
全向自动导引车导向机构设计及其运动控制研究.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

全向自动导引车导向机构设计及其运动控制研究.docx
全向自动导引车导向机构设计及其运动控制研究标题:全向自动导引车导向机构设计及其运动控制研究摘要:随着自动化技术的不断发展,全向自动导引车成为了现代物流和运输领域的重要设备。为了实现全向行驶和精准导引,本论文针对全向自动导引车的导向机构设计进行了系统研究,并提出了相应的运动控制技术。首先,论文分析了全向自动导引车的导向需求和设计要求,然后通过对现有导向机构的研究与改进,提出了一种新型的全向导向机构设计方案。最后,通过搭建整车模型和进行运动仿真实验,验证了所提出的全向导引机构的有效性和性能。关键词:全向自动导

一种全向自动导引车.pdf
本发明涉及一种全向自动导引车,包括车体框架和驱动总成,所述驱动总成包括心轴、两个驱动电机和连接在同一驱动轮轴上的两个驱动轮;所述两个驱动电机各驱动一个所述驱动轮;所述心轴与所述驱动轮轴的中心部位垂直连接;所述驱动总成通过所述心轴可相对转动地安装在所述车体框架上。本发明提供的全向自动导引车,通过电机差速实现转向,并进而可以通过编码器反馈实现闭环控制,控制逻辑简单,机构稳定可靠,可根据需要实现前进、后退、横移、自旋等多种行进姿态。

自动导引车轨迹跟踪控制方法的设计.docx
自动导引车轨迹跟踪控制方法的设计自动导引车(AGV)是一种无人驾驶车辆,它可以根据预定的路径或任务,自动进行导航和运输。在实际应用中,轨迹跟踪控制是AGV系统的关键技术之一。本论文将探讨AGV轨迹跟踪控制的方法设计。一、AGV轨迹跟踪控制的目标与挑战AGV轨迹跟踪控制的目标是在不断变化的运动环境中,将AGV准确地跟踪预定轨迹,并保持稳定的运动。这对于AGV的安全性、精度和效率都非常重要。AGV轨迹跟踪控制的挑战主要包括以下几个方面:1.环境变化:AGV在运行过程中会遇到各种环境变化,如障碍物、不同路面条件
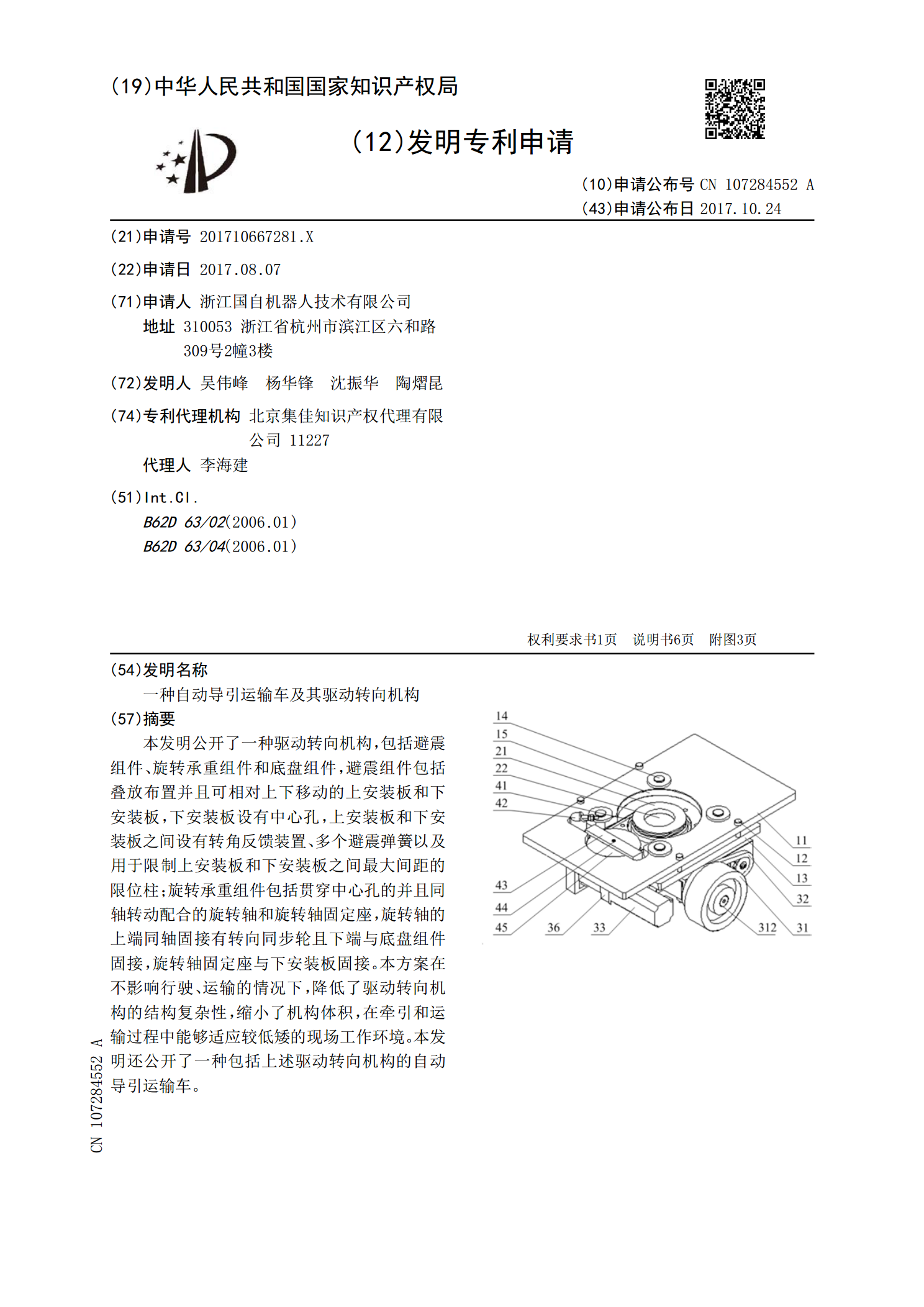
一种自动导引运输车及其驱动转向机构.pdf
