
一种机械臂终端滑模控制方法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种机械臂终端滑模控制方法.docx
一种机械臂终端滑模控制方法论文:一种基于机械臂终端滑模控制的方法摘要:机械臂广泛应用于工业自动化领域,实现对各种工业操作的高效自动化。控制机械臂的终端位置对于其操作精度和准确性至关重要。本论文旨在提出一种基于机械臂终端滑模控制的方法,以实现对机械臂终端位置的精确控制。该方法结合滑模控制理论,通过引入滑模面和滑模控制律,将机械臂终端位置控制问题转化为滑模面到达问题。通过仿真实验验证,该方法能够实现对机械臂终端位置的快速、精确控制。关键词:机械臂,终端滑模控制,滑模控制律,滑模面1.引言机械臂广泛应用于各种工

基于滑模干扰观测器的机械臂终端滑模控制.docx
基于滑模干扰观测器的机械臂终端滑模控制基于滑模干扰观测器的机械臂终端滑模控制摘要:机械臂广泛应用于工业生产中的装配、搬运、焊接等任务。然而,由于机械臂的多自由度和非线性特性,其控制问题具有一定的挑战性。为了提高机械臂的控制性能,本文提出了一种基于滑模干扰观测器的机械臂终端滑模控制方法。该方法通过引入滑模干扰观测器,实现对非线性干扰的在线估计和抵消,从而提高了机械臂系统的鲁棒性和控制精度。通过仿真实验证明了该方法的有效性和优越性。关键词:滑模控制;机械臂;滑模干扰观测器;控制精度;鲁棒性1.引言机械臂是一种

机械臂滑模控制算法研究.docx
机械臂滑模控制算法研究一、绪论:机械臂滑模控制是近年来的一个热门研究课题,主要是针对机械臂的运动控制问题。随着机械臂应用场景不断扩大,高精度、高鲁棒性的运动控制成为了越来越迫切的需求。传统的PID控制器在机械臂控制方面仍然有很好的应用,但仍存在一些局限性,无法满足某些难以实现精度要求的应用场景。因此,滑模控制作为高精度、高鲁棒性控制方法在机械臂控制中得到了广泛的研究和应用。机械臂滑模控制具有快速响应、强鲁棒性、精确的跟踪等特点,因而被广泛应用于工业机器人、医疗机器人等各类机械臂系统控制领域。二、机械臂滑模
一种机械臂控制方法、机械臂控制装置及终端设备.pdf
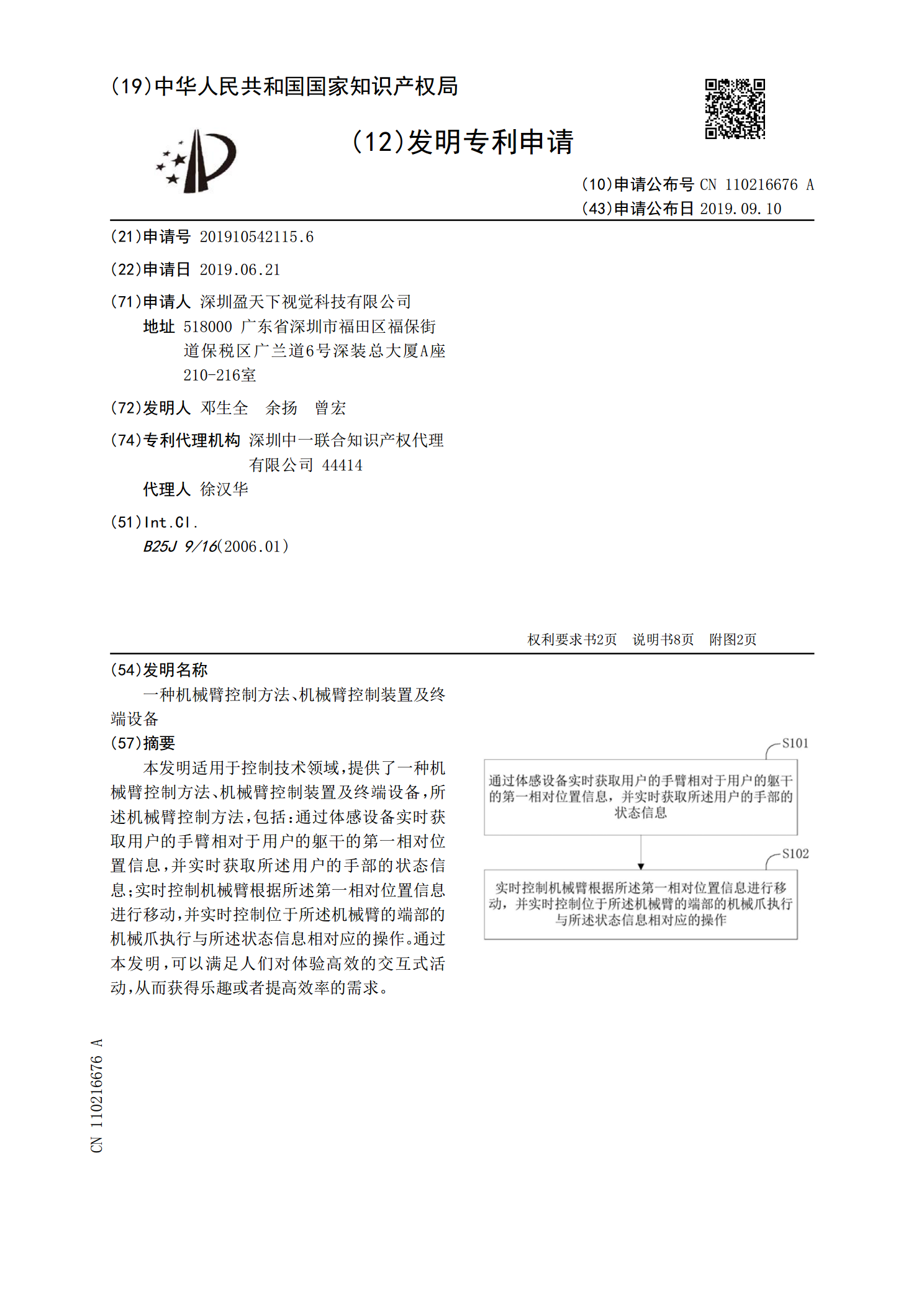
本发明适用于控制技术领域,提供了一种机械臂控制方法、机械臂控制装置及终端设备,所述机械臂控制方法,包括:通过体感设备实时获取用户的手臂相对于用户的躯干的第一相对位置信息,并实时获取所述用户的手部的状态信息;实时控制机械臂根据所述第一相对位置信息进行移动,并实时控制位于所述机械臂的端部的机械爪执行与所述状态信息相对应的操作。通过本发明,可以满足人们对体验高效的交互式活动,从而获得乐趣或者提高效率的需求。

基于迭代滑模算法的机械臂控制.docx
基于迭代滑模算法的机械臂控制基于迭代滑模算法的机械臂控制摘要:机械臂在工业生产中起着重要的作用。针对机械臂的精确控制问题,本文提出了一种基于迭代滑模算法的控制方法。该方法通过引入滑模函数和滑模控制器,实现了对机械臂的精确控制,提高了系统的稳定性和性能。通过仿真实验的验证,结果表明所提出的方法具有较好的控制效果和鲁棒性,可有效应用于机械臂控制系统中。关键词:机械臂控制迭代滑模精确控制系统稳定性鲁棒性1.引言机械臂是一种能够模拟并替代人类手臂的工具,广泛应用于工业生产线和特定环境下的危险操作。机械臂的精确控制