
一种主动前轮转向的快速控制原型实现方法.pdf

玄静****写意


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种主动前轮转向的快速控制原型实现方法.pdf
一种主动前轮转向的快速控制原型属于转向控制系统领域。其特征在于,包括主动前轮转向系统、电机控制器、主机;主动前轮转向系统包括转向盘、轴承、转向盘转角传感器、转向盘转矩传感器、转向轴、转向轴转角传感器、转向器和电机;转向盘与轴承外圈连接,转向轴顶端与轴承内圈连接,转向轴底部与转向器机械连接;的主机中包含数据采集板卡和AFS控制器,传感器通过信号线和数据采集板卡连接。本发明保留了电动助力转向系统原有的电机和转向装置,简化了系统的结构,降低了成本。通过轴承将转向盘和转向轴连接起来,能够保持良好的路感,并可实现线

一种主动后轮转向的快速控制原型实现方法.pdf
一种主动后轮转向的快速控制原型实现方法,属于转向控制系统领域。其特征在于,包括转向盘转角传感器、轮速传感器、横摆角速度传感器、纵向加速度传感器、工控机、接线端子板、显示器和转向电机,根据建立的后轮主动转向快速控制原型,实时采集与输出数据,实现后轮主动转向的控制,验证控制算法的正确性,实现控制器的快速开发,降低了开发成本、率缩短了开发周期、提高了开发效。