
煤矿井下轮履复合式巡检清障机器人.pdf

小云****66

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
煤矿井下轮履复合式巡检清障机器人.pdf
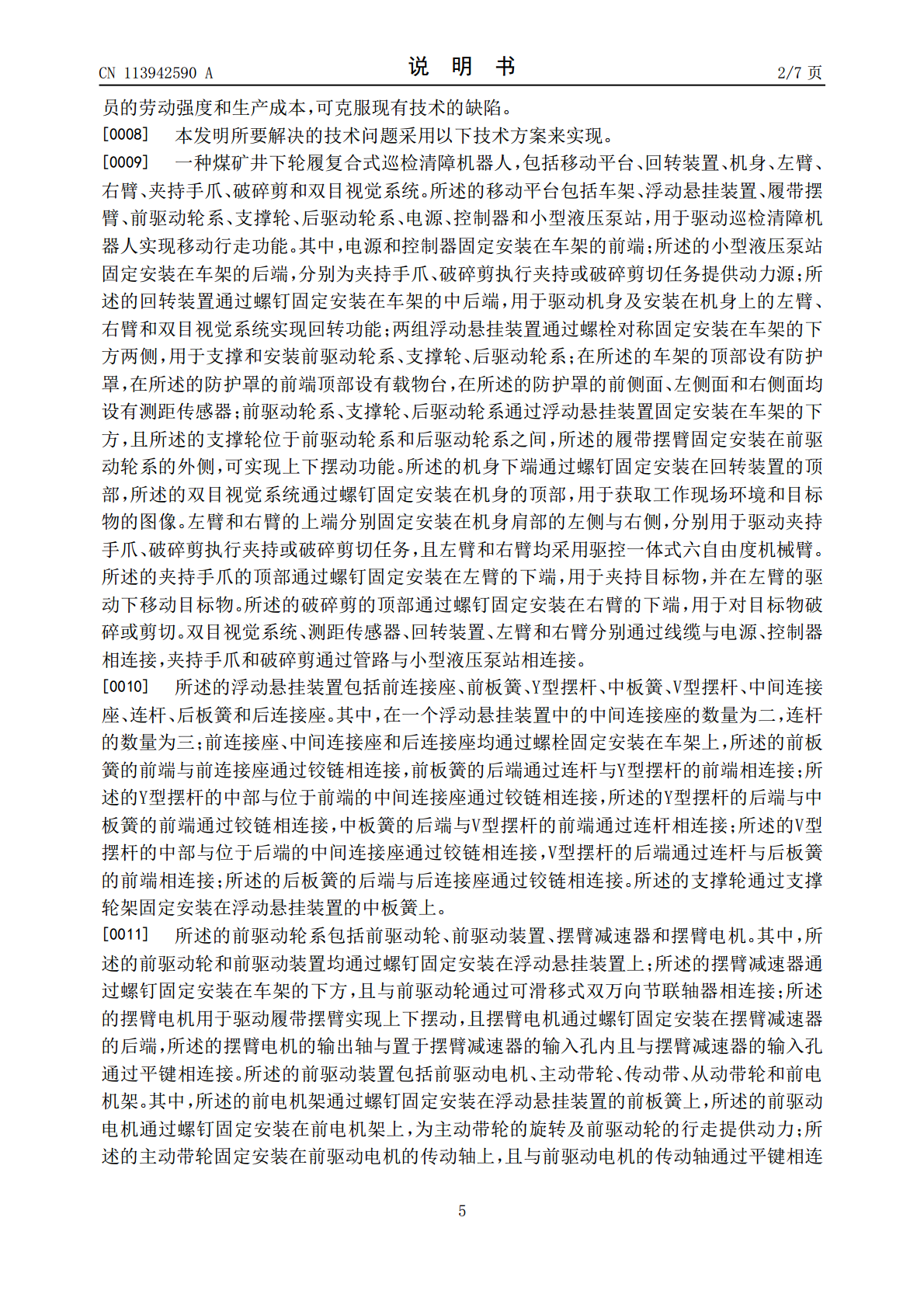
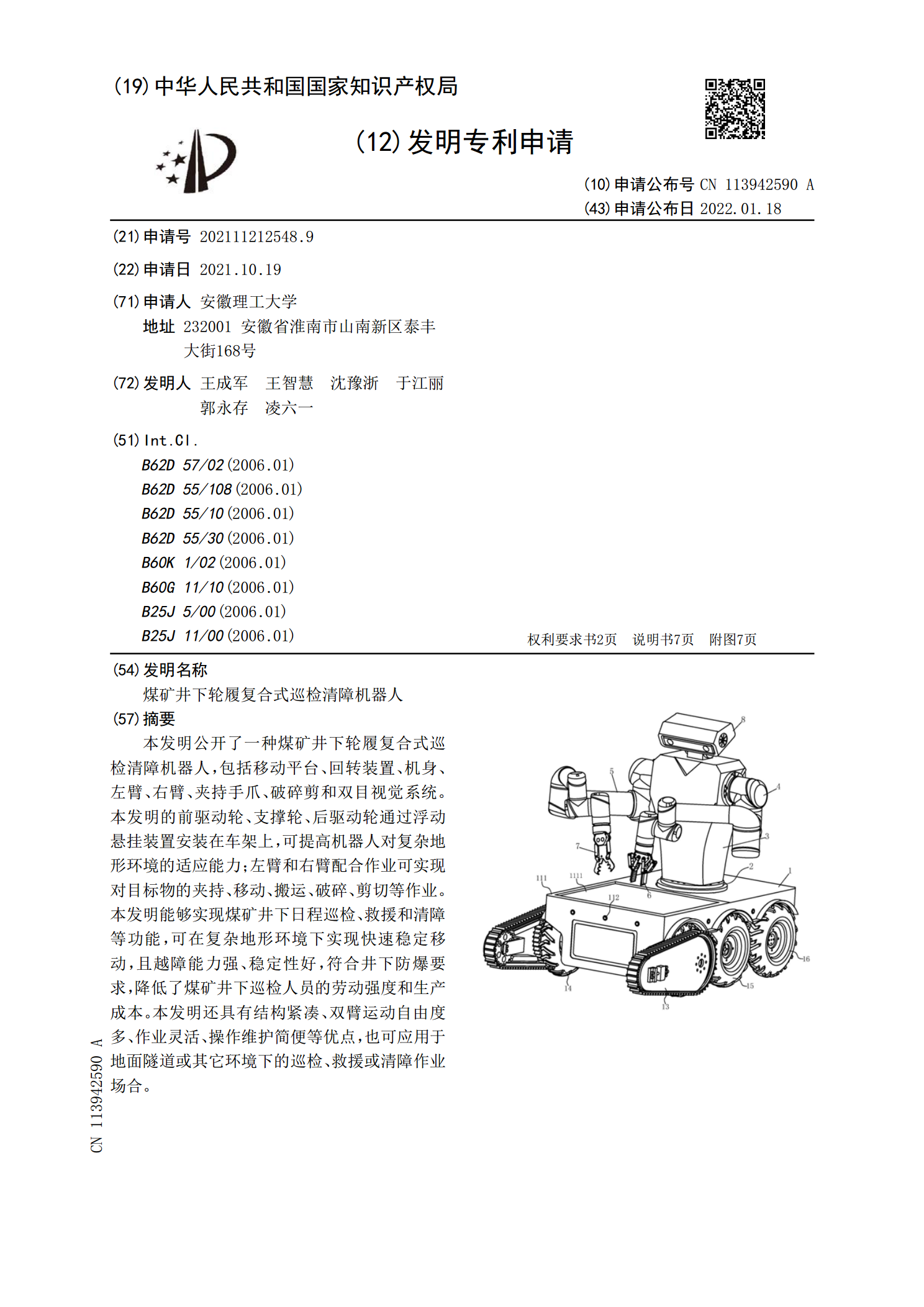
本发明公开了一种煤矿井下轮履复合式巡检清障机器人,包括移动平台、回转装置、机身、左臂、右臂、夹持手爪、破碎剪和双目视觉系统。本发明的前驱动轮、支撑轮、后驱动轮通过浮动悬挂装置安装在车架上,可提高机器人对复杂地形环境的适应能力;左臂和右臂配合作业可实现对目标物的夹持、移动、搬运、破碎、剪切等作业。本发明能够实现煤矿井下日程巡检、救援和清障等功能,可在复杂地形环境下实现快速稳定移动,且越障能力强、稳定性好,符合井下防爆要求,降低了煤矿井下巡检人员的劳动强度和生产成本。本发明还具有结构紧凑、双臂运动自由度多、作

