
一种基于ILOPF的四旋翼姿态估计方法.pdf

一吃****仕龙


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于ILOPF的四旋翼姿态估计方法.pdf
本发明提供了一种基于ILOPF的四旋翼姿态估计方法,包括如下步骤:步骤S1:初始化粒子集,根据需要估计的状态的值域范围,随机生成N个采样点,组成粒子集;步骤S2:利用EKF方法对粒子集进行更新,将得到的近似后验密度作为重要性密度函数,最后产生新的粒子集;步骤S3:对所述步骤S2中产生的新的粒子集进行权值更新;步骤S4:依据区分阈值将权值更新后的粒子集划分为复制组和抛弃组,并分别归一化权值;步骤S5:采用轮盘赌方法对归一化权值后的复制组进行重采样,并得出本次估计的结果。本发明提高了粒子的多样性,满足了实时性

基于视觉标志检测的旋翼无人机姿态估计方法.docx
基于视觉标志检测的旋翼无人机姿态估计方法摘要:本文提出了一种基于视觉标志检测的旋翼无人机姿态估计方法。该方法通过在无人机上安装摄像头,利用视觉标志识别算法实时检测场景中的标志物,从而获取无人机当前的姿态信息。该方法具有快速、准确、实时响应等优点,为场景无人机导航和控制提供了新的方法和思路。关键词:旋翼无人机,姿态估计,视觉标志,检测算法1.引言旋翼无人机已经成为当前领域内的热点研究之一,其广泛应用于农业、灾害救援、环境监测等领域。在无人机的操作中,姿态控制是最基本的操作之一,旋翼无人机的姿态估计是其飞行的
一种多传感融合的四旋翼无人机姿态估计方法.pdf
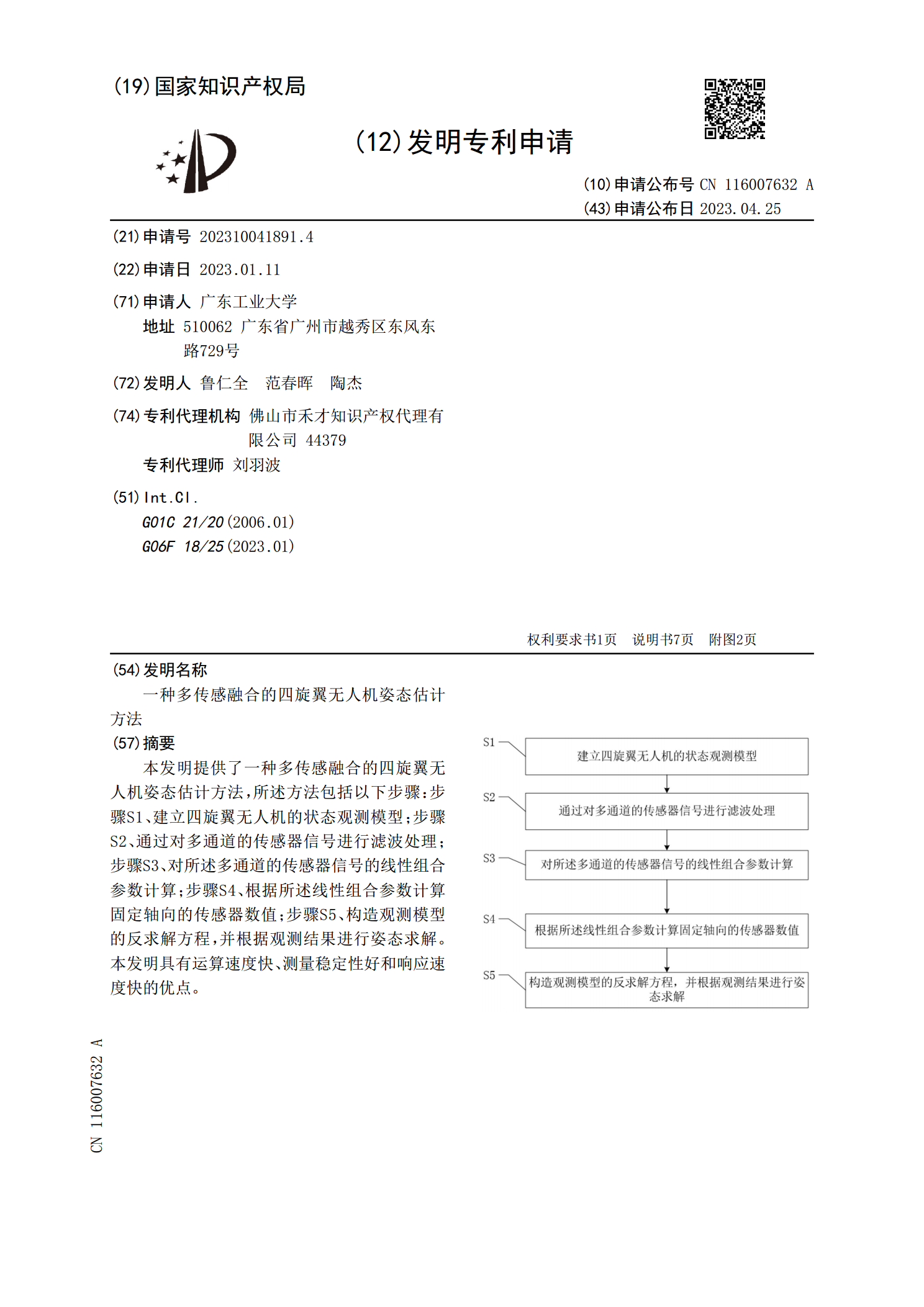
本发明提供了一种多传感融合的四旋翼无人机姿态估计方法,所述方法包括以下步骤:步骤S1、建立四旋翼无人机的状态观测模型;步骤S2、通过对多通道的传感器信号进行滤波处理;步骤S3、对所述多通道的传感器信号的线性组合参数计算;步骤S4、根据所述线性组合参数计算固定轴向的传感器数值;步骤S5、构造观测模型的反求解方程,并根据观测结果进行姿态求解。本发明具有运算速度快、测量稳定性好和响应速度快的优点。

基于姿态角估计的四旋翼飞行器多传感器故障诊断方法.docx
