
直线电机控制的可伸缩的越障支臂及越障机器人.pdf

夏萍****文章


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

直线电机控制的可伸缩的越障支臂及越障机器人.pdf
本发明公开了直线电机控制的可伸缩的越障支臂,包括前行走轮和后行走轮;前行走轮安装在伸缩支臂上,后行走轮安装在支臂体上;后行走轮内设有动力输出轴,带动后行走轮转动,后行走轮通过越障履带带动前行走轮转动;伸缩支臂在直线电机凸轮组合的带动下能相对于支臂体做伸缩运动;固定在支臂体上的涨紧轮机构与直线电机凸轮组合的凸轮相配合以涨紧越障履带。本发明所采用的直线电机尺寸小,重量轻,推力大,传动精度高;采用的凸轮机构与涨紧轮机构结构简单,制造方便,安全可靠;设计的支臂可伸缩变换长度,对复杂环境适应力强。通过更换不同长度的

双棘轮式可伸缩的越障支臂及越障机器人.pdf
本发明公开了一种双棘轮式可伸缩的越障支臂及越障机器人,其中双棘轮式可伸缩的越障支臂包括间隙配合的伸缩支臂与支臂体;支臂体上固定有后行走轮,后行走轮的轴向串联有动力输出轴;伸缩支臂上固定前行走轮,前行走轮的轴向串联有传动轴;越障履带套合在后行走轮和前行走轮上;支臂体上固定有涨紧轮机构;支臂体上靠近伸缩支臂一端固定有双棘轮机构;双棘轮机构在电机编码器的控制下,带动齿条左右运动;齿条一端与伸缩支臂相连,另一端与凸轮相连;凸轮与涨紧轮机构相切配合;齿条左右运动带动凸轮左右运动和伸缩支臂伸缩滑动;凸轮运动使得涨紧轮
双丝杠结构可伸缩的越障支臂及越障机器人.pdf
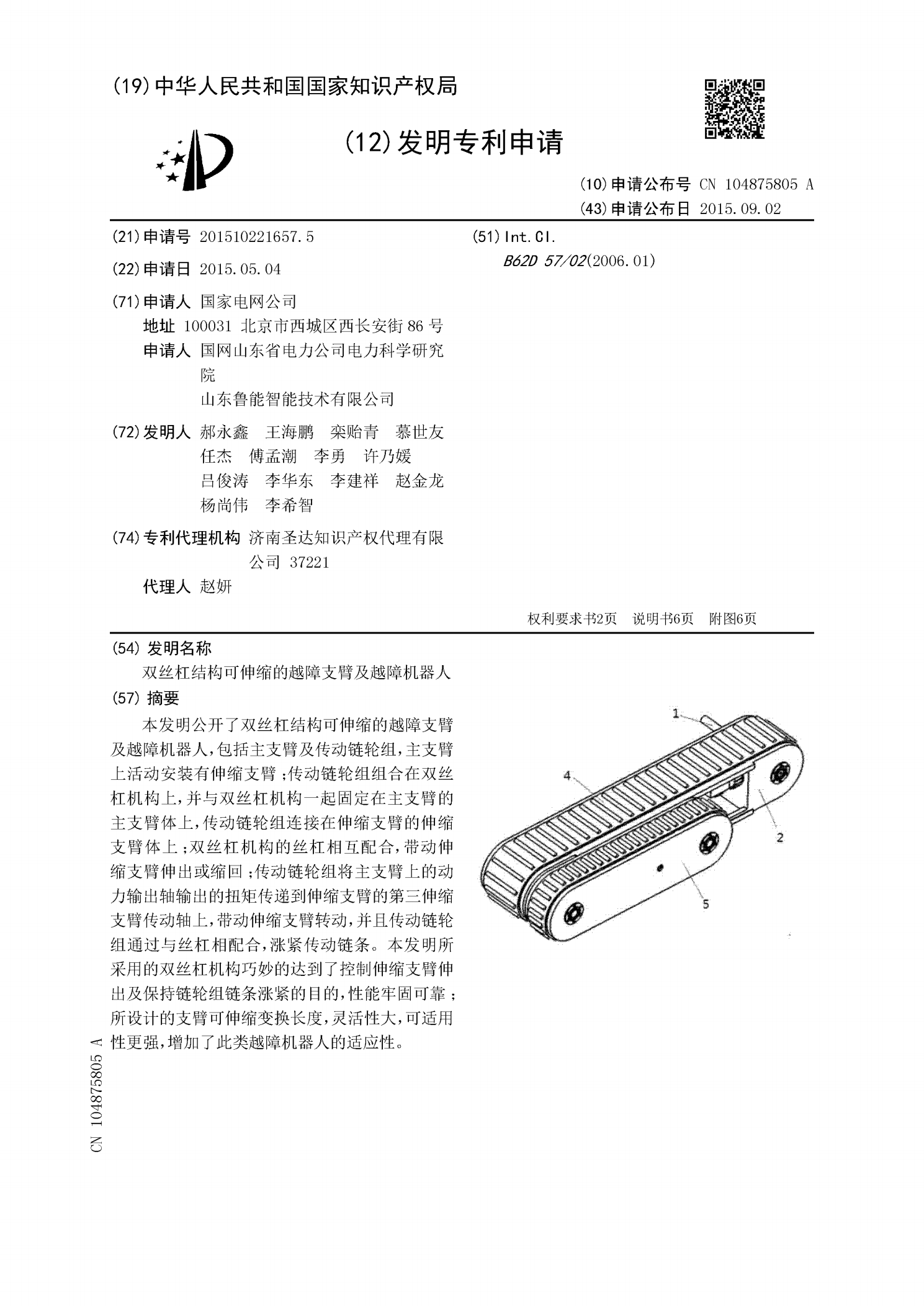