轮履复合式巡检机器人机械系统研究.docx
轮履复合式巡检机器人机械系统研究论文标题:轮履复合式巡检机器人机械系统研究摘要:随着工业智能化的不断推进,机器人在工业领域中发挥着越来越重要的作用。轮履复合式巡检机器人是一种新型智能机器人,其具备轮式和履带式两种行走模式,能够在不同地形环境中实施巡检任务。本文旨在研究轮履复合式巡检机器人的机械系统,通过分析其结构和工作原理,优化设计以提升巡检效率和性能。实验结果表明,轮履复合式巡检机器人具备较好的行走性能和适应能力,适用于多种工业环境。关键词:轮履复合式机器人;巡检;机械系统;行走性能;适应能力第1节引言

轮履复合式巡检机器人行走机构及其工作方法.pdf
本发明公开了一种轮履复合式巡检机器人行走机构,它是在主体履带机构前部还安装有摆臂履带机构和行走轮机构;其中摆臂履带机构由安装在主体履带机构架体上的摆臂轴和摆臂电机以及安装在摆臂轴两端的左、右履带臂组成,摆臂电机通过摆臂减速器驱动摆臂轴转动,摆臂轴带动左、右履带臂上下摆动;行走轮机构,包括安装在主体履带机构底面中心线上的万向轮和左、右行走轮,构成三轮的行走方式。本发明采用新型轮履复合式移动机构,可以实现完全独立的履带移动和轮式移动,且两种运动方式互不干扰,充分发挥了轮式移动的灵活性和履带式移动的越障性能强等

