
利用夹角几何关系的超短基线定位方法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

利用夹角几何关系的超短基线定位方法.docx
利用夹角几何关系的超短基线定位方法摘要:超短基线定位方法是实现无人机航拍、移动互联网与各种应用程序等技术领域中定位的重要手段,利用夹角几何关系解算出定位坐标,具有简便快捷、低成本、精度高等优点。本文详细介绍了超短基线定位方法的原理、步骤,并通过实验验证了该方法的可行性与精度。关键词:超短基线定位、夹角几何关系、无人机、定位精度一、概述随着移动通信网络和无人机的发展,定位在各个领域中日益重要。超短基线定位方法是利用夹角几何关系,通过无人机航拍等手段解算出定位坐标,具有精度高、成本低等优点,已经被广泛应用于电
一种方形超短基线定位方法.pdf
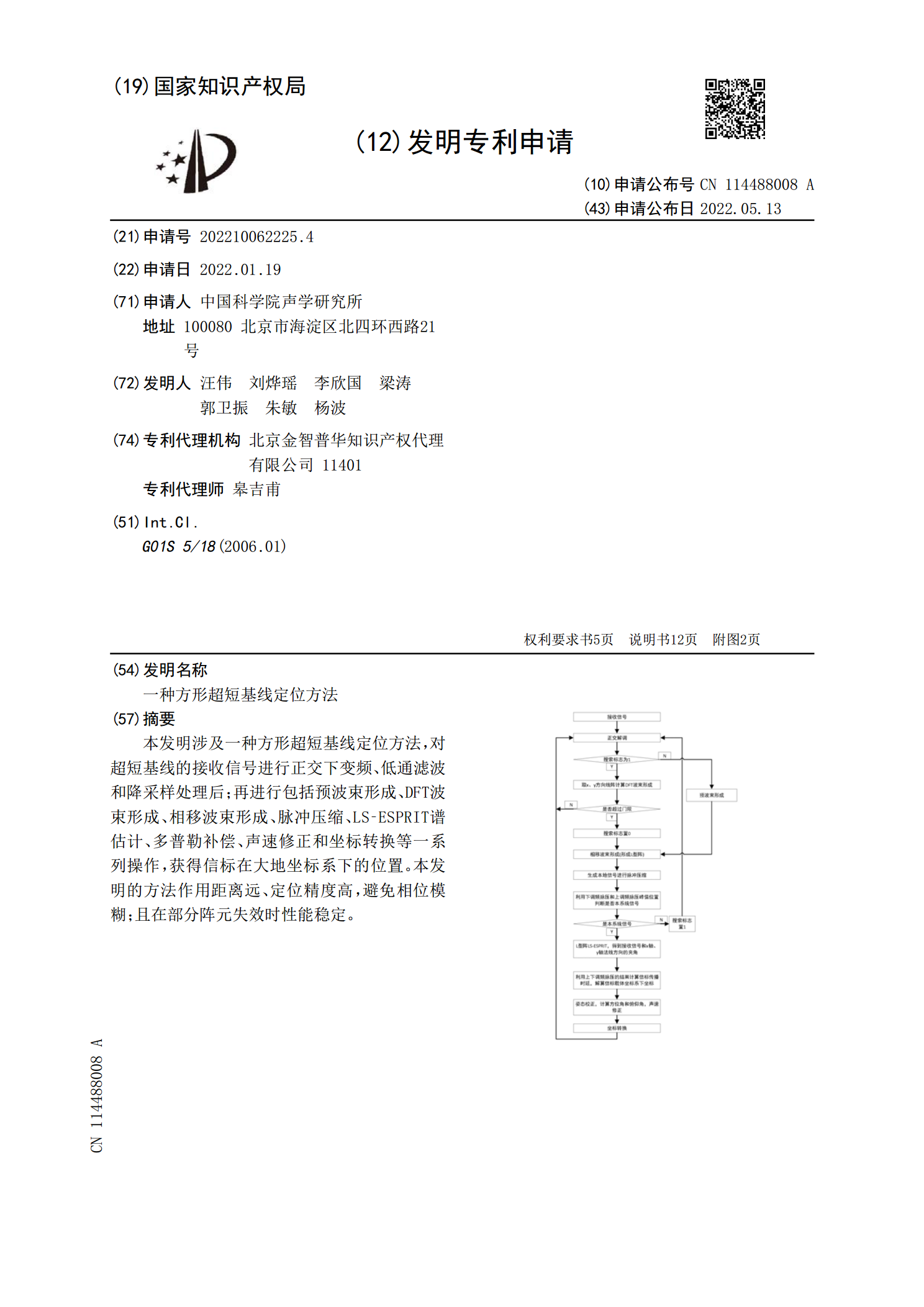
本发明涉及一种方形超短基线定位方法,对超短基线的接收信号进行正交下变频、低通滤波和降采样处理后;再进行包括预波束形成、DFT波束形成、相移波束形成、脉冲压缩、LS‑ESPRIT谱估计、多普勒补偿、声速修正和坐标转换等一系列操作,获得信标在大地坐标系下的位置。本发明的方法作用距离远、定位精度高,避免相位模糊;且在部分阵元失效时性能稳定。

基于超短基线定位的AUV对接导航方法研究.docx
基于超短基线定位的AUV对接导航方法研究基于超短基线定位的AUV对接导航方法研究摘要:随着水下无人机(AUV)的广泛使用,对其高精度对接导航方法的需求也越来越迫切。本文针对AUV对接导航问题,提出了一种基于超短基线定位的方法。该方法通过利用超短基线定位系统对AUV进行位置和姿态估计,从而实现对接导航控制。实验证明,该方法能够有效提高AUV的对接精度和稳定性,具有较好的应用前景。1.引言水下无人机(AUV)广泛应用于海洋勘探、海洋科学研究等领域。而在实际应用中,AUV需要实现对接任务,例如对接到潜望镜、固定