本发明公开了双丝杠结构可伸缩的越障支臂及越障机器人,包括主支臂及传动链轮组,主支臂上活动安装有伸缩支臂;传动链轮组组合在双丝杠机构上,并与双丝杠机构一起固定在主支臂的主支臂体上,传动链轮组连接在伸缩支臂的伸缩支臂体上;双丝杠机构的丝杠相互配合,带动伸缩支臂伸出或缩回;传动链轮组将主支臂上的动力输出轴输出的扭矩传递到伸缩支臂的第三伸缩支臂传动轴上,带动伸缩支臂转动,并且传动链轮组通过与丝杠相配合,涨紧传动链条。本发明所采用的双丝杠机构巧妙的达到了控制伸缩支臂伸出及保持链轮组链条涨紧的目的,性能牢固可靠;所设
可越障查验机器人及其越障方法.pdf
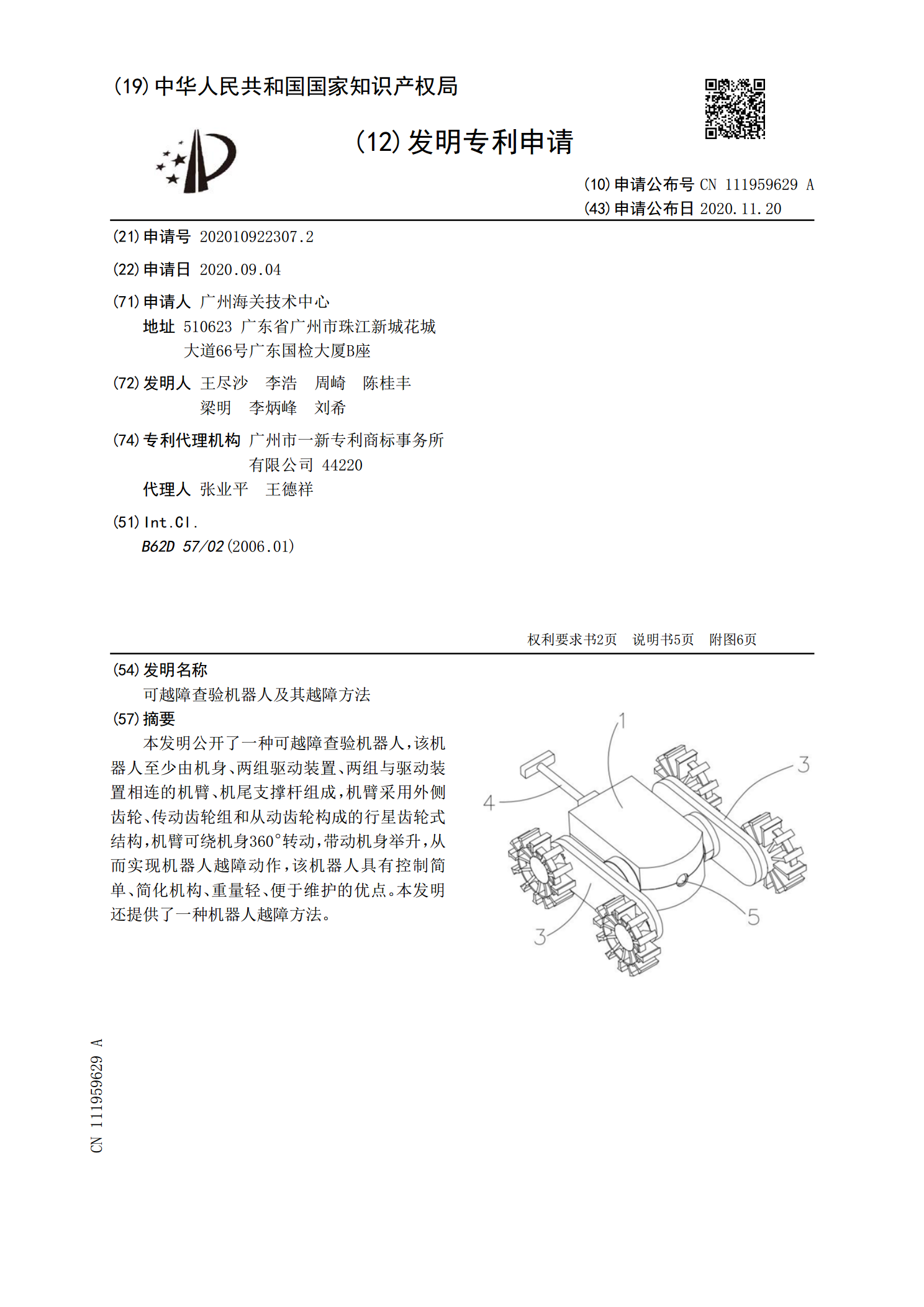
本发明公开了一种可越障查验机器人,该机器人至少由机身、两组驱动装置、两组与驱动装置相连的机臂、机尾支撑杆组成,机臂采用外侧齿轮、传动齿轮组和从动齿轮构成的行星齿轮式结构,机臂可绕机身360°转动,带动机身举升,从而实现机器人越障动作,该机器人具有控制简单、简化机构、重量轻、便于维护的优点。