
基于维度裁剪的PPO算法的四旋翼姿态轨迹控制方法.pdf

康佳****文库


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于维度裁剪的PPO算法的四旋翼姿态轨迹控制方法.pdf
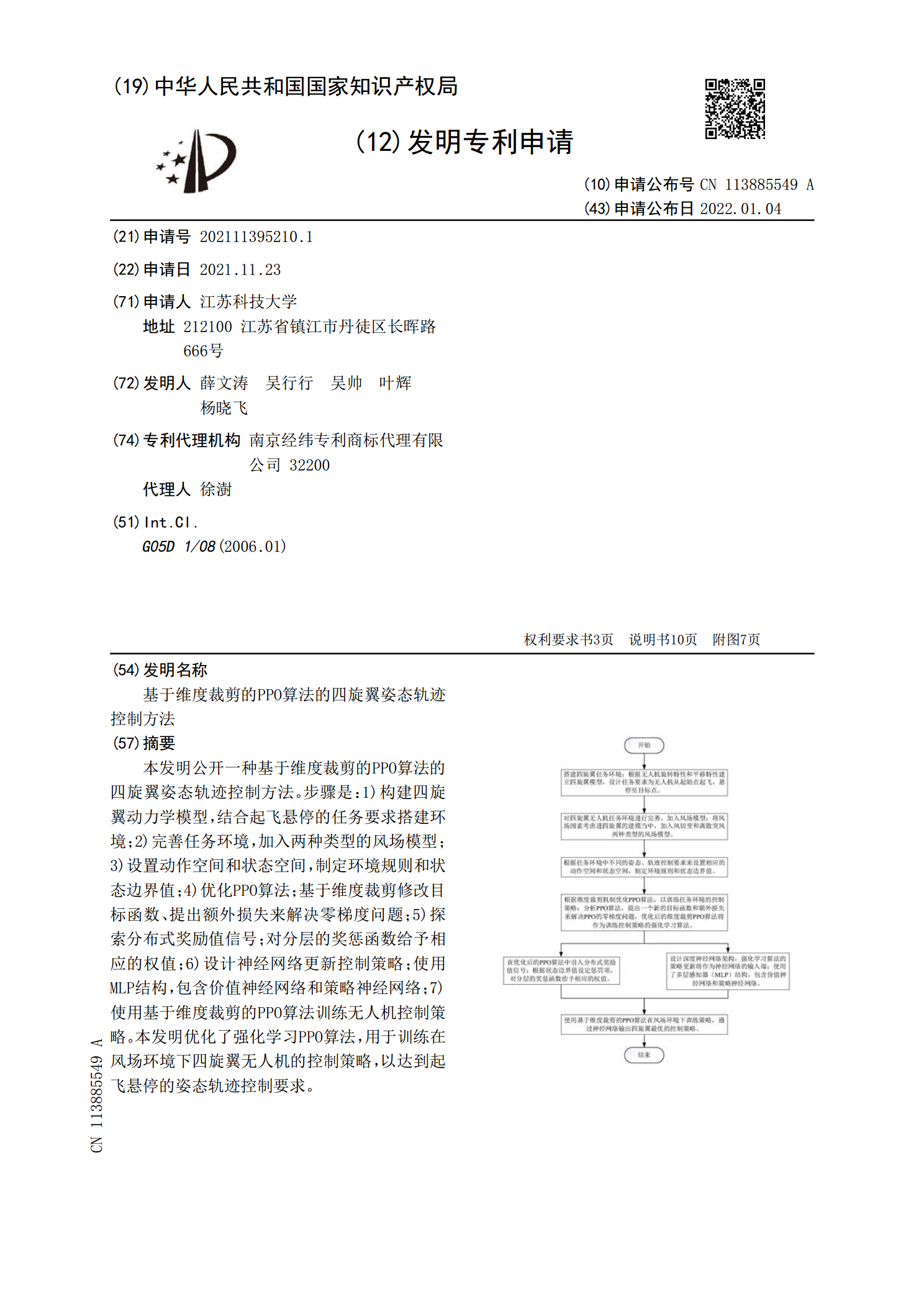
本发明公开一种基于维度裁剪的PPO算法的四旋翼姿态轨迹控制方法。步骤是:1)构建四旋翼动力学模型,结合起飞悬停的任务要求搭建环境;2)完善任务环境,加入两种类型的风场模型;3)设置动作空间和状态空间,制定环境规则和状态边界值;4)优化PPO算法;基于维度裁剪修改目标函数、提出额外损失来解决零梯度问题;5)探索分布式奖励值信号;对分层的奖惩函数给予相应的权值;6)设计神经网络更新控制策略;使用MLP结构,包含价值神经网络和策略神经网络;7)使用基于维度裁剪的PPO算法训练无人机控制策略。本发明优化了强化学习

基于四旋翼飞行器的姿态控制算法研究的开题报告.docx
基于四旋翼飞行器的姿态控制算法研究的开题报告一、选题背景分析随着机器人技术的不断更新与进步,四旋翼飞行器逐渐成为人们关注的热点之一。四旋翼飞行器因其小巧灵活、可操作性强、搭载载荷重量小等优点,被广泛应用于农业、资源勘探、环境监测、地质探测等领域。而四旋翼飞行器的核心部分——姿态控制系统的研究成为越来越多学者的研究热点之一。四旋翼飞行器姿态控制是指控制飞行器在三维空间内的姿态,使其按照预先设定的运动轨迹进行飞行。姿态控制的主要目的在于稳定飞行器,提高其飞行的精度和安全性。对于四旋翼飞行器而言,姿态控制涉及到

四旋翼飞行器的基于PID姿态控制算法的设计与实现.docx
四旋翼飞行器的基于PID姿态控制算法的设计与实现四旋翼飞行器的基于PID姿态控制算法的设计与实现摘要:随着无人机技术的快速发展,四旋翼飞行器作为一种常见的无人机类型,受到了广泛关注。姿态控制是四旋翼飞行器自主飞行的重要问题之一。本文主要介绍了基于PID(比例-积分-微分)姿态控制算法的设计与实现,该算法通过对四旋翼飞行器姿态误差进行反馈控制,实现飞行器的稳定悬停和精确控制。首先,介绍了四旋翼飞行器的结构和运动模型。然后,详细阐述了PID算法的原理和控制策略。最后,通过实际飞行实验验证了该算法的有效性和可行

基于四旋翼飞行器的姿态控制算法研究的任务书.docx
基于四旋翼飞行器的姿态控制算法研究的任务书任务书一、任务背景和意义四旋翼飞行器作为一种轻便灵活、操控简单、可在狭小空间内操作的无人机,广泛应用于农业、交通巡查、测绘、灾害救援、电视报道、全景拍摄等领域。然而,四旋翼飞行器自身的控制系统存在一定的难度,如如何控制飞行器姿态,以及如何控制飞行器稳定飞行等问题,需要进行深入研究和探讨。姿态控制是四旋翼飞行器控制系统的重要环节,其目标是以期望姿态为基准点,控制四旋翼飞行器朝着期望姿态飞行,同时控制其在飞行过程中保持稳定。因此,对于四旋翼飞行器姿态控制的研究,具有重

四旋翼姿态解算算法研究.docx
四旋翼姿态解算算法研究Title:ResearchonFour-RotorAttitudeCalculationAlgorithmAbstract:Inrecentyears,quadcoptershavegainedincreasingpopularityduetotheirmaneuverabilityandversatilityinvariousapplications.Accurateestimationofthequadcopter'sattitudeiscrucialforstableflig