
摆臂式扫地机器人.pdf

St****36


1/10
2/10
3/10
4/10

5/10
6/10
7/10

8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
摆臂式扫地机器人.pdf
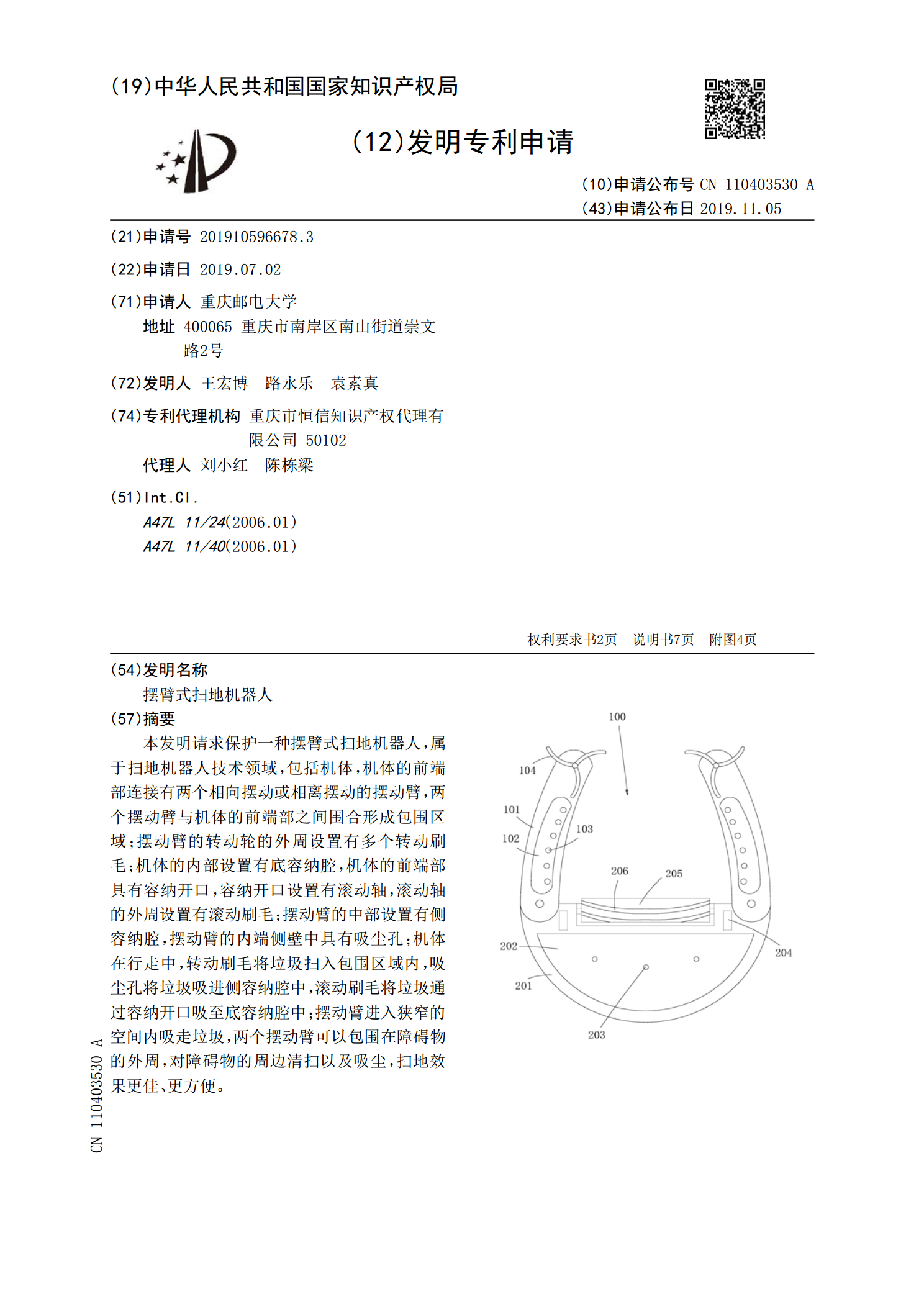
本发明请求保护一种摆臂式扫地机器人,属于扫地机器人技术领域,包括机体,机体的前端部连接有两个相向摆动或相离摆动的摆动臂,两个摆动臂与机体的前端部之间围合形成包围区域;摆动臂的转动轮的外周设置有多个转动刷毛;机体的内部设置有底容纳腔,机体的前端部具有容纳开口,容纳开口设置有滚动轴,滚动轴的外周设置有滚动刷毛;摆动臂的中部设置有侧容纳腔,摆动臂的内端侧壁中具有吸尘孔;机体在行走中,转动刷毛将垃圾扫入包围区域内,吸尘孔将垃圾吸进侧容纳腔中,滚动刷毛将垃圾通过容纳开口吸至底容纳腔中;摆动臂进入狭窄的空间内吸走垃圾

