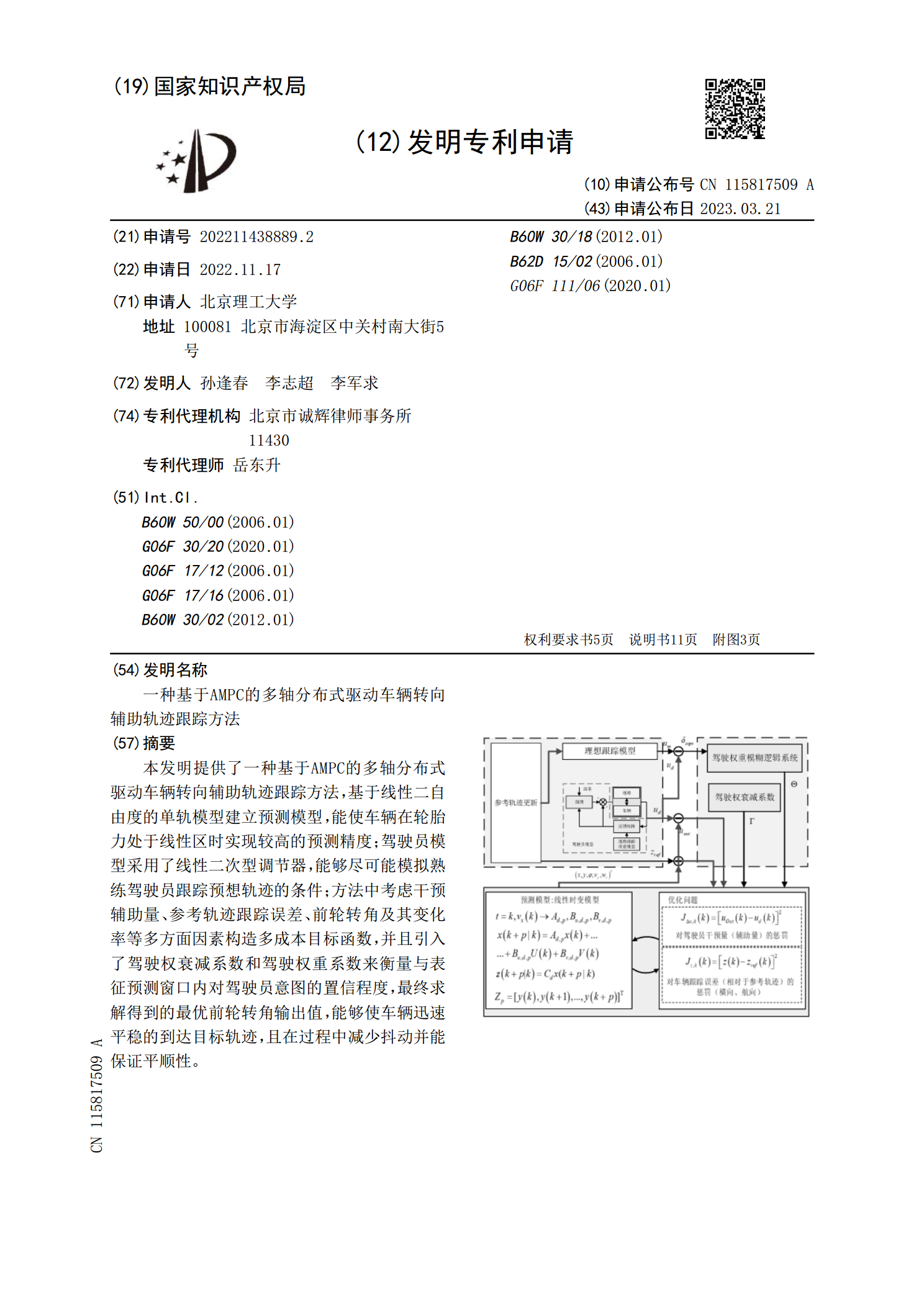
本发明提供了一种基于AMPC的多轴分布式驱动车辆转向辅助轨迹跟踪方法,基于线性二自由度的单轨模型建立预测模型,能使车辆在轮胎力处于线性区时实现较高的预测精度;驾驶员模型采用了线性二次型调节器,能够尽可能模拟熟练驾驶员跟踪预想轨迹的条件;方法中考虑干预辅助量、参考轨迹跟踪误差、前轮转角及其变化率等多方面因素构造多成本目标函数,并且引入了驾驶权衰减系数和驾驶权重系数来衡量与表征预测窗口内对驾驶员意图的置信程度,最终求解得到的最优前轮转角输出值,能够使车辆迅速平稳的到达目标轨迹,且在过程中减少抖动并能保证平顺性

一种用于多轴分布式机电驱动车辆的复合转向辅助系统.pdf