基于超短基线水声定位的USVUUV协同导航方法.docx
基于超短基线水声定位的USVUUV协同导航方法基于超短基线水声定位的USV/UUV协同导航方法摘要:随着无人水面舰船(USV)和无人水下航行器(UUV)的发展,USV/UUV协同导航成为了一个研究热点。本文针对这一问题,提出了一种基于超短基线水声定位的USV/UUV协同导航方法。该方法利用水声信号进行定位,通过多传感器融合实现USV/UUV位置信息的融合和精确定位,进而实现协同导航。关键词:超短基线水声定位、USV/UUV协同导航、多传感器融合1.引言随着科技的发展,无人水面舰船(USV)和无人水下航行器
一种新型超短基线定位系统和方法.pdf
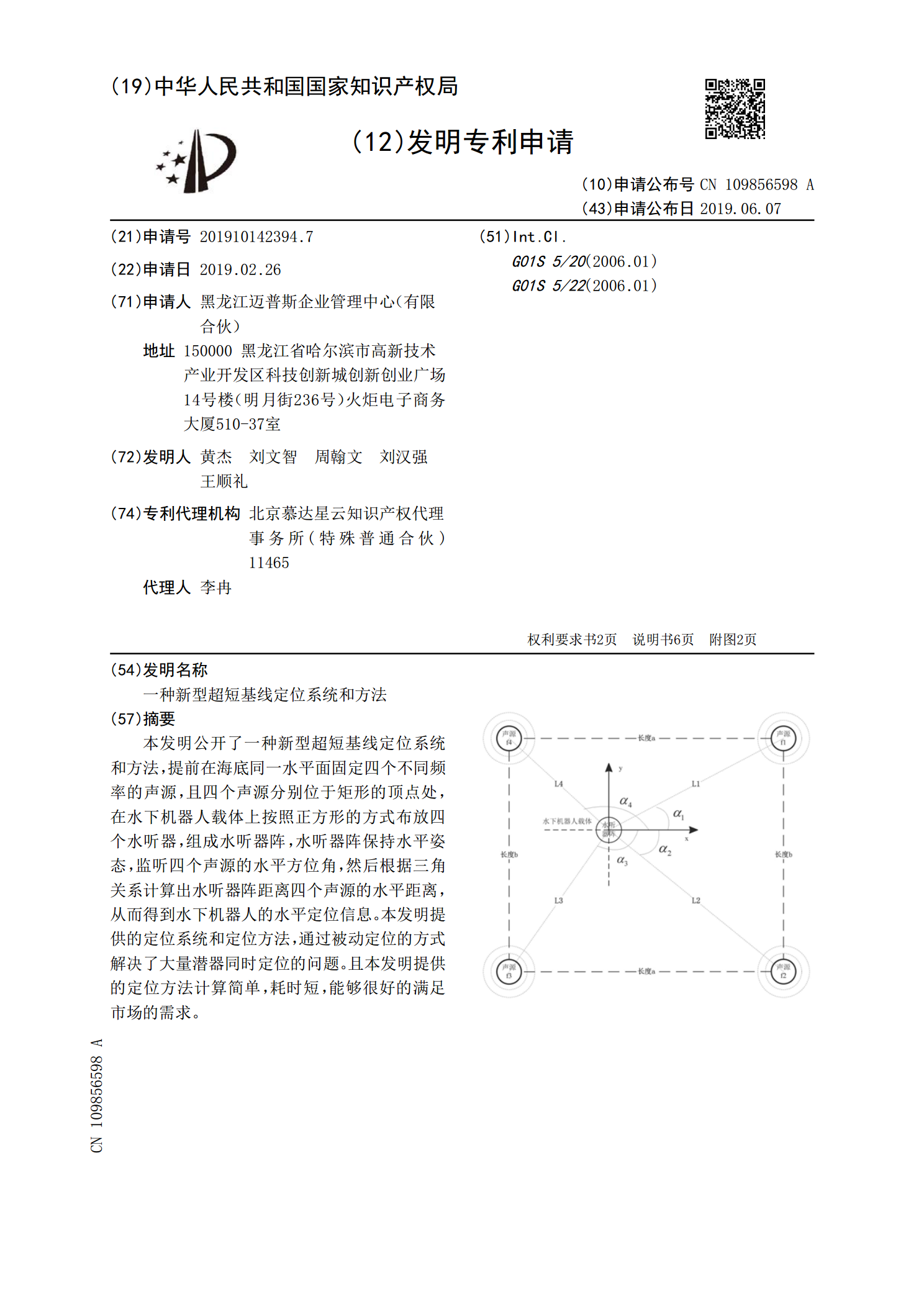
本发明公开了一种新型超短基线定位系统和方法,提前在海底同一水平面固定四个不同频率的声源,且四个声源分别位于矩形的顶点处,在水下机器人载体上按照正方形的方式布放四个水听器,组成水听器阵,水听器阵保持水平姿态,监听四个声源的水平方位角,然后根据三角关系计算出水听器阵距离四个声源的水平距离,从而得到水下机器人的水平定位信息。本发明提供的定位系统和定位方法,通过被动定位的方式解决了大量潜器同时定位的问题。且本发明提供的定位方法计算简单,耗时短,能够很好的满足市场的需求。