
一种方形超短基线定位方法.pdf

是你****深呀

1/10

2/10
3/10
4/10

5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种方形超短基线定位方法.pdf
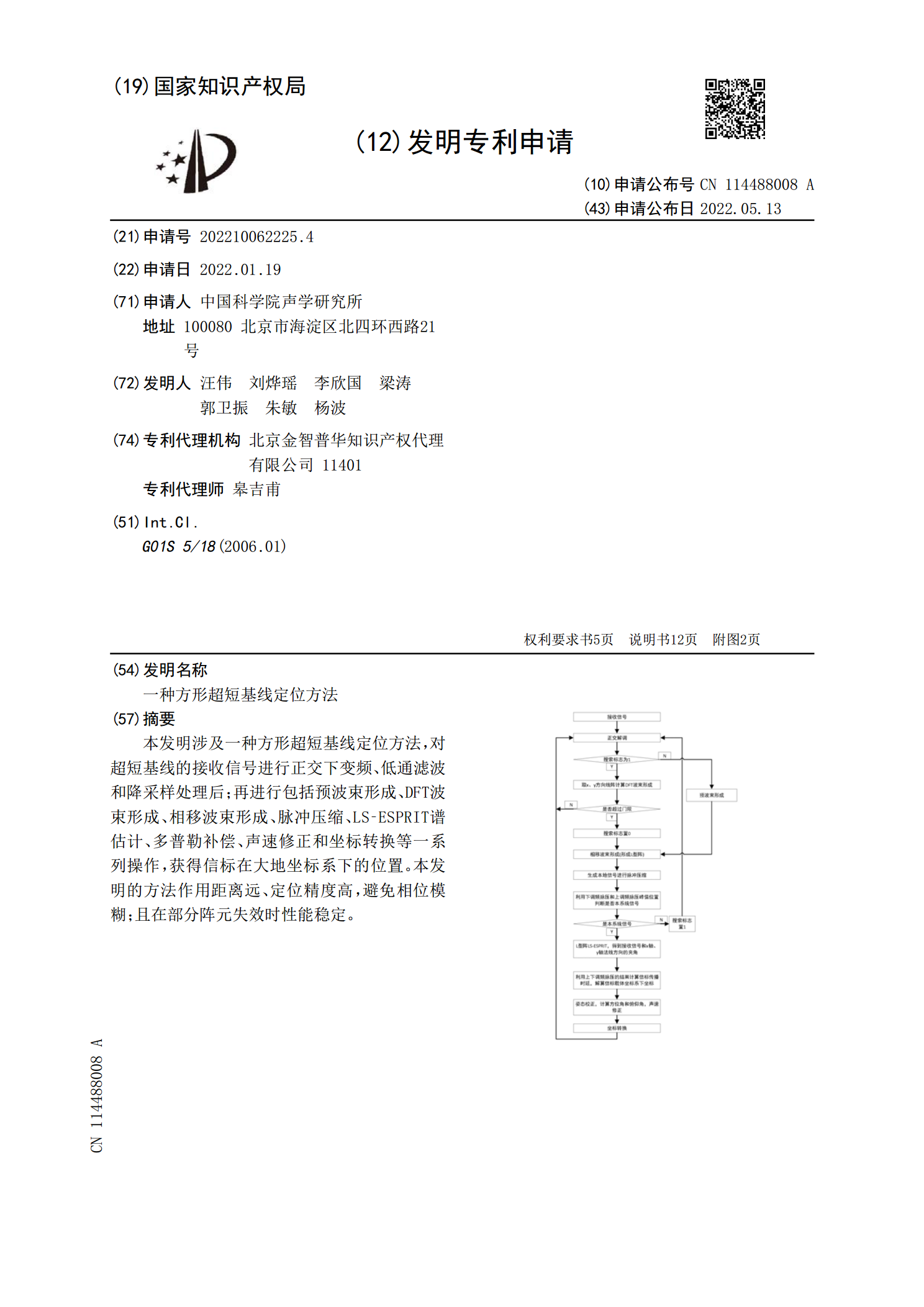
本发明涉及一种方形超短基线定位方法,对超短基线的接收信号进行正交下变频、低通滤波和降采样处理后;再进行包括预波束形成、DFT波束形成、相移波束形成、脉冲压缩、LS‑ESPRIT谱估计、多普勒补偿、声速修正和坐标转换等一系列操作,获得信标在大地坐标系下的位置。本发明的方法作用距离远、定位精度高,避免相位模糊;且在部分阵元失效时性能稳定。
一种新型超短基线定位系统和方法.pdf
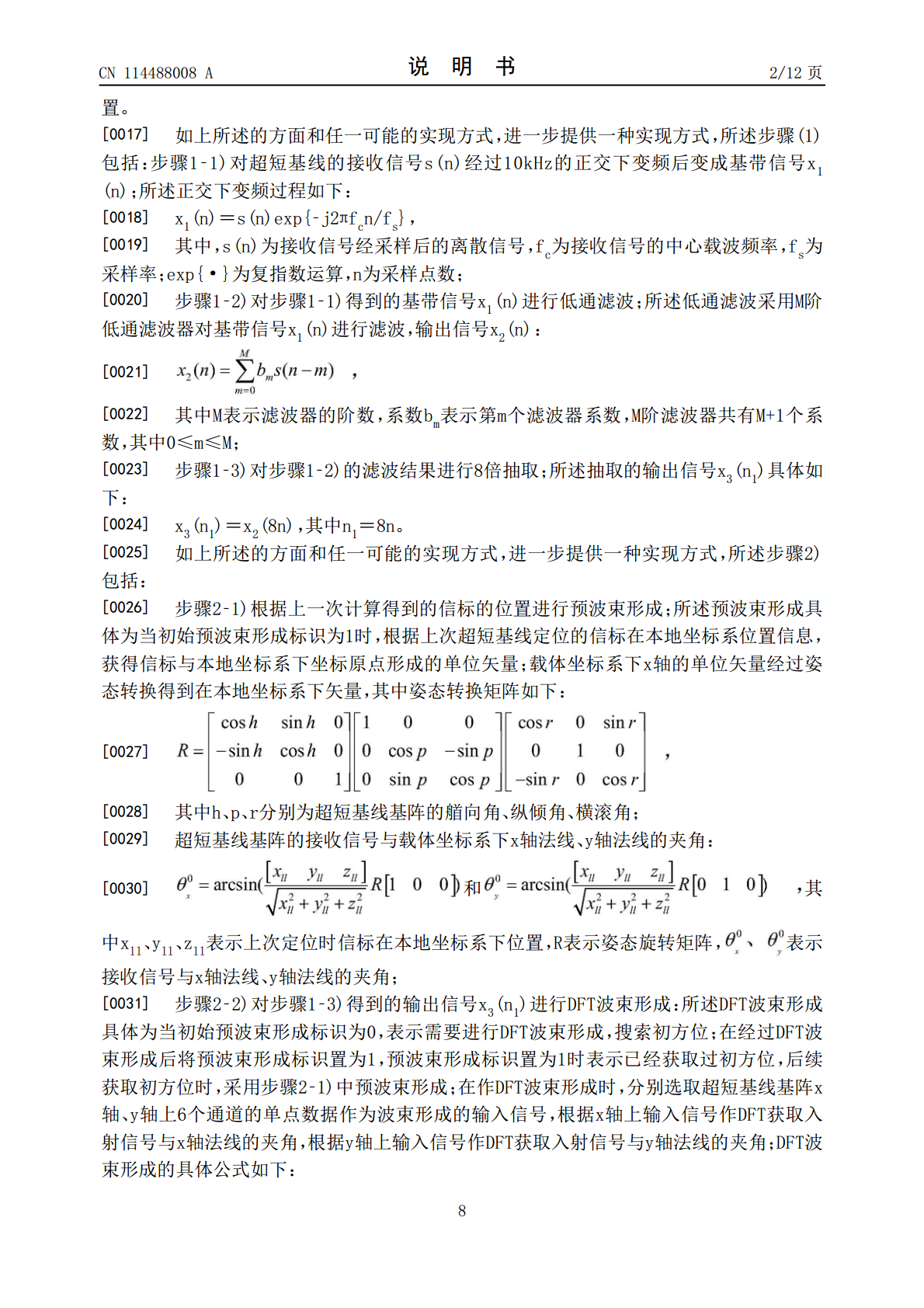
