
四轮模块串联摆臂滑行机器人.pdf

冬易****娘子


1/7

2/7

3/7

4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

四轮模块串联摆臂滑行机器人.pdf
本发明提供一种四轮模块串联摆臂滑行机器人,由至少两个模块串联而成,模块间通过连接机构连接;其中每个模块包括基座,所述基座下方设置有四条腿臂,所述基座上固定设置有三个电机,其中两个电机设置为直接驱动单条腿臂,另一个电机设置为通过传动机构同时驱动两条腿臂,每条腿臂包括杆部,轮架,以及与轮架的一端枢接的轮子,所述轮架的另一端与所述杆部的一端相连接,能够以杆部的一端为轴旋转,所述杆部的另一端与电机的输出轴直接或间接连接,所述杆部的轴线相对于地面倾斜;通过控制每个模块的运动方向,使得四轮模块串联摆臂滑行机器人实现整
两轮模块串联摆臂滑行机器人.pdf
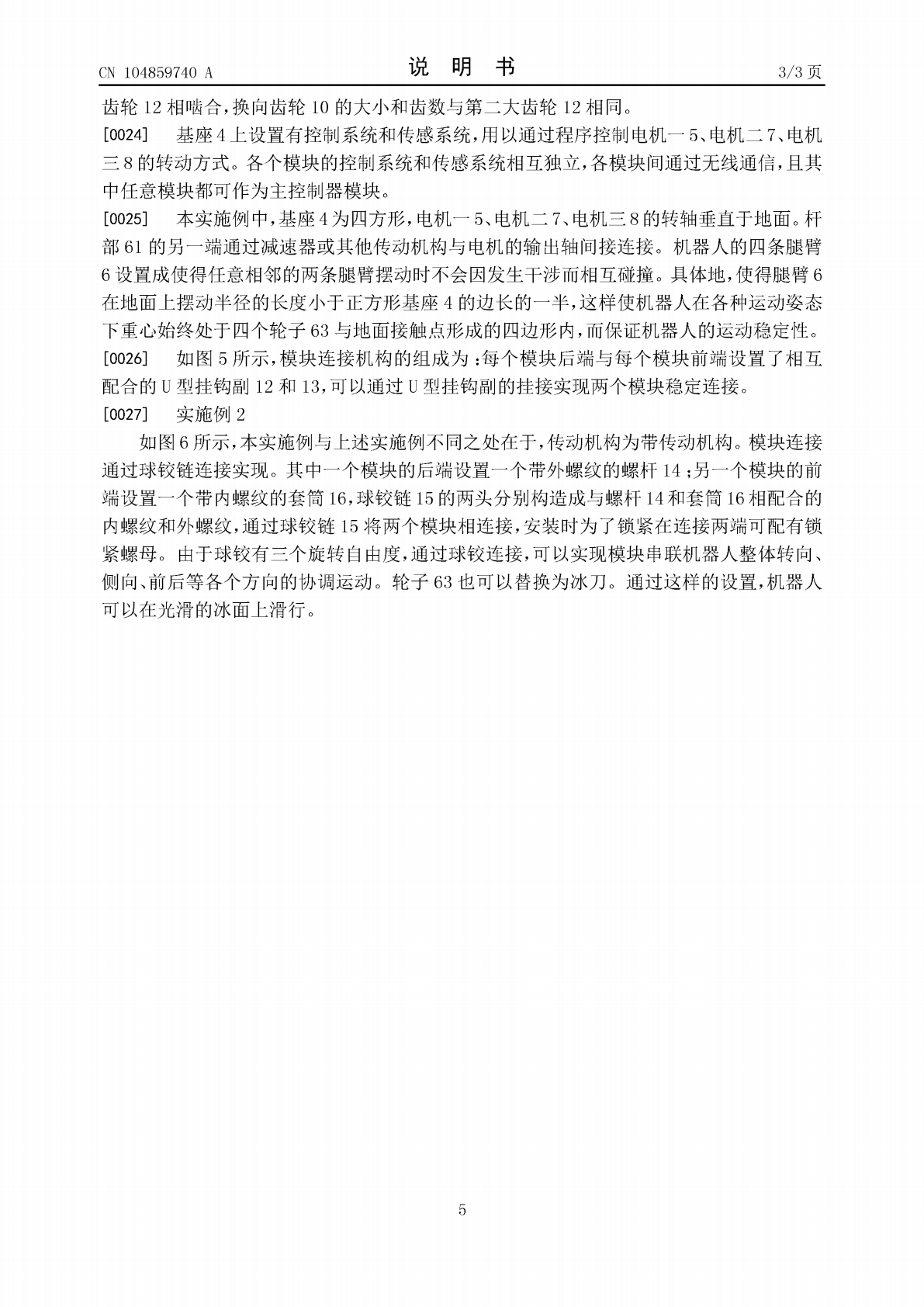
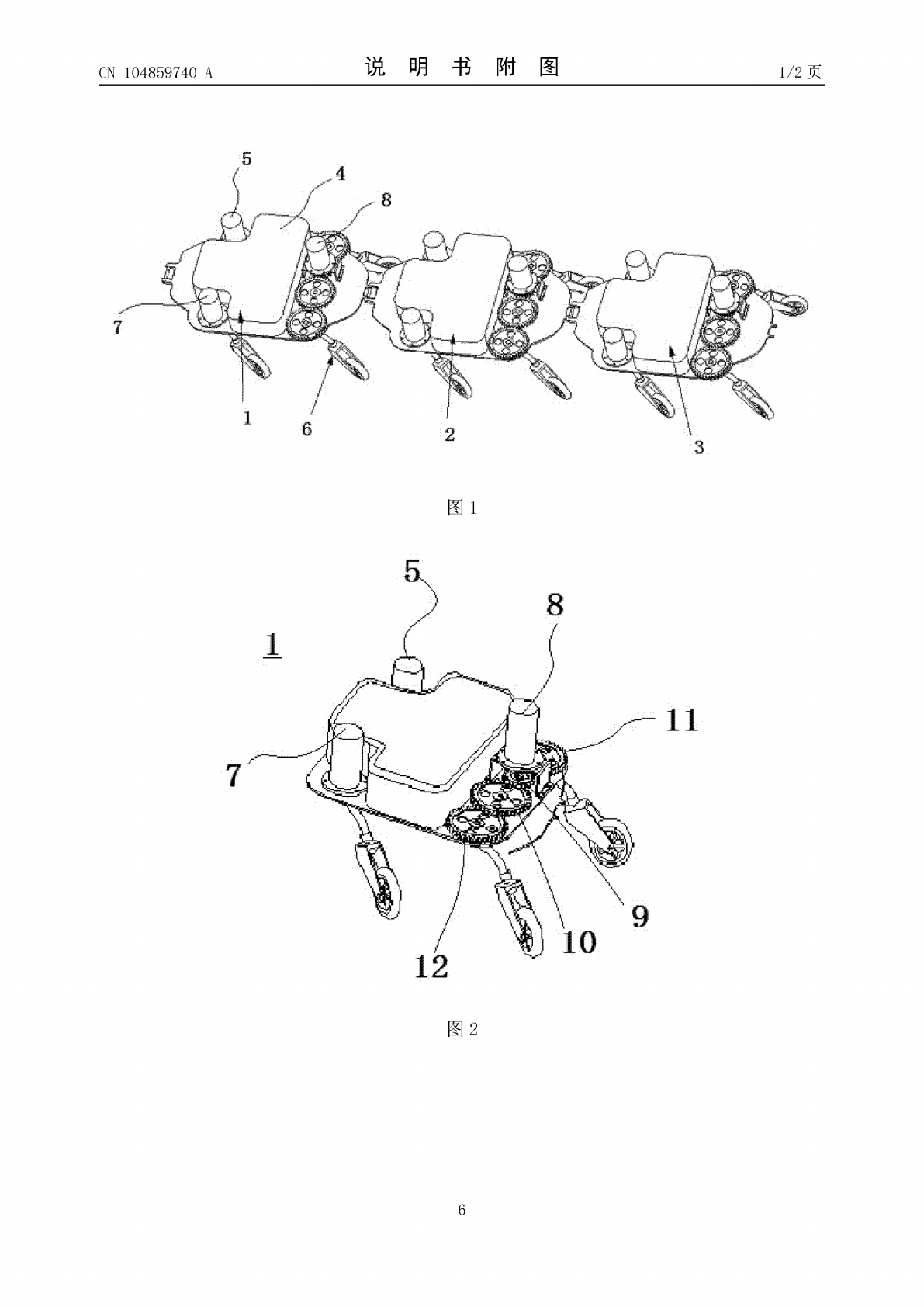
