
管内行走装置和行走体.pdf

灵波****ng

1/10
2/10
3/10
4/10
5/10

6/10
7/10

8/10

9/10
10/10
亲,该文档总共34页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

管内行走装置和行走体.pdf
本发明的目的在于提供结构简单、能够缩短行走方向整体的长度、并且能够设定前进动作和后退动作用的较大的驱动力的管内行走装置和行走体。管内行走装置包括能够在配管内通过的至少3个行走体,全部的行走体都具有:设置于行走体主体的行走方向一侧的一对行走轮;用于驱动一对行走轮使其旋转的驱动构件;用于以能够在俯仰方向上弯曲的方式与其他行走体连结的连结构件;以及用于使相邻的行走体在偏航方向上摆动的摆动构件。连结构件具有设置于行走体主体的行走方向一侧的第1结构要素和设置于另一侧的第2结构要素,借助连结构件将全部的行走体连结成一
履带式行走体及行走装置.pdf
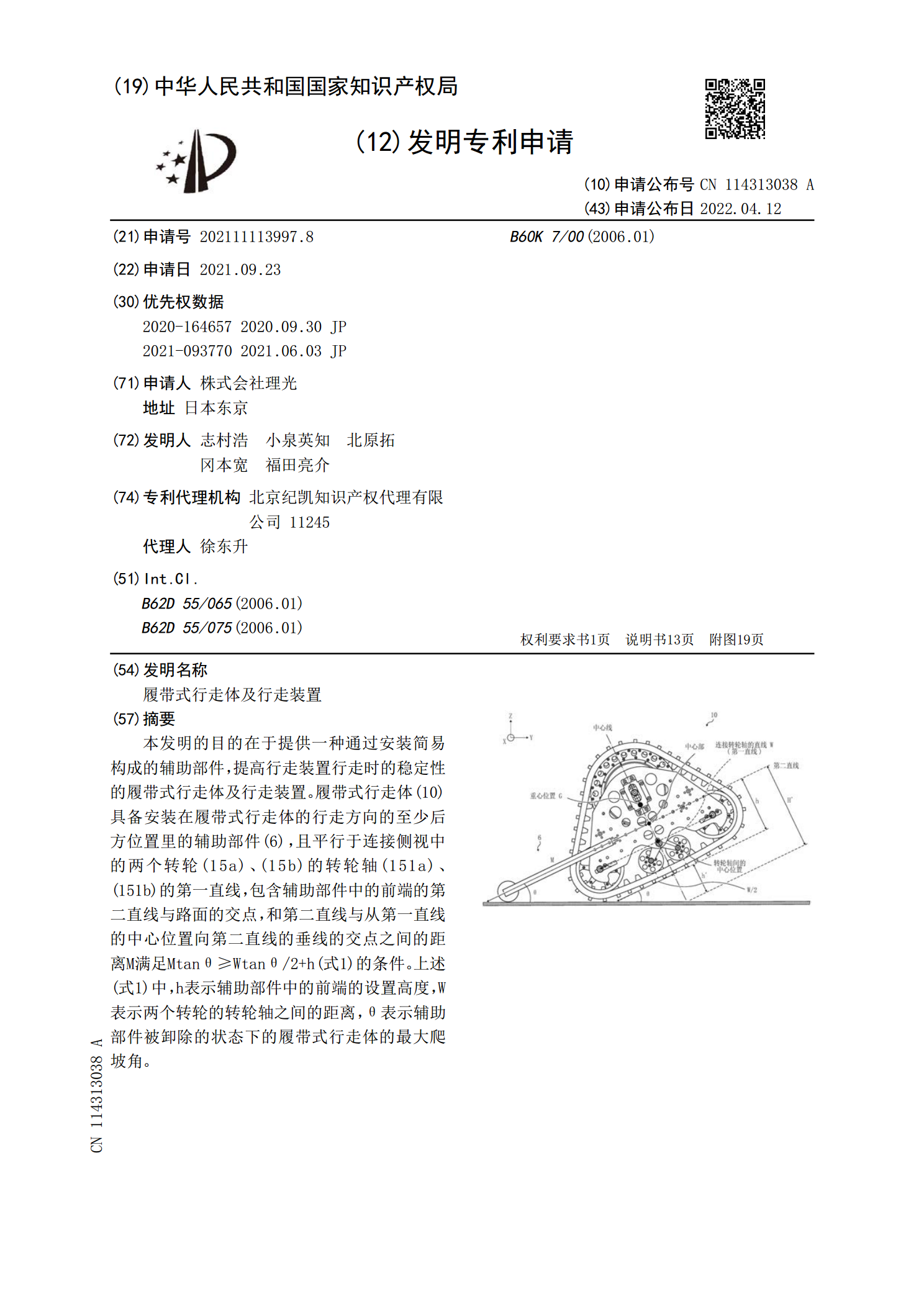
本发明的目的在于提供一种通过安装简易构成的辅助部件,提高行走装置行走时的稳定性的履带式行走体及行走装置。履带式行走体(10)具备安装在履带式行走体的行走方向的至少后方位置里的辅助部件(6),且平行于连接侧视中的两个转轮(15a)、(15b)的转轮轴(151a)、(151b)的第一直线,包含辅助部件中的前端的第二直线与路面的交点,和第二直线与从第一直线的中心位置向第二直线的垂线的交点之间的距离M满足Mtanθ≥Wtanθ/2+h(式1)的条件。上述(式1)中,h表示辅助部件中的前端的设置高度,W表示两个转轮
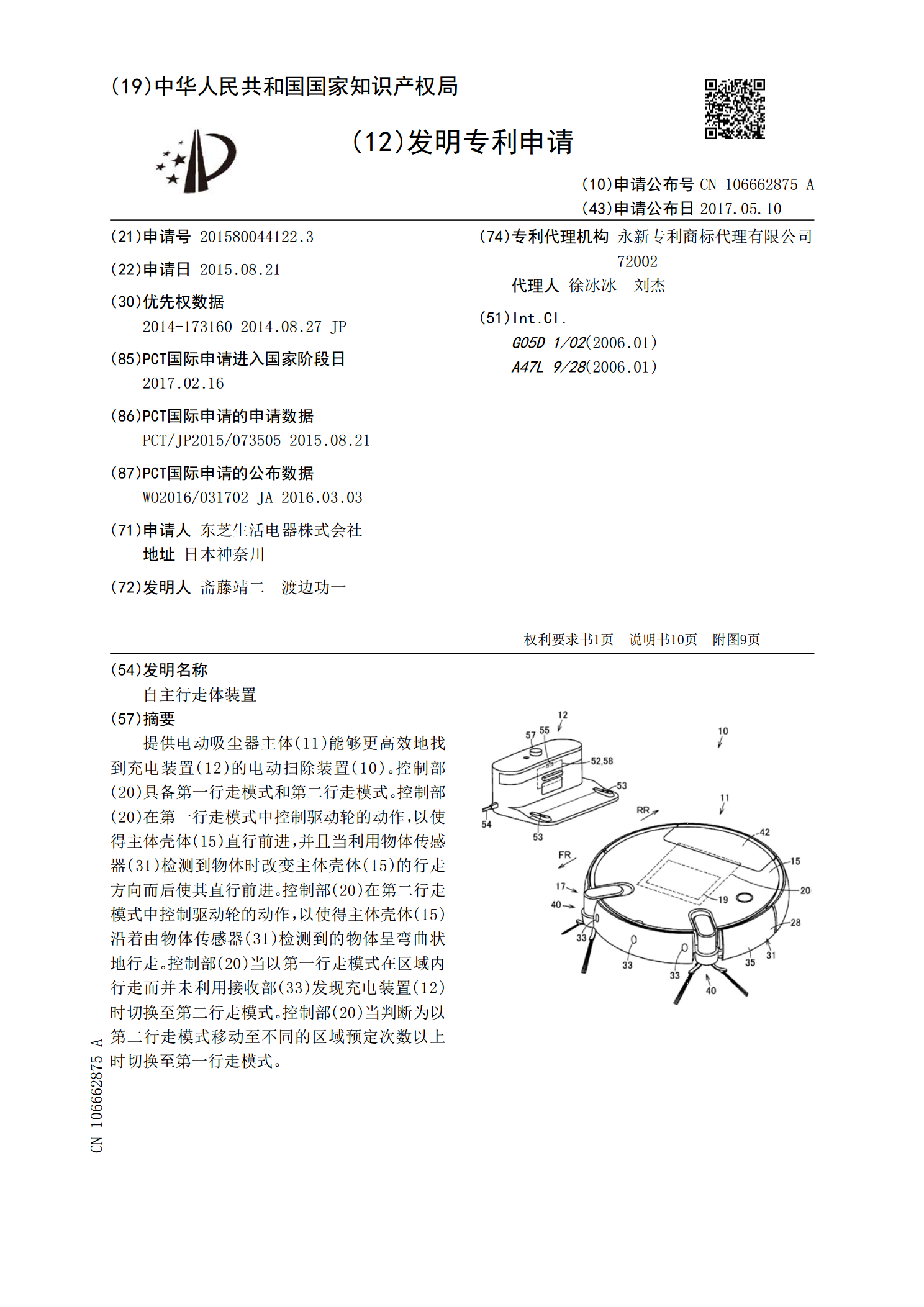
自主行走体装置.pdf