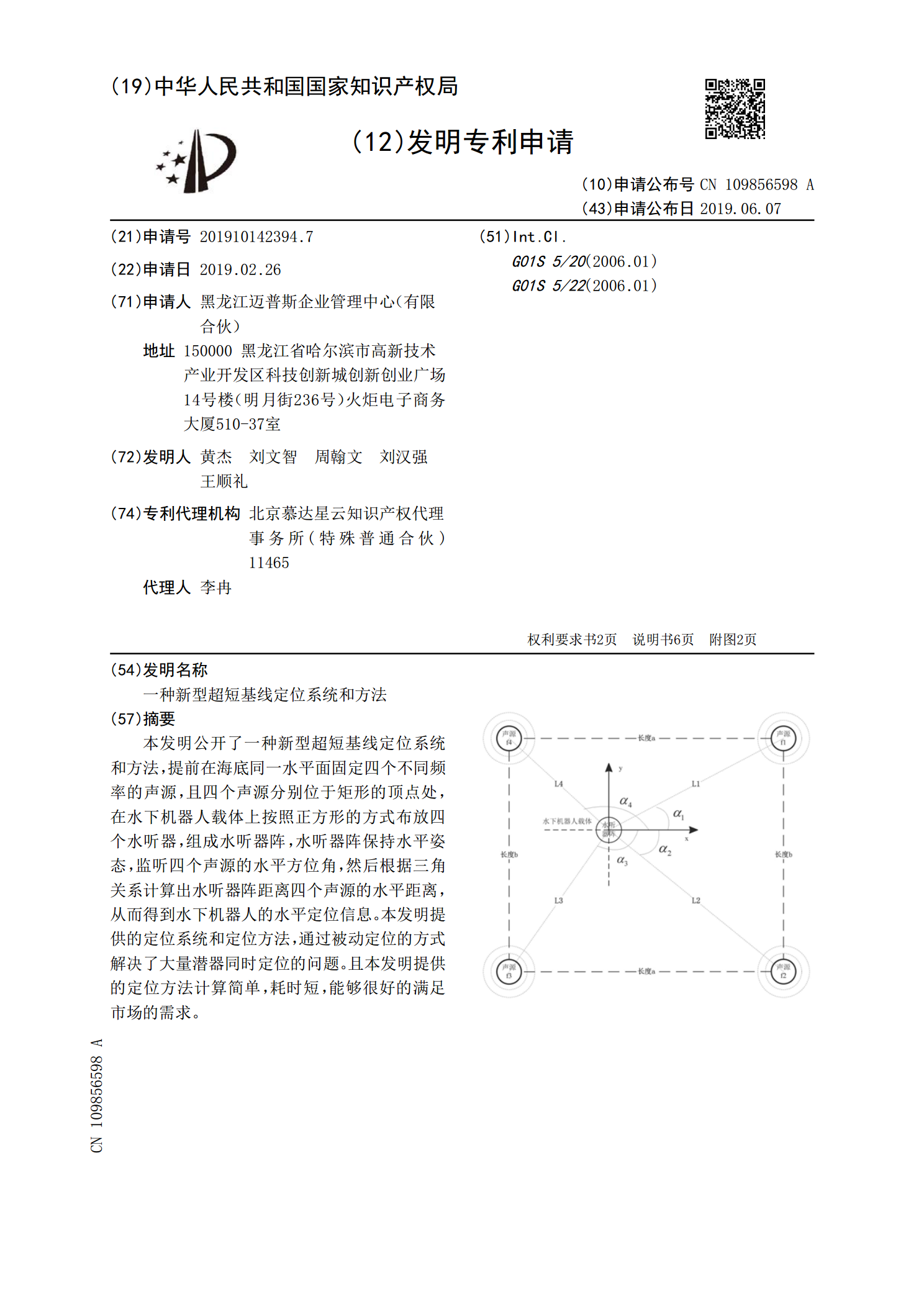
本发明公开了一种新型超短基线定位系统和方法,提前在海底同一水平面固定四个不同频率的声源,且四个声源分别位于矩形的顶点处,在水下机器人载体上按照正方形的方式布放四个水听器,组成水听器阵,水听器阵保持水平姿态,监听四个声源的水平方位角,然后根据三角关系计算出水听器阵距离四个声源的水平距离,从而得到水下机器人的水平定位信息。本发明提供的定位系统和定位方法,通过被动定位的方式解决了大量潜器同时定位的问题。且本发明提供的定位方法计算简单,耗时短,能够很好的满足市场的需求。
一种基于逆超短基线的圆柱阵定位系统及定位方法.pdf
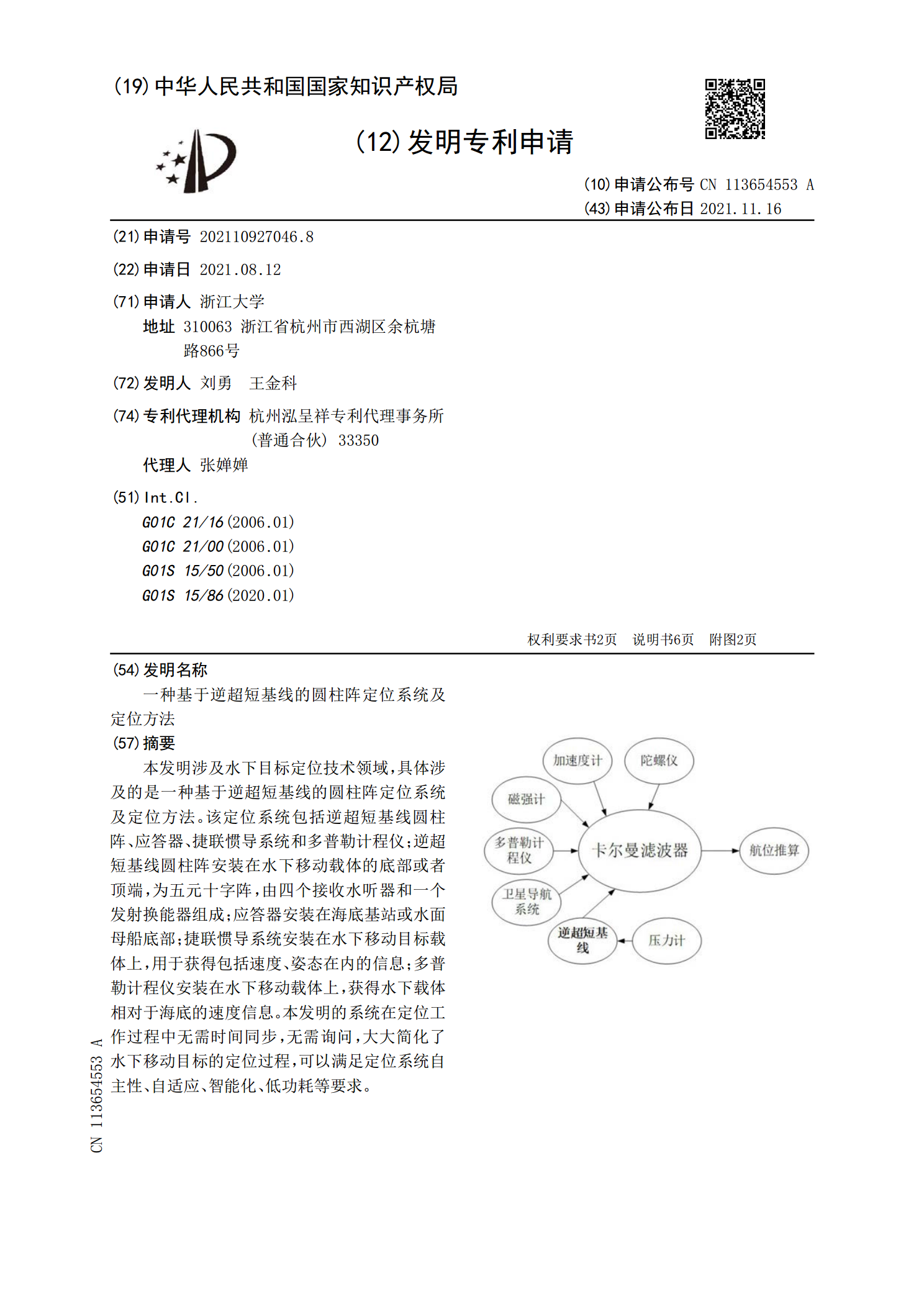