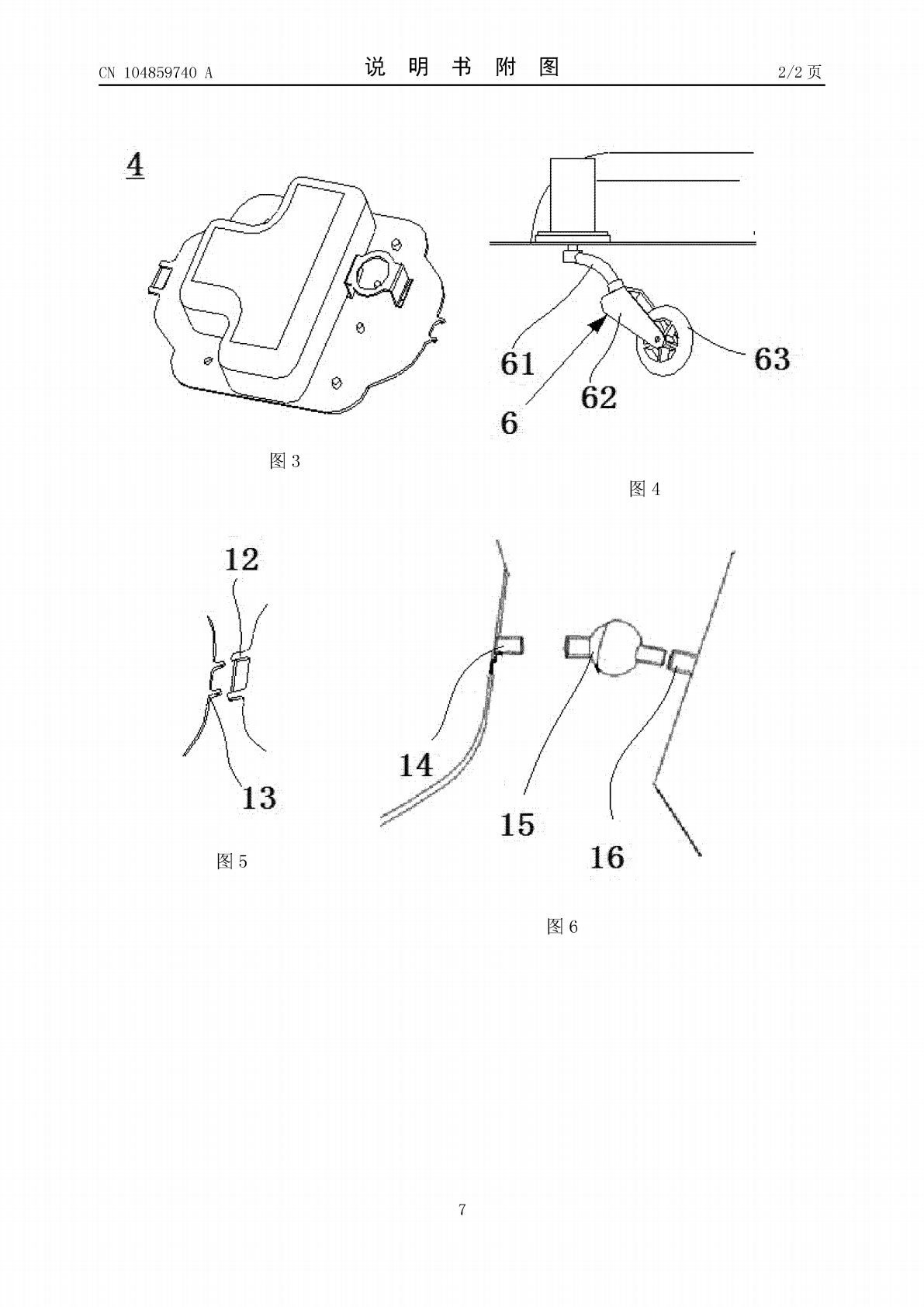
本发明提供一种两轮模块串联摆臂滑行机器人,由至少两个模块串联而成,模块间通过连接机构连接;其中每个模块包括基座,所述基座下方设置有两条腿臂,所述基座上固定设置有两个电机,用以驱动与所述两个电机一一对应的两条腿臂;每条所述腿臂包括杆部,轮架,以及与轮架的一端枢接的轮子,所述轮架的另一端与所述杆部的一端相连接,能够以杆部的一端为轴旋转,所述杆部的另一端与电机的输出轴直接或间接连接,所述杆部的轴线相对于地面倾斜;通过控制每个模块的运动方向,使得两轮模块串联摆臂滑行机器人实现朝各个方向的整体的协调运动。