本发明应用于后轮采用轮毂电机驱动的电动汽车上,能够提高车辆的转向稳定性,改善车辆系统的动态性能,并能在前轮转向失效情况下保证车辆的操纵稳定性,另外,通过控制
一种汽车主动前轮转向系统的容错控制方法.pdf
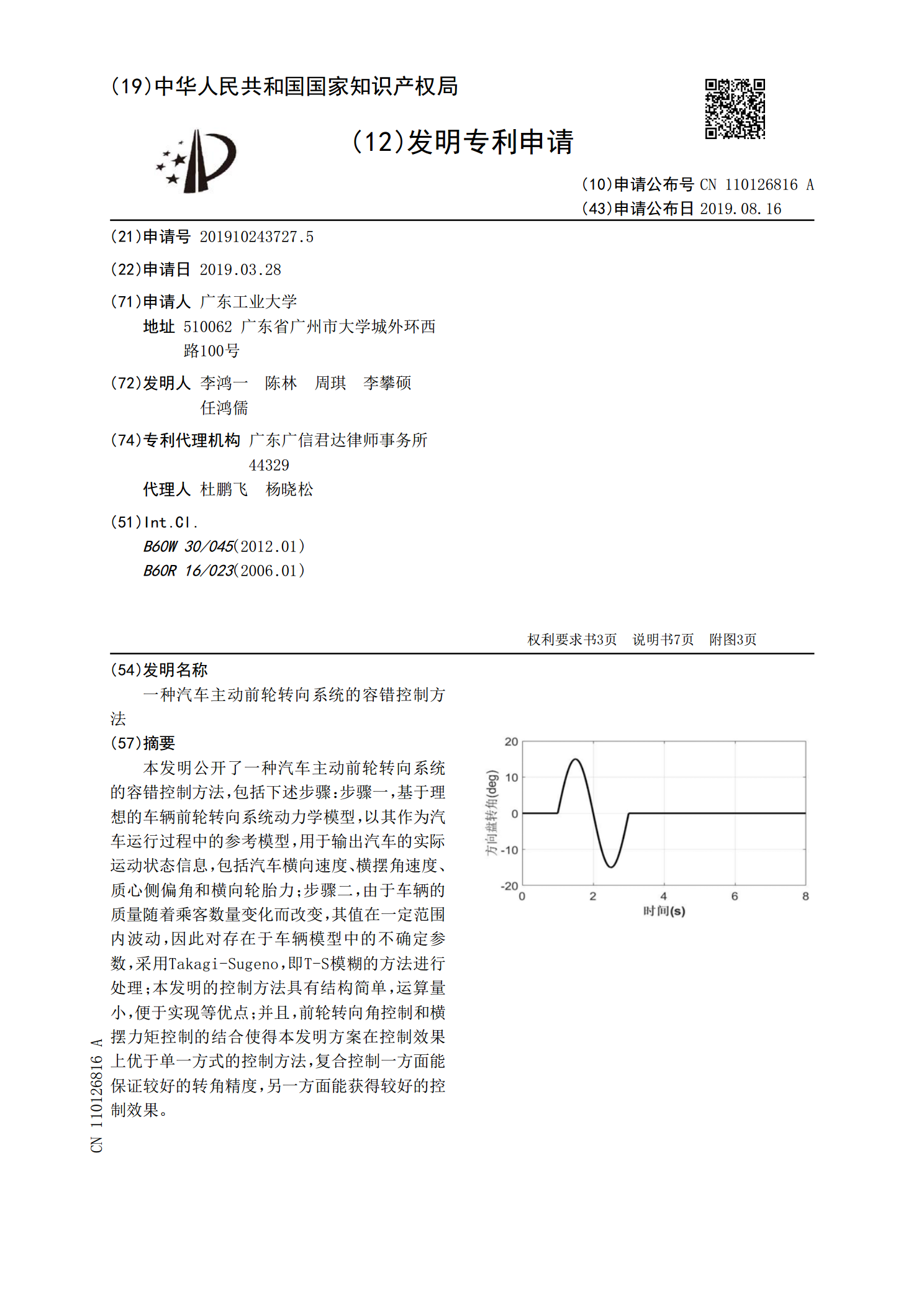
本发明公开了一种汽车主动前轮转向系统的容错控制方法,包括下述步骤:步骤一,基于理想的车辆前轮转向系统动力学模型,以其作为汽车运行过程中的参考模型,用于输出汽车的实际运动状态信息,包括汽车横向速度、横摆角速度、质心侧偏角和横向轮胎力;步骤二,由于车辆的质量随着乘客数量变化而改变,其值在一定范围内波动,因此对存在于车辆模型中的不确定参数,采用Takagi‑Sugeno,即T‑S模糊的方法进行处理;本发明的控制方法具有结构简单,运算量小,便于实现等优点;并且,前轮转向角控制和横摆力矩控制的结合使得本发明方案在控
一种用于线控转向汽车主动前轮转向控制系统的控制方法.pdf
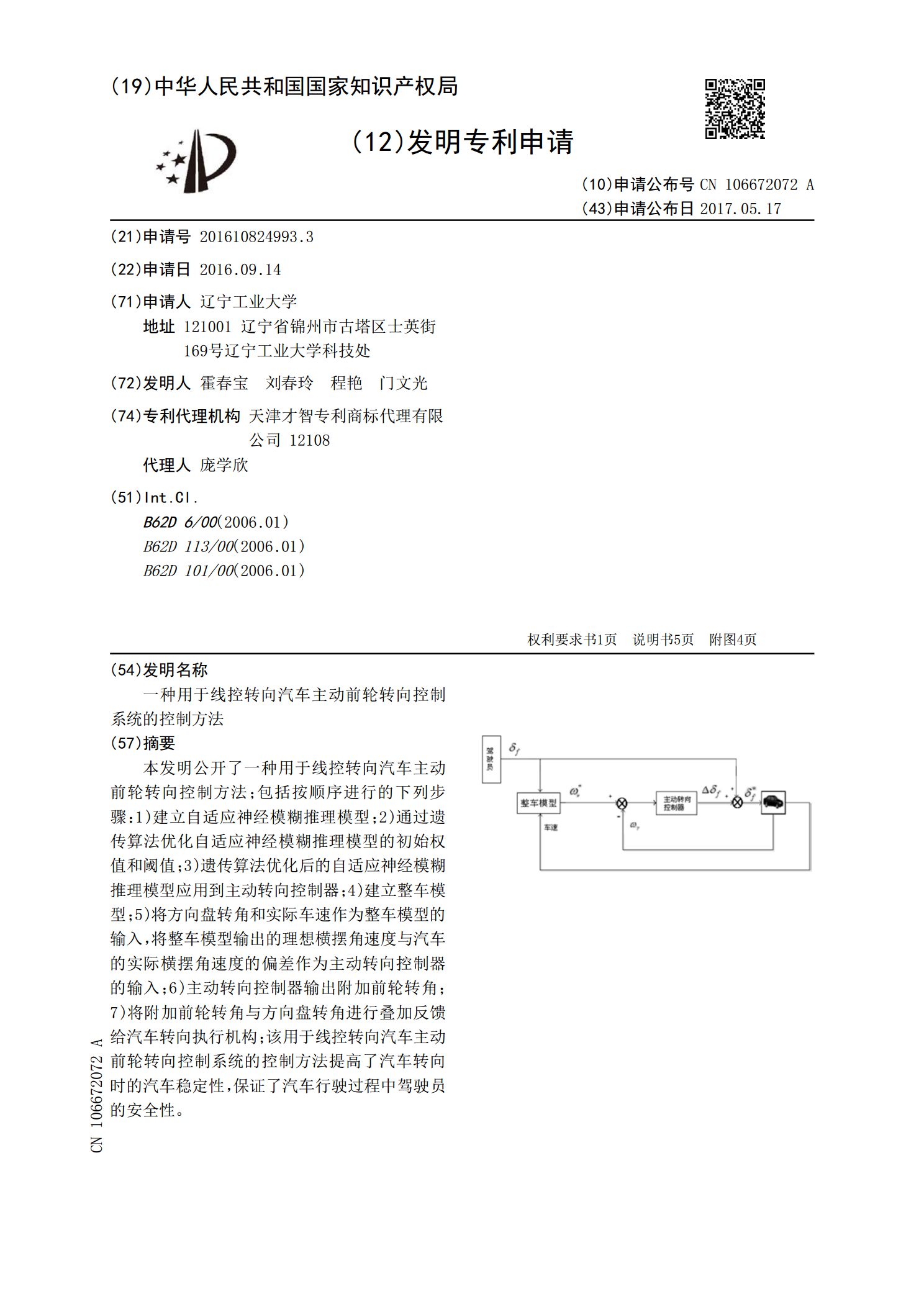