基于姿态角估计的四旋翼飞行器多传感器故障诊断方法标题:基于姿态角估计的四旋翼飞行器多传感器故障诊断方法摘要:四旋翼飞行器在航空领域具有广泛的应用前景。为确保四旋翼飞行器飞行的安全性和可靠性,传感器故障的诊断和修复变得尤为重要。本论文提出了一种基于姿态角估计的四旋翼飞行器多传感器故障诊断方法。首先进行姿态角估计,然后通过对比传感器读数和姿态角估计值之间的差异,检测和定位传感器故障。通过对多个传感器读数进行一致性检验,确定故障传感器的类型。通过实验验证,该方法能够有效地检测和定位传感器故障,并提供准确的故障诊
基于维度裁剪的PPO算法的四旋翼姿态轨迹控制方法.pdf
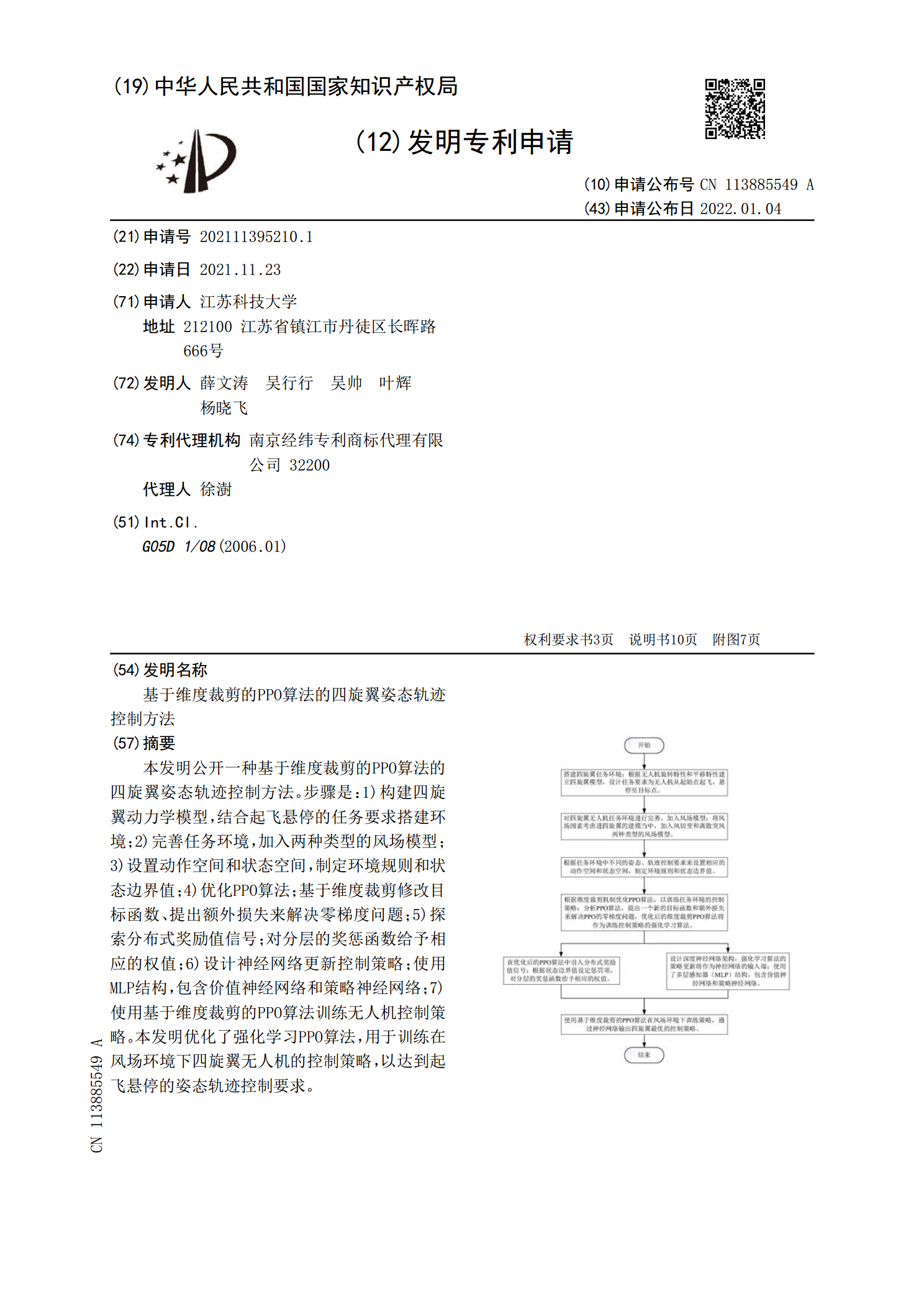
本发明公开一种基于维度裁剪的PPO算法的四旋翼姿态轨迹控制方法。步骤是:1)构建四旋翼动力学模型,结合起飞悬停的任务要求搭建环境;2)完善任务环境,加入两种类型的风场模型;3)设置动作空间和状态空间,制定环境规则和状态边界值;4)优化PPO算法;基于维度裁剪修改目标函数、提出额外损失来解决零梯度问题;5)探索分布式奖励值信号;对分层的奖惩函数给予相应的权值;6)设计神经网络更新控制策略;使用MLP结构,包含价值神经网络和策略神经网络;7)使用基于维度裁剪的PPO算法训练无人机控制策略。本发明优化了强化学习