
一种用于多轴分布式机电驱动车辆的牵引力控制系统.pdf

雨巷****碧易


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种用于多轴分布式机电驱动车辆的牵引力控制系统.pdf
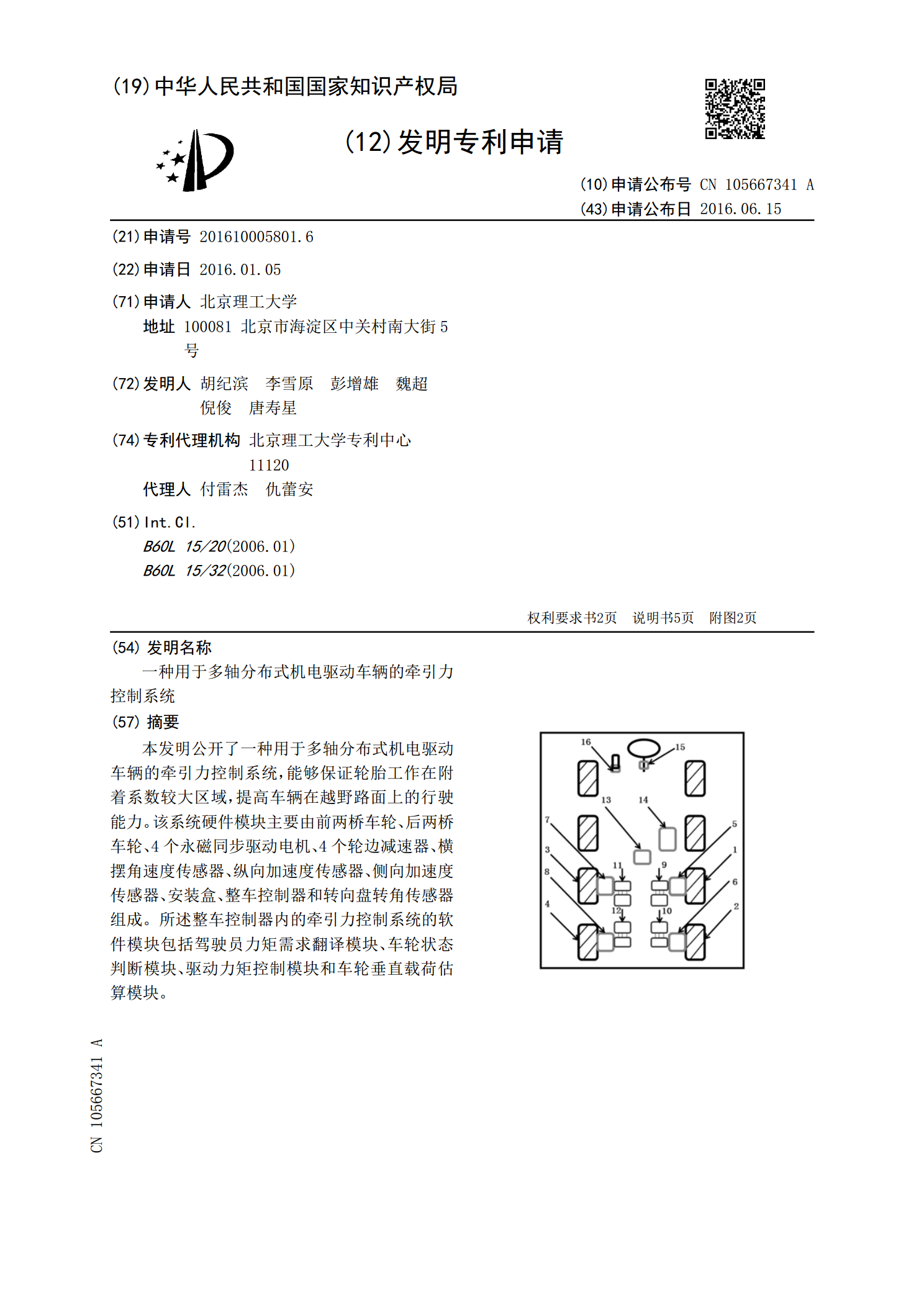
本发明公开了一种用于多轴分布式机电驱动车辆的牵引力控制系统,能够保证轮胎工作在附着系数较大区域,提高车辆在越野路面上的行驶能力。该系统硬件模块主要由前两桥车轮、后两桥车轮、4个永磁同步驱动电机、4个轮边减速器、横摆角速度传感器、纵向加速度传感器、侧向加速度传感器、安装盒、整车控制器和转向盘转角传感器组成。所述整车控制器内的牵引力控制系统的软件模块包括驾驶员力矩需求翻译模块、车轮状态判断模块、驱动力矩控制模块和车轮垂直载荷估算模块。