本发明公开了一种用于线控转向汽车主动前轮转向控制方法;包括按顺序进行的下列步骤:1)建立自适应神经模糊推理模型;2)通过遗传算法优化自适应神经模糊推理模型的初始权值和阈值;3)遗传算法优化后的自适应神经模糊推理模型应用到主动转向控制器;4)建立整车模型;5)将方向盘转角和实际车速作为整车模型的输入,将整车模型输出的理想横摆角速度与汽车的实际横摆角速度的偏差作为主动转向控制器的输入;6)主动转向控制器输出附加前轮转角;7)将附加前轮转角与方向盘转角进行叠加反馈给汽车转向执行机构;该用于线控转向汽车主动前轮转

线控转向系统前轮主动转向控制策略研究.docx
线控转向系统前轮主动转向控制策略研究线控转向系统前轮主动转向控制策略研究摘要:线控转向系统是一种通过电子控制增加或减少前轮转向角度,以提高汽车操控性和行驶稳定性的一种智能驾驶辅助系统。本文对线控转向系统的前轮主动转向控制策略进行了研究。通过分析传统转向系统的不足以及前轮主动转向系统的优势,提出了前轮主动转向系统的应用前景及控制策略的关键技术。研究结果表明,通过合理的控制策略,前轮主动转向系统能够有效改善汽车的操控性能和行驶稳定性,使驾驶体验更加舒适和安全。关键词:线控转向系统,前轮主动转向,控制策略,操控