摆臂式独轮走钢丝机器人.pdf
本发明公开了一种摆臂式独轮走钢丝机器人,包括调节侧向平衡的平衡杆机构、平衡质心的摆臂机构和前后行走以及调节俯仰平衡的独轮机构,所述摆臂机构建立于独轮机构上,所述平衡杆机构建立在摆臂机构上,平衡杆的转动产生反力矩抵消机械装置的倾倒力矩,摆臂的平动补偿机械装置的质心偏移,行走齿轮的运动参数实现机械装置的俯仰姿态控制及行走。本发明中,平衡杆的转动和摆臂的平动分别模拟人类走钢丝时双手的动作,行走齿轮模拟人类走钢丝的俯仰姿态调节,有效地模拟了人类走钢丝时的手臂运动和俯仰姿态的力学行为,实现机器人在刚性或柔性钢丝上自

一种摆臂式履带机器人.pdf
本申请公开了一种摆臂式履带机器人,包括机架、传动机构、摆臂机构和锁止机构,传动机构的直流电机固定在机架后方并且与驱动轮相连提供动力,驱动轮带动主履带运动从而带动从动轮旋转,从动轮与副驱动轮相连并且保持同步转动;摆臂机构位于机架一侧,摆臂机构的摆臂舵机可通过减速齿轮将动力传至转动轴,转动轴与机架两侧的摆臂固连从而带动摆臂一同旋转;锁止机构位于机架另一侧,锁止机构的锁止舵机通过齿轮配合带动锁止外盘正反转动,锁止外盘上的螺旋轨道带动锁止内盘的锁止销内外运动从而实现对转动轴即摆臂的锁止与释放。本申请提供的技术方案

多节摆臂履带式矿难探测机器人.pdf
多节摆臂履带式矿难探测机器人由三节车体、履带式行走机构、前后摆臂单元、关节模块和动力装置组成。每节车体具有独立的履带式行走机构,对称的分置于车体两侧;首末两个车体分别带有两个履带式摆臂,摆臂用电机控制可绕车体本身旋转,同时摆臂履带通过车体履带的从动轮传动,实现车体履带和摆臂履带的同步转动;车体之问通过关节装置连接,该装置可实现各节车体的俯仰和偏航;首末两节车体分别装有动力装置,两节车体均可牵引或推动整个机器人。本发明整体构造简单;履带式行走机构具有良好的爬坡和越障性能;前后摆臂提高了机器人穿越垂直障碍和较

摆臂式供料装置.pdf
一种摆臂式供料装置,包括支架,在该支架上装有一对胶辊,其中一个胶辊的胶辊轴通过同步带机构与安装在支架上的胶辊驱动电机传动连接,其特征在于,在所述的支架的后端通过一驱动轴与一对摆臂的一端铰接,在摆臂的另一端设有开口朝上的凹槽;该驱动轴与支架转动连接,并与摆臂固定连接,该驱动轴的一端通过齿轮传动机构与安装在支架上的摆臂驱动电机传动连接;在原料轴的两端各装有一个滚轮。本发明的有益效果是:装料省力;能耗低;结构简单,降低了制造成本;通过较长的凹槽和设在凹槽两侧的位置开关,再配合红外传感器和摆臂上限位开关可以控制摆