一种用于多轴分布式机电驱动车辆的操纵稳定性控制系统.pdf
本发明公开了一种用于多轴分布式机电驱动车辆的操纵稳定性控制系统,在由发动机驱动前桥车轮的基础上,采用电驱动后桥车轮,该系统的电驱动部分包括整车控制器、转向盘转角传感器、车体姿态传感器、针对每个后桥车轮设置的轮边驱动电机及其电机控制器;整车控制器在横摆力矩分配算法中,考虑了后桥各电驱动车轮的垂直载荷大小关系,为垂直载荷更大的车轮电机分配更大的电机转矩,从而更好的利用每个车轮的附着能力,提高车辆稳定性裕度;进一步地,目标横摆角速度计算采用了以中性转向为基准的可调模型,当参数A被修改后,车辆所被要求达到的转向特

一种用于多轴分布式机电驱动车辆的复合转向辅助系统.pdf
本发明公开了一种用于多轴分布式机电驱动车辆的复合转向辅助系统。当驾驶员驾驶车辆进行低速、大转向盘转角的转向运动时,布置在后两桥车轮的驱动电机将提供横摆力矩辅助车辆转向,从而显著减小车辆最小转向半径,提高多轴轮式车辆机动性能。该复合转向辅助系统包括整车控制器、固连在车辆的转向柱上的转向盘转角传感器、针对每个后桥车轮设置的驱动电机及电机控制器,驱动电机经减速器驱动对应的后桥车轮;整车控制器在判定“车速小于设定车速阈值”及“转向盘转角大于设定转向角阈值”同时满足时进入复合转向模式,计算当前转向盘转角与所述转向角

用于多轴分布式机电驱动车辆的动力学稳定性控制系统.pdf
本发明属于车辆动力学稳定性控制系统领域,针对8×8多轴分布式机电驱动车辆,具体公开了一种用于多轴分布式机电驱动车辆的动力学稳定性控制系统。该系统包括硬件和软件两个模块,其中硬件主要由4个轮边驱动电机、4个电机控制器、横摆角速度传感器、纵向加速度传感器、侧向加速度传感器、整车控制器构成;该系统的软件模包括:质心侧偏角计算模块、车辆失稳判断模块和横摆力矩辅助模块;能够不同车速下车辆动力学稳定性要求,填补了8×8多轴分布式驱动车辆动力学稳定性控制系统的空白。

一种多轴驱动分布式车辆的车轮扭矩分配方法.pdf
本发明提出了一种多轴驱动分布式车辆的车轮扭矩分配方法,本发明通过将上层控制器的车辆纵向力与车辆横摆力矩指令转化为车轮解析纵向扭矩和与车轮解析转向扭矩差,并将车轮的扭矩分配分为左右分配与前后分配两个阶段;左右分配时将一侧车轮视为一个整体,采用转向优先的原则;前后分配采用考虑不同车轮限值下的平均分配的方式,使同侧车轮扭矩负担相近,同侧车轮之间扭矩相互补偿,准确实现同侧车轮扭矩和的分配。本发明将复杂的多轴车轮扭矩分配问题分解为较少车轮的扭矩分配问题,降低了车轮扭矩分配的复杂度,保证车辆的动力性和转向稳定性,以及