本发明公开了一种驱动转向机构,包括避震组件、旋转承重组件和底盘组件,避震组件包括叠放布置并且可相对上下移动的上安装板和下安装板,下安装板设有中心孔,上安装板和下安装板之间设有转角反馈装置、多个避震弹簧以及用于限制上安装板和下安装板之间最大间距的限位柱;旋转承重组件包括贯穿中心孔的并且同轴转动配合的旋转轴和旋转轴固定座,旋转轴的上端同轴固接有转向同步轮且下端与底盘组件固接,旋转轴固定座与下安装板固接。本方案在不影响行驶、运输的情况下,降低了驱动转向机构的结构复杂性,缩小了机构体积,在牵引和运输过程中能够适应
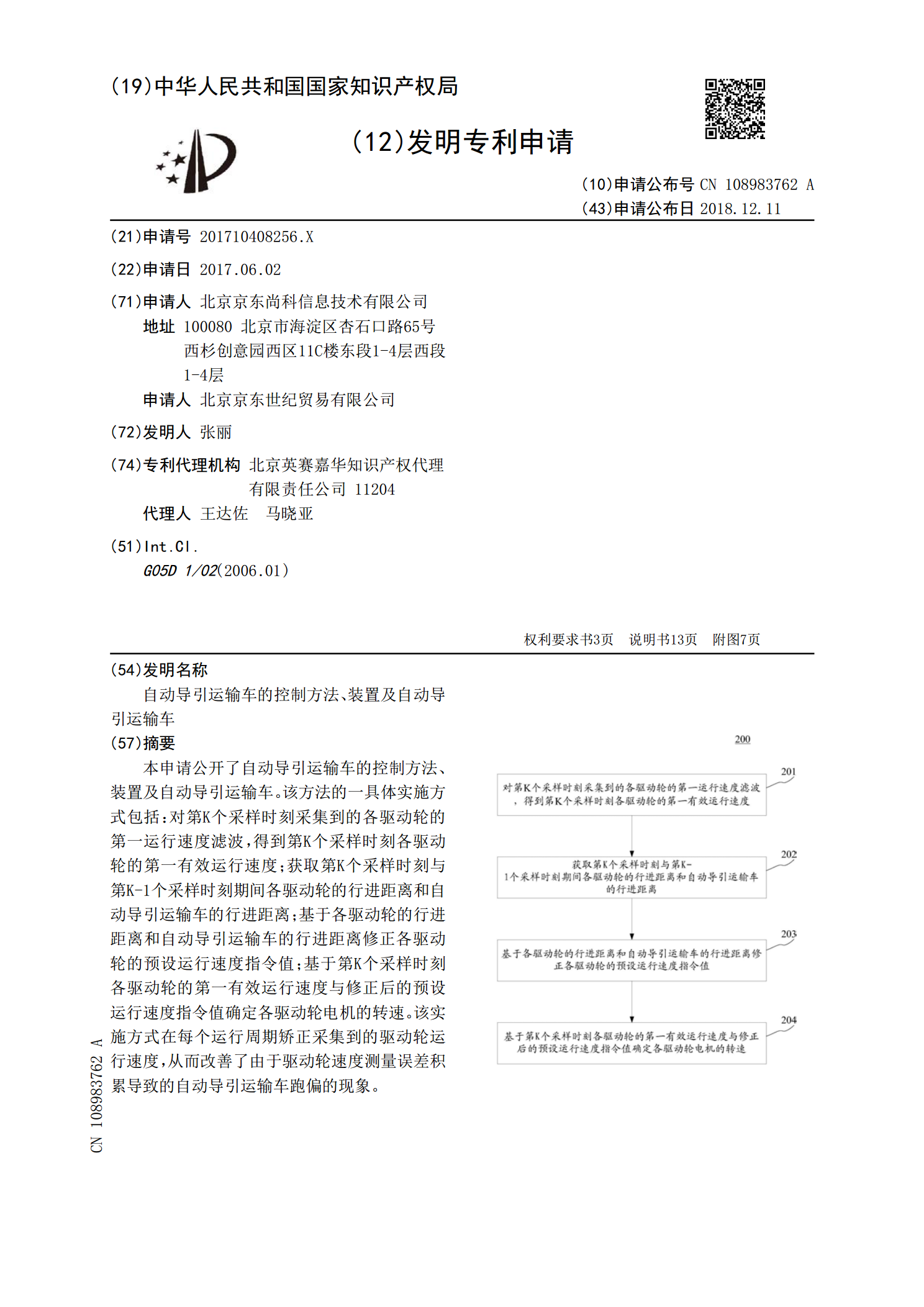
自动导引运输车的控制方法、装置及自动导引运输车.pdf
本申请公开了自动导引运输车的控制方法、装置及自动导引运输车。该方法的一具体实施方式包括:对第K个采样时刻采集到的各驱动轮的第一运行速度滤波,得到第K个采样时刻各驱动轮的第一有效运行速度;获取第K个采样时刻与第K‑1个采样时刻期间各驱动轮的行进距离和自动导引运输车的行进距离;基于各驱动轮的行进距离和自动导引运输车的行进距离修正各驱动轮的预设运行速度指令值;基于第K个采样时刻各驱动轮的第一有效运行速度与修正后的预设运行速度指令值确定各驱动轮电机的转速。该实施方式在每个运行周期矫正采集到的驱动轮运行速度,从而改