本发明公开了一种用于多轴分布式机电驱动车辆的复合转向辅助系统。当驾驶员驾驶车辆进行低速、大转向盘转角的转向运动时,布置在后两桥车轮的驱动电机将提供横摆力矩辅助车辆转向,从而显著减小车辆最小转向半径,提高多轴轮式车辆机动性能。该复合转向辅助系统包括整车控制器、固连在车辆的转向柱上的转向盘转角传感器、针对每个后桥车轮设置的驱动电机及电机控制器,驱动电机经减速器驱动对应的后桥车轮;整车控制器在判定“车速小于设定车速阈值”及“转向盘转角大于设定转向角阈值”同时满足时进入复合转向模式,计算当前转向盘转角与所述转向角
轮边/轮毂驱动多轴车辆的转向方法.pdf
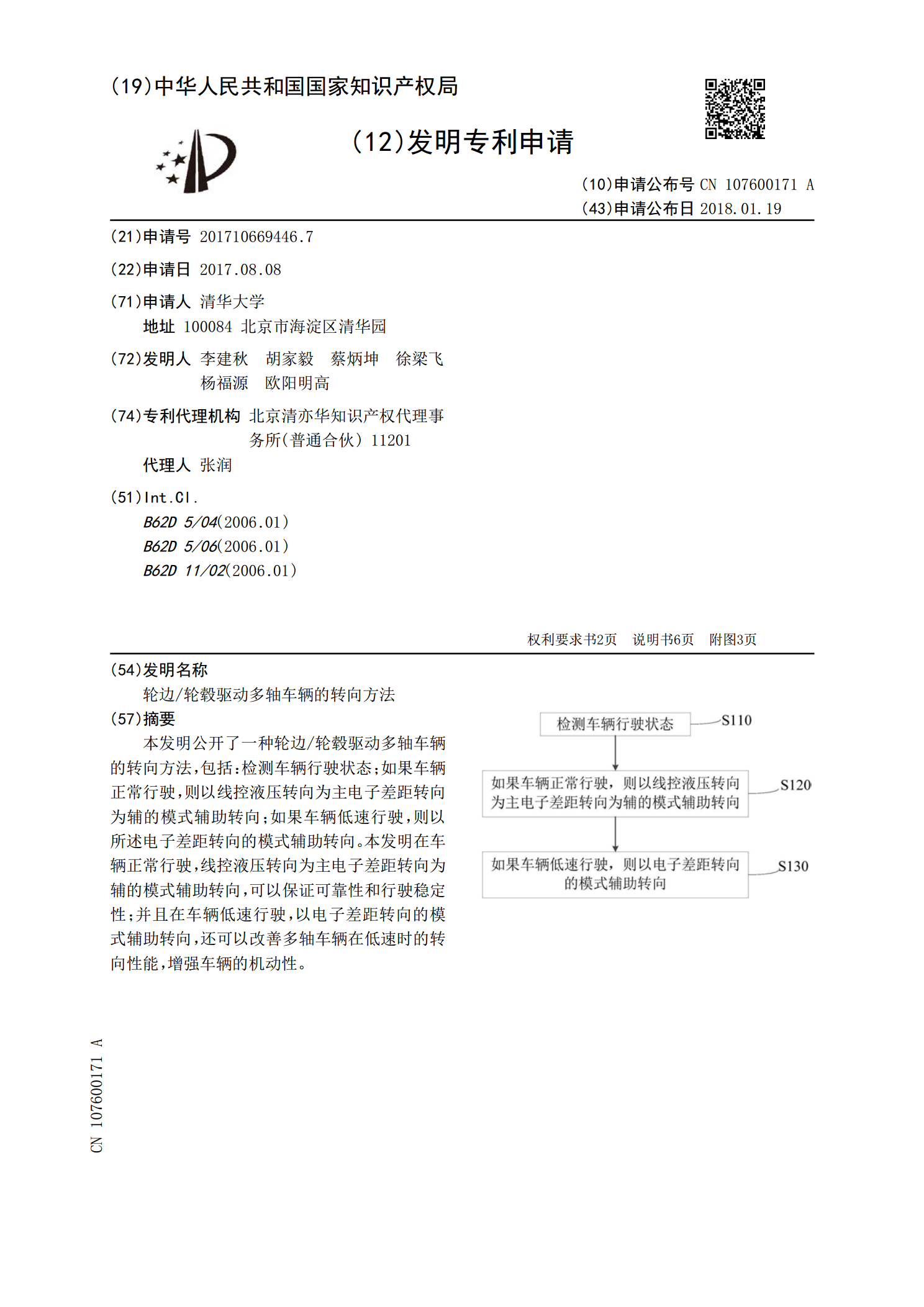
本发明公开了一种轮边/轮毂驱动多轴车辆的转向方法,包括:检测车辆行驶状态;如果车辆正常行驶,则以线控液压转向为主电子差距转向为辅的模式辅助转向;如果车辆低速行驶,则以所述电子差距转向的模式辅助转向。