提供电动吸尘器主体(11)能够更高效地找到充电装置(12)的电动扫除装置(10)。控制部(20)具备第一行走模式和第二行走模式。控制部(20)在第一行走模式中控制驱动轮的动作,以使得主体壳体(15)直行前进,并且当利用物体传感器(31)检测到物体时改变主体壳体(15)的行走方向而后使其直行前进。控制部(20)在第二行走模式中控制驱动轮的动作,以使得主体壳体(15)沿着由物体传感器(31)检测到的物体呈弯曲状地行走。控制部(20)当以第一行走模式在区域内行走而并未利用接收部(33)发现充电装置(12)时切换
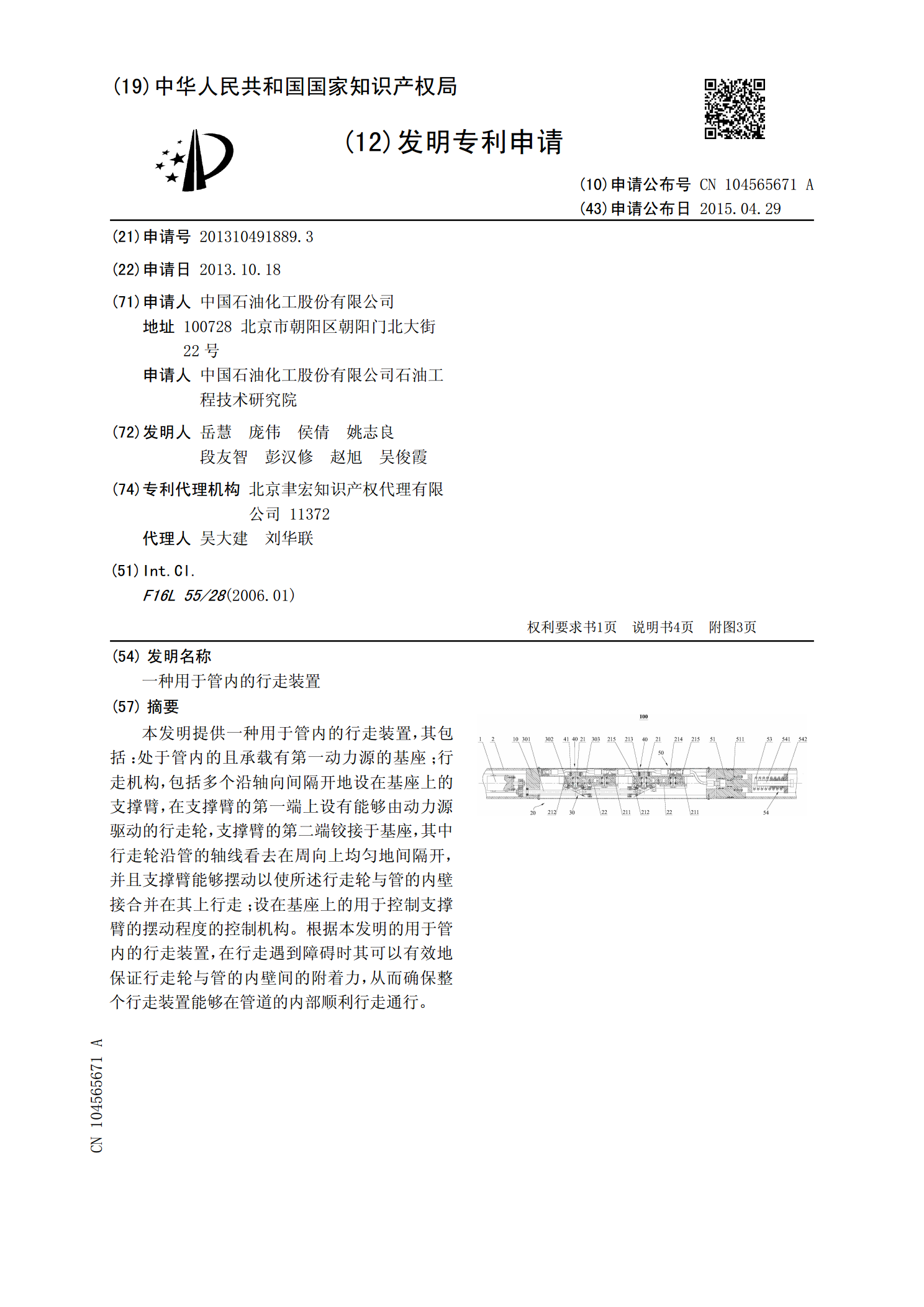
一种用于管内的行走装置.pdf
本发明提供一种用于管内的行走装置,其包括:处于管内的且承载有第一动力源的基座;行走机构,包括多个沿轴向间隔开地设在基座上的支撑臂,在支撑臂的第一端上设有能够由动力源驱动的行走轮,支撑臂的第二端铰接于基座,其中行走轮沿管的轴线看去在周向上均匀地间隔开,并且支撑臂能够摆动以使所述行走轮与管的内壁接合并在其上行走;设在基座上的用于控制支撑臂的摆动程度的控制机构。根据本发明的用于管内的行走装置,在行走遇到障碍时其可以有效地保证行走轮与管的内壁间的附着力,从而确保整个行走装置能够在管道的内部顺利行走通行。

行走装置、用于行走装置的行走系统及方法.pdf
本发明公开了一种行走装置、用于行走装置的行走系统及方法,属于运动装置技术领域,所示行走系统包括支腿,所述支腿包括连杆机构、用于驱动所述连杆机构伸缩的驱转装置;所述连杆机构上设置有轮架;还包括气缸;所述连接件上设置有转轴,气缸可绕所述转轴转动;所述连接件上的转轴与连杆机构上的转轴轴线平行;所述连接件上还设置有锁定件。所示行走装置基于所述行走系统,所述行走方法为所述行走装置的行走方法。采用本方案提供的技术方案,不仅能够对行走装置的承载能力和响应速度上进行优化,同时结构简单,能够良好的适应颠簸路况。