煤矿井下巡检机器人技术及应用.pptx
汇报人:目录PARTONEPARTTWO技术原理技术特点技术优势技术发展趋势PARTTHREE应用场景应用效果应用案例应用前景PARTFOUR提高工作效率保障人员安全降低运营成本促进智能化转型PARTFIVE技术瓶颈成本问题推广难度解决方案与建议THANKYOU
一种煤矿井下巡检机器人.pdf
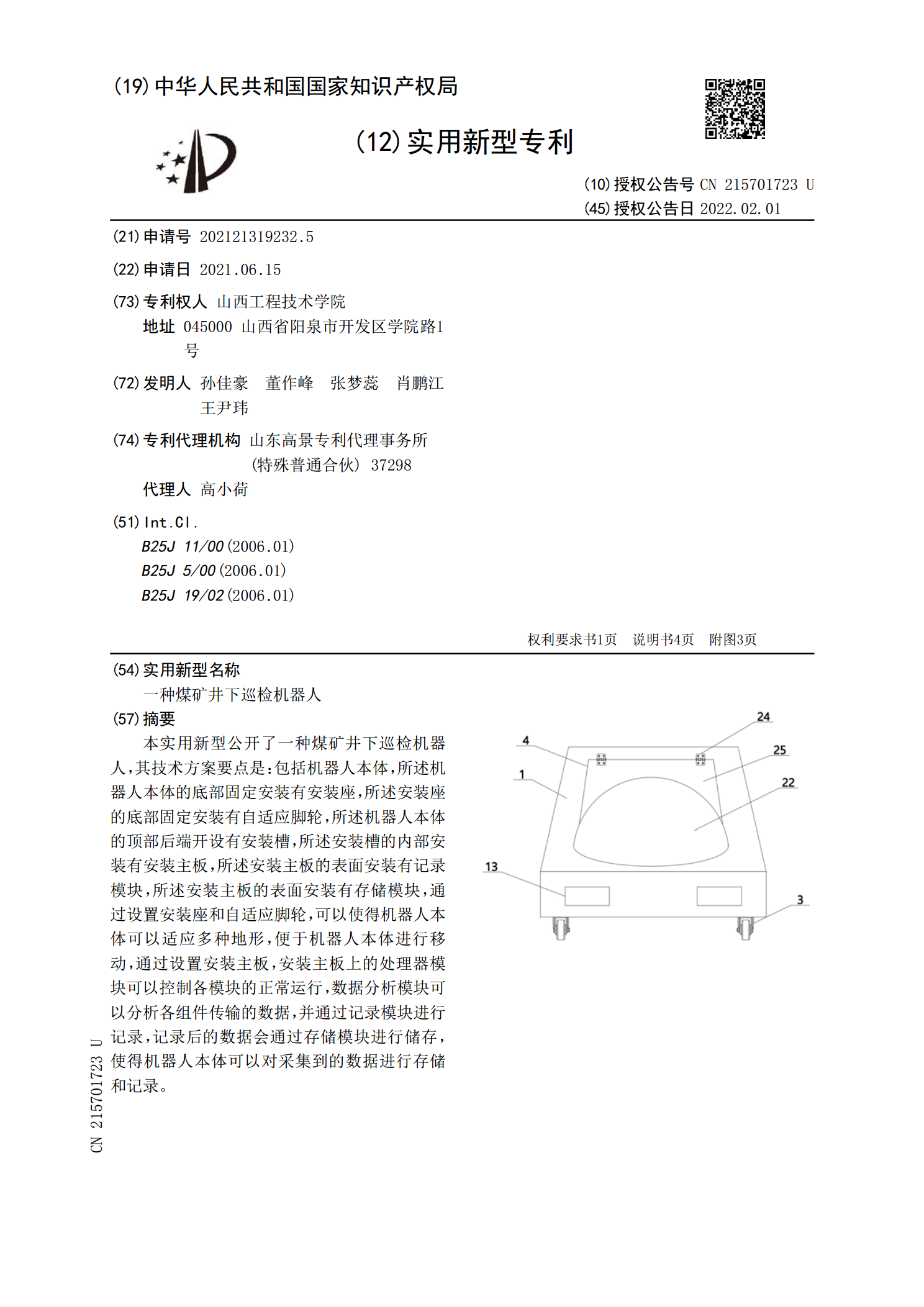
本实用新型公开了一种煤矿井下巡检机器人,其技术方案要点是:包括机器人本体,所述机器人本体的底部固定安装有安装座,所述安装座的底部固定安装有自适应脚轮,所述机器人本体的顶部后端开设有安装槽,所述安装槽的内部安装有安装主板,所述安装主板的表面安装有记录模块,所述安装主板的表面安装有存储模块,通过设置安装座和自适应脚轮,可以使得机器人本体可以适应多种地形,便于机器人本体进行移动,通过设置安装主板,安装主板上的处理器模块可以控制各模块的正常运行,数据分析模块可以分析各组件传输的数据,并通过记录模块进行记录,记录后