本发明还提供了一种机器人越障方法。
一种可越障的陪跑机器人及其越障控制方法.pdf
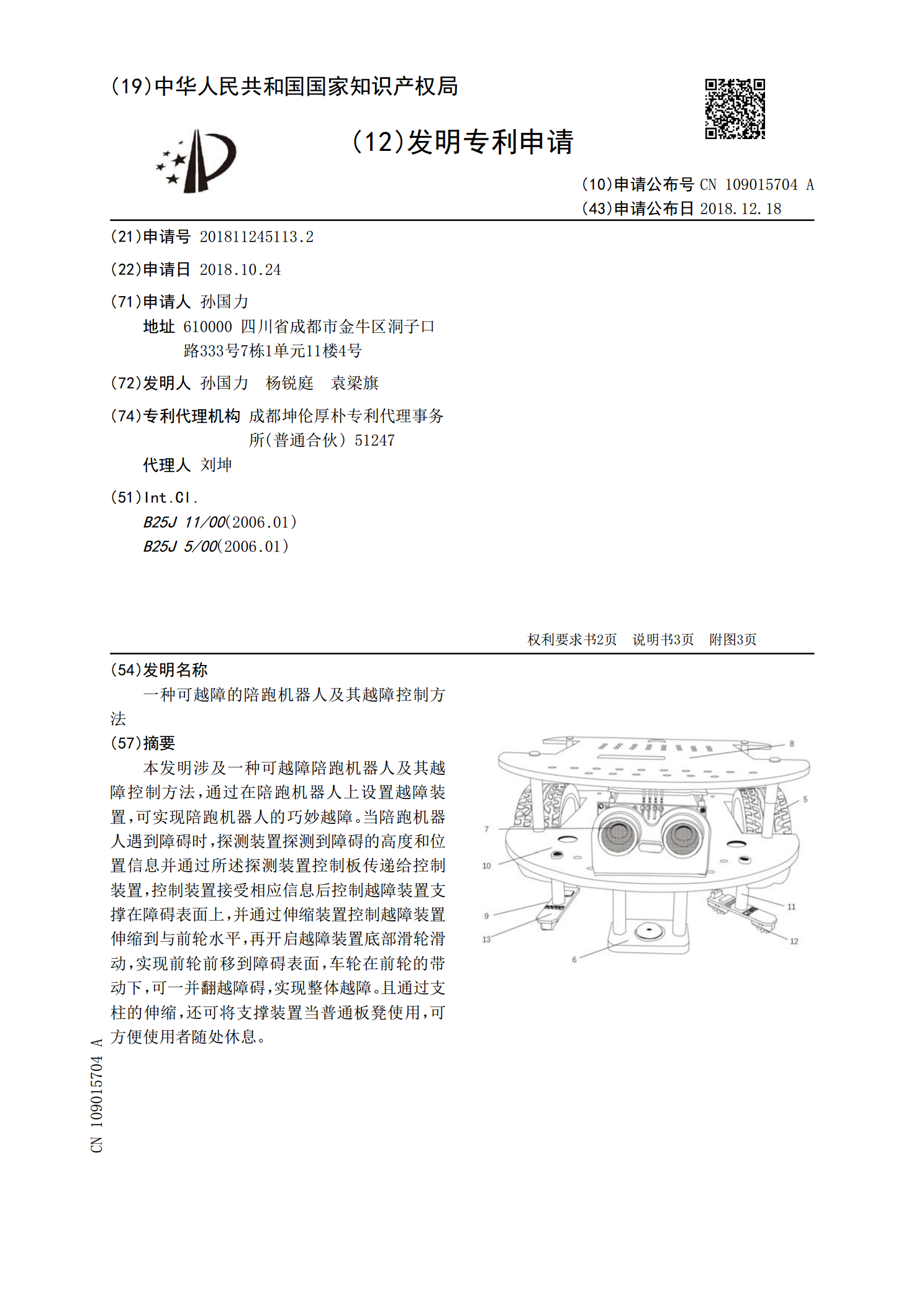
本发明涉及一种可越障陪跑机器人及其越障控制方法,通过在陪跑机器人上设置越障装置,可实现陪跑机器人的巧妙越障。当陪跑机器人遇到障碍时,探测装置探测到障碍的高度和位置信息并通过所述探测装置控制板传递给控制装置,控制装置接受相应信息后控制越障装置支撑在障碍表面上,并通过伸缩装置控制越障装置伸缩到与前轮水平,再开启越障装置底部滑轮滑动,实现前轮前移到障碍表面,车轮在前轮的带动下,可一并翻越障碍,实现整体越障。且通过支柱的伸缩,还可将支撑装置当普通板凳使用,可方便使用者随处休息。