
基于超短基线定位的AUV对接导航方法研究.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于超短基线定位的AUV对接导航方法研究.docx
基于超短基线定位的AUV对接导航方法研究基于超短基线定位的AUV对接导航方法研究摘要:随着水下无人机(AUV)的广泛使用,对其高精度对接导航方法的需求也越来越迫切。本文针对AUV对接导航问题,提出了一种基于超短基线定位的方法。该方法通过利用超短基线定位系统对AUV进行位置和姿态估计,从而实现对接导航控制。实验证明,该方法能够有效提高AUV的对接精度和稳定性,具有较好的应用前景。1.引言水下无人机(AUV)广泛应用于海洋勘探、海洋科学研究等领域。而在实际应用中,AUV需要实现对接任务,例如对接到潜望镜、固定

基于超短基线水声定位的USVUUV协同导航方法.docx
基于超短基线水声定位的USVUUV协同导航方法基于超短基线水声定位的USV/UUV协同导航方法摘要:随着无人水面舰船(USV)和无人水下航行器(UUV)的发展,USV/UUV协同导航成为了一个研究热点。本文针对这一问题,提出了一种基于超短基线水声定位的USV/UUV协同导航方法。该方法利用水声信号进行定位,通过多传感器融合实现USV/UUV位置信息的融合和精确定位,进而实现协同导航。关键词:超短基线水声定位、USV/UUV协同导航、多传感器融合1.引言随着科技的发展,无人水面舰船(USV)和无人水下航行器

基于同时定位与地图构建的AUV导航定位方法综述.docx
基于同时定位与地图构建的AUV导航定位方法综述基于同时定位与地图构建的AutonomousUnderwaterVehicle(AUV)导航定位方法综述摘要:自主水下机器人(AUV)在水下任务中起到重要的作用,然而在水下环境中进行准确定位和导航仍然是一个具有挑战的任务。目前,同时定位与地图构建(SLAM)技术被广泛应用于AUV的导航和定位。本文对基于SLAM的AUV导航定位方法进行综述,并讨论了各种常用的SLAM算法及其在AUV导航中的应用。关键词:自主水下机器人、同时定位与地图构建、导航、定位、SLAM算

超短基线定位技术在水下潜器对接中的应用研究的中期报告.docx
超短基线定位技术在水下潜器对接中的应用研究的中期报告引言水下潜器对接是水下作业中的一项关键技术,对于深海勘探、管线铺设等领域都有着重要的应用价值。其中定位技术是水下潜器对接的核心技术之一。传统的定位技术主要是采用GPS导航技术,但是由于GPS信号在水中无法传递,因此无法满足水下潜器对接的需求。随着科技的不断发展,超短基线定位技术应运而生,成为了水下潜器对接中的主流技术。本文旨在探究超短基线定位技术在水下潜器对接中的应用研究,并对该技术的优势和不足之处进行分析。超短基线定位技术的原理与特点超短基线定位技术是
一种基于逆超短基线的圆柱阵定位系统及定位方法.pdf
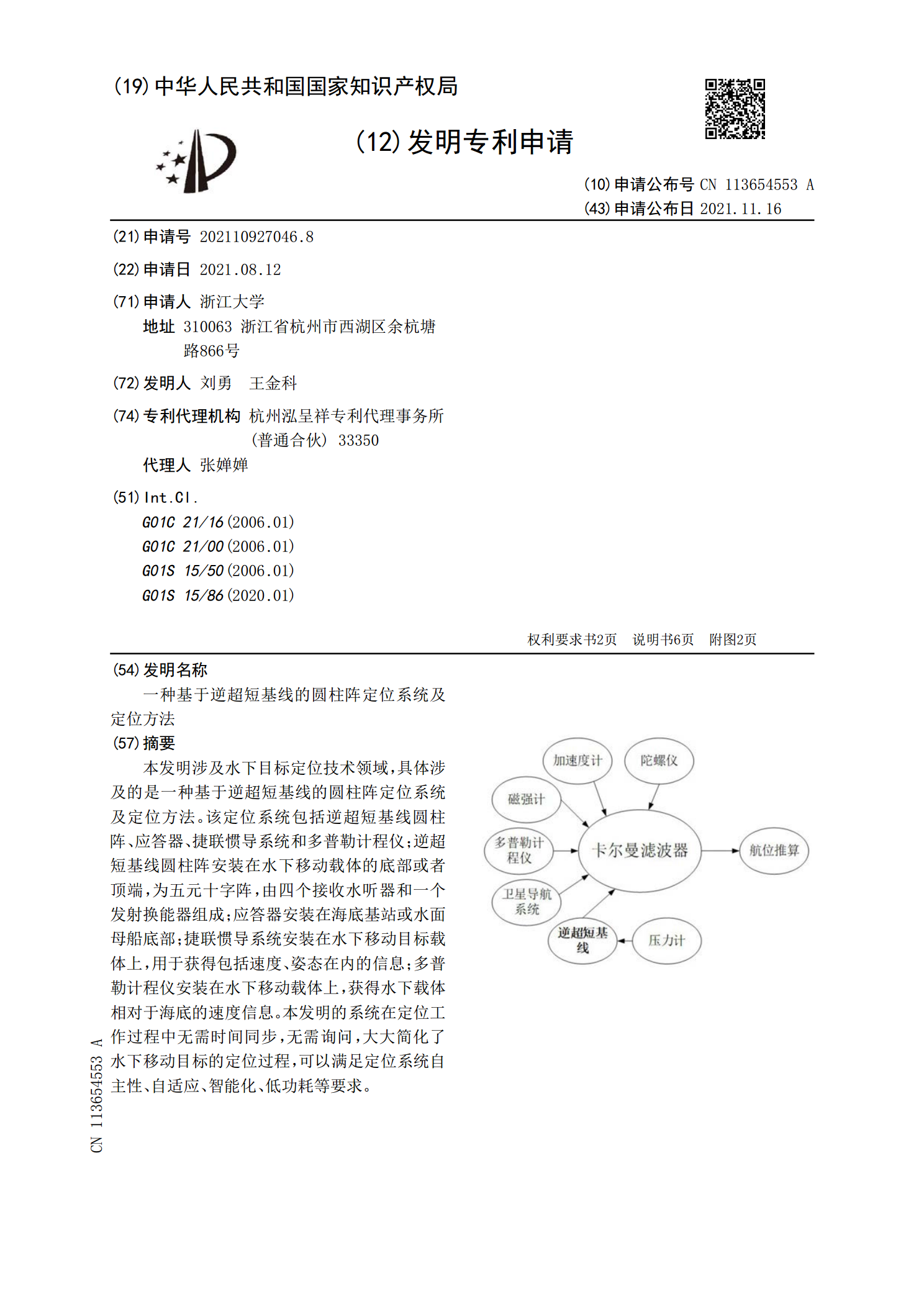
本发明涉及水下目标定位技术领域,具体涉及的是一种基于逆超短基线的圆柱阵定位系统及定位方法。该定位系统包括逆超短基线圆柱阵、应答器、捷联惯导系统和多普勒计程仪;逆超短基线圆柱阵安装在水下移动载体的底部或者顶端,为五元十字阵,由四个接收水听器和一个发射换能器组成;应答器安装在海底基站或水面母船底部;捷联惯导系统安装在水下移动目标载体上,用于获得包括速度、姿态在内的信息;多普勒计程仪安装在水下移动载体上,获得水下载体相对于海底的速度信息。本发明的系统在定位工作过程中无需时间同步,无需询问,大大简化了水下移动目标