本发明涉及水下目标定位技术领域,具体涉及的是一种基于逆超短基线的圆柱阵定位系统及定位方法。该定位系统包括逆超短基线圆柱阵、应答器、捷联惯导系统和多普勒计程仪;逆超短基线圆柱阵安装在水下移动载体的底部或者顶端,为五元十字阵,由四个接收水听器和一个发射换能器组成;应答器安装在海底基站或水面母船底部;捷联惯导系统安装在水下移动目标载体上,用于获得包括速度、姿态在内的信息;多普勒计程仪安装在水下移动载体上,获得水下载体相对于海底的速度信息。本发明的系统在定位工作过程中无需时间同步,无需询问,大大简化了水下移动目标

一种超短基线定位系统阵型的改进方法.docx
一种超短基线定位系统阵型的改进方法超短基线定位系统(ShortBaselinePositioningSystem,SBPS)是一种以无线电信号传输为基础的位置测量技术,主要用于对于静止或缓慢运动的目标进行定位。超短基线定位系统可以应用于各种领域,例如农业、环境保护、国防和民防等。然而,传统的超短基线定位系统阵型存在着一些问题,例如定位精度受到多路径和信号随机性等因素的影响,同时还存在着系统稳定性较差的问题。因此,需要对超短基线定位系统的阵型进行改进,提高其定位精度和系统稳定性。本文将介绍一种超短基线定位系

利用夹角几何关系的超短基线定位方法.docx
利用夹角几何关系的超短基线定位方法摘要:超短基线定位方法是实现无人机航拍、移动互联网与各种应用程序等技术领域中定位的重要手段,利用夹角几何关系解算出定位坐标,具有简便快捷、低成本、精度高等优点。本文详细介绍了超短基线定位方法的原理、步骤,并通过实验验证了该方法的可行性与精度。关键词:超短基线定位、夹角几何关系、无人机、定位精度一、概述随着移动通信网络和无人机的发展,定位在各个领域中日益重要。超短基线定位方法是利用夹角几何关系,通过无人机航拍等手段解算出定位坐标,具有精度高、成本低等优点,已经被广泛应用于电