本发明在车辆正常行驶,线控液压转向为主电子差距转向为辅的模式辅助转向,可以保证可靠性和行驶稳定性;并且在车辆低速行驶,以电子差距转向的模式辅助转向,还可以改善多轴车辆在低速时的转向性能,增强车辆的机动性。
一种多轴轮毂电机驱动车辆后轮线控转向驱动装置及其转向方法.pdf
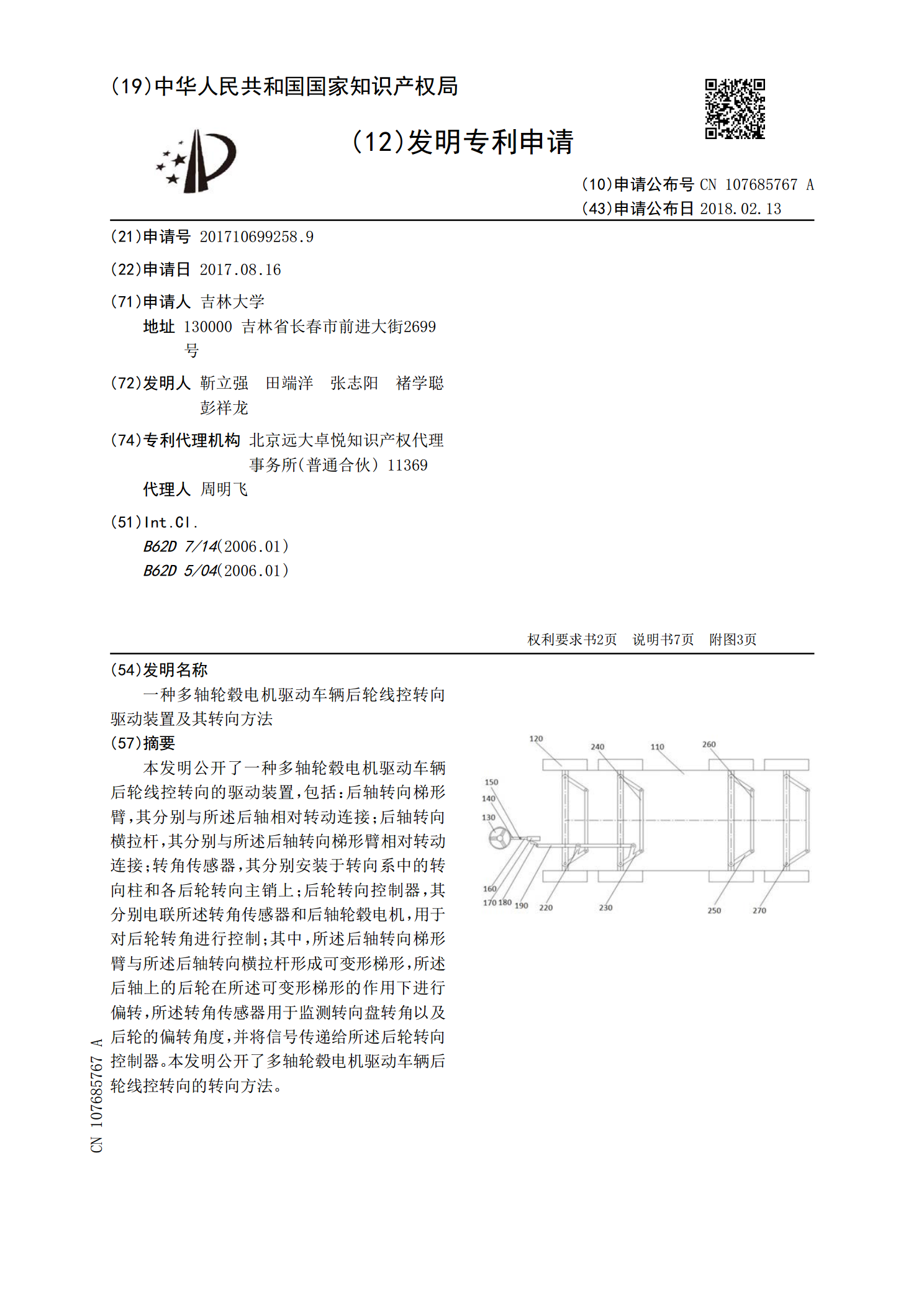
本发明公开了一种多轴轮毂电机驱动车辆后轮线控转向的驱动装置,包括:后轴转向梯形臂,其分别与所述后轴相对转动连接;后轴转向横拉杆,其分别与所述后轴转向梯形臂相对转动连接;转角传感器,其分别安装于转向系中的转向柱和各后轮转向主销上;后轮转向控制器,其分别电联所述转角传感器和后轴轮毂电机,用于对后轮转角进行控制;其中,所述后轴转向梯形臂与所述后轴转向横拉杆形成可变形梯形,所述后轴上的后轮在所述可变形梯形的作用下进行偏转,所述转角传感器用于监测转向盘转角以及后轮的偏转角度,并将信号传递给所述后轮转向控制器。本发明

基于差动和自主转向协调的分布式驱动无人车轨迹跟踪.docx
基于差动和自主转向协调的分布式驱动无人车轨迹跟踪随着无人驾驶技术的不断发展,越来越多的研究和实践证明分布式驱动技术可以提高无人车的安全性和可靠性,并且可以更好地应对复杂道路环境。然而,由于无人车的复杂性和高度自主化,轨迹跟踪一直是无人车技术中的一个难点问题。本文将探讨如何基于差动和自主转向协调的分布式驱动无人车轨迹跟踪技术。1.无人车轨迹跟踪技术的瓶颈及其解决方法轨迹跟踪作为无人车控制的重要组成部分,是实现精准驾驶和避免碰撞的关键。现有技术主要包括模型预测控制(MPC)、比例积分微分控制(PID)和反馈控