
永磁轮式爬壁微机器人尺寸优化设计研究.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

永磁轮式爬壁微机器人尺寸优化设计研究.docx
永磁轮式爬壁微机器人尺寸优化设计研究永磁轮式爬壁微机器人是一种在复杂壁面上进行高效任务的智能化设备。该机器人具有很强的粘附性能和轻量化的特点,适用于各种壁面上的检测、监控、清扫、维修以及其他任务。在实际应用中,永磁轮式爬壁微机器人尺寸对其运动控制、通信搭载和任务执行等方面都有很大影响。因此,本文重点研究永磁轮式爬壁微机器人尺寸优化设计。首先,永磁轮式爬壁微机器人的尺寸设计需要遵循一定的原则。机器人尺寸大小直接关系到其在壁面上的粘附牢固性以及在狭小空间中的活动和操作能力。因此,尺寸设计需要考虑机器人的结构刚
永磁轮式爬壁机器人.pdf
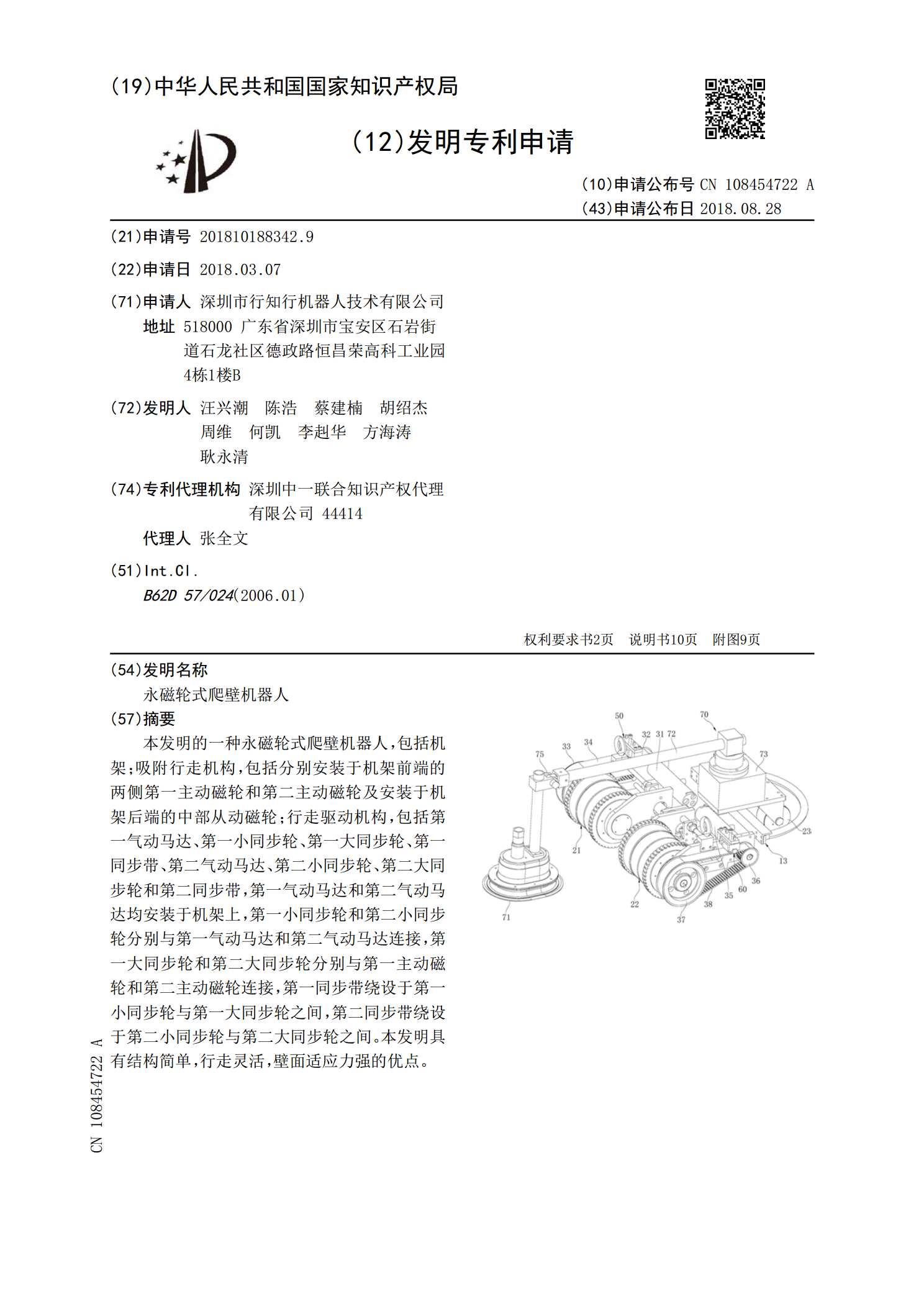
本发明的一种永磁轮式爬壁机器人,包括机架;吸附行走机构,包括分别安装于机架前端的两侧第一主动磁轮和第二主动磁轮及安装于机架后端的中部从动磁轮;行走驱动机构,包括第一气动马达、第一小同步轮、第一大同步轮、第一同步带、第二气动