本发明具有
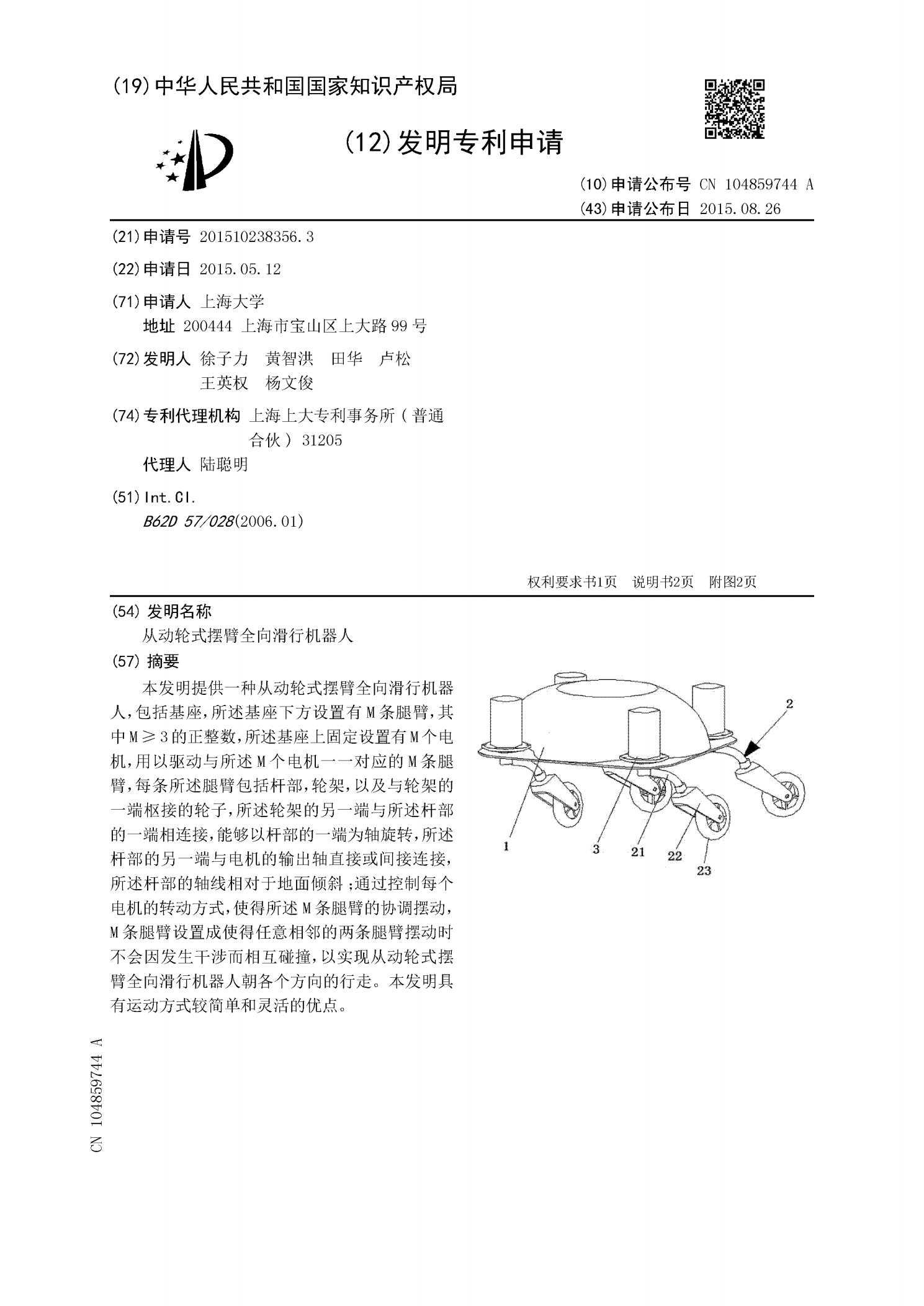
从动轮式摆臂全向滑行机器人.pdf
本发明提供一种从动轮式摆臂全向滑行机器人,包括基座,所述基座下方设置有M条腿臂,其中M≥3的正整数,所述基座上固定设置有M个电机,用以驱动与所述M个电机一一对应的M条腿臂,每条所述腿臂包括杆部,轮架,以及与轮架的一端枢接的轮子,所述轮架的另一端与所述杆部的一端相连接,能够以杆部的一端为轴旋转,所述杆部的另一端与电机的输出轴直接或间接连接,所述杆部的轴线相对于地面倾斜;通过控制每个电机的转动方式,使得所述M条腿臂的协调摆动,M条腿臂设置成使得任意相邻的两条腿臂摆动时不会因发生干涉而相互碰撞,以实现从动轮式摆
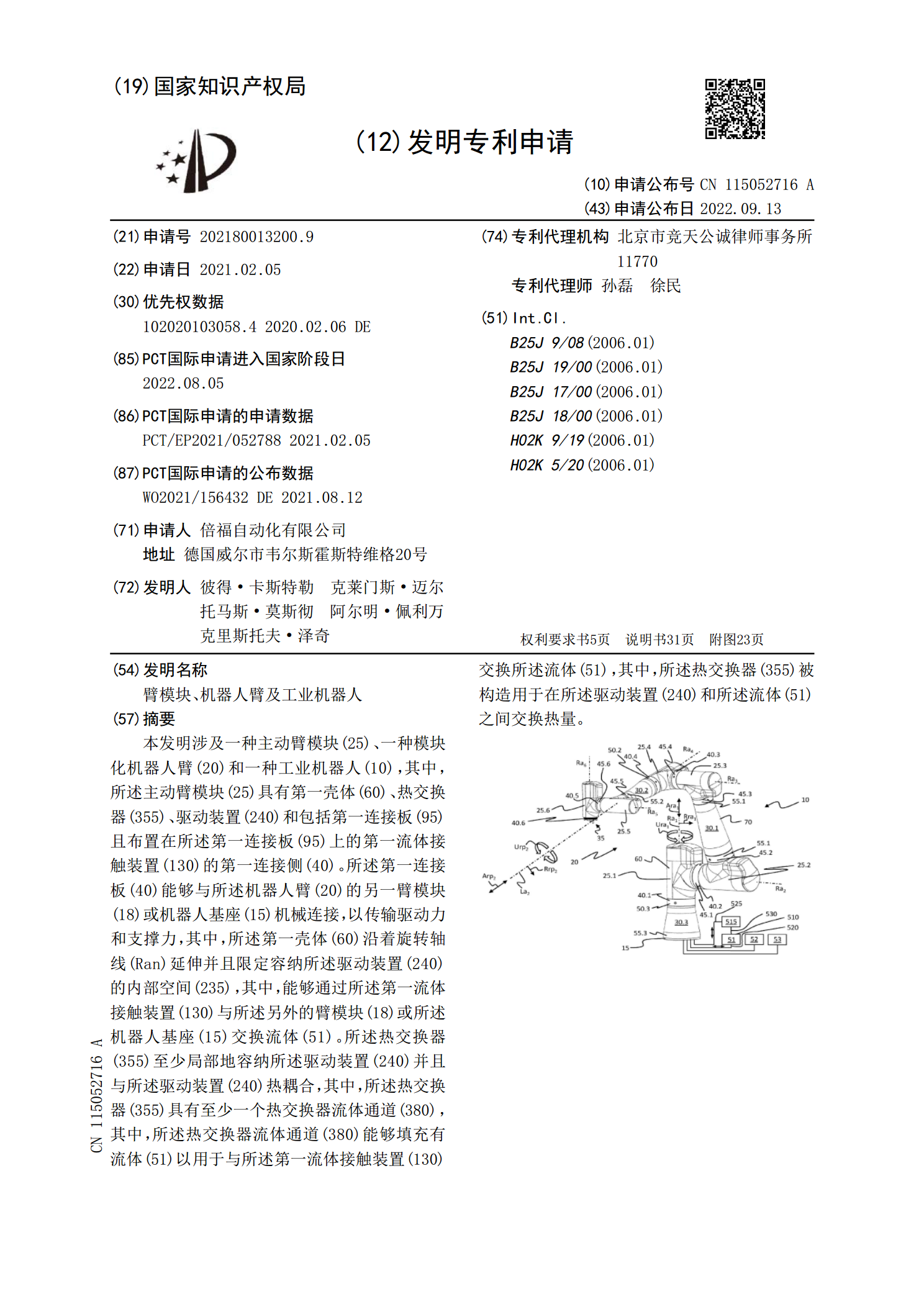
臂模块、机器人臂及工业机器人.pdf
本发明涉及一种主动臂模块(25)、一种模块化机器人臂(20)和一种工业机器人(10),其中,所述主动臂模块(25)具有第一壳体(60)、热交换器(355)、驱动装置(240)和包括第一连接板(95)且布置在所述第一连接板(95)上的第一流体接触装置(130)的第一连接侧(40)。所述第一连接板(40)能够与所述机器人臂(20)的另一臂模块(18)或机器人基座(15)机械连接,以传输驱动力和支撑力,其中,所述第一壳体(60)沿着旋转轴线(Ran)延伸并且限定容纳所述驱动装置(240)的内部空间(235),其
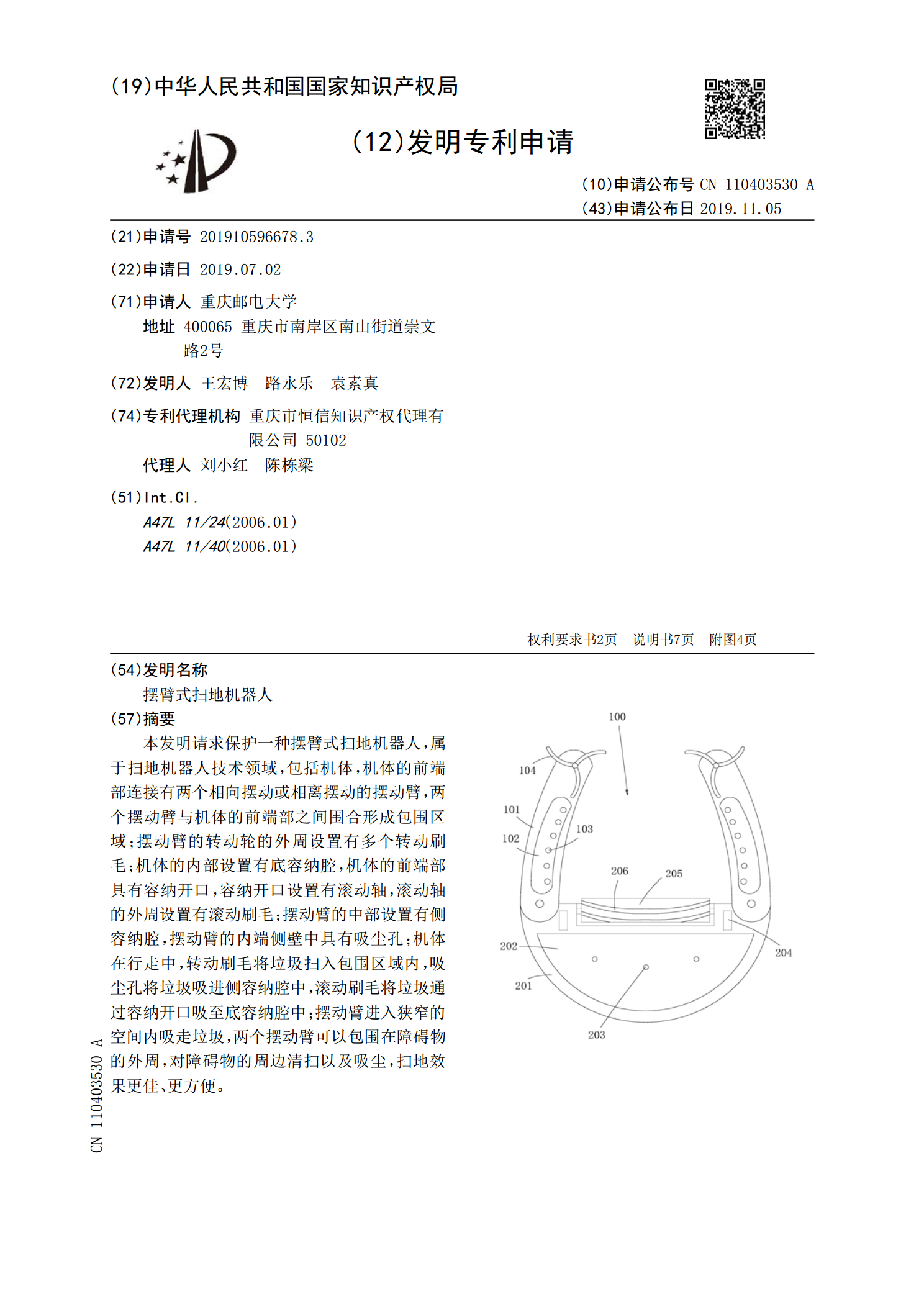
摆臂式扫地机器人.pdf
本发明请求保护一种摆臂式扫地机器人,属于扫地机器人技术领域,包括机体,机体的前端部连接有两个相向摆动或相离摆动的摆动臂,两个摆动臂与机体的前端部之间围合形成包围区域;摆动臂的转动轮的外周设置有多个转动刷毛;机体的内部设置有底容纳腔,机体的前端部具有容纳开口,容纳开口设置有滚动轴,滚动轴的外周设置有滚动刷毛;摆动臂的中部设置有侧容纳腔,摆动臂的内端侧壁中具有吸尘孔;机体在行走中,转动刷毛将垃圾扫入包围区域内,吸尘孔将垃圾吸进侧容纳腔中,滚动刷毛将垃圾通过容纳开口吸至底容纳腔中;摆动臂进入狭窄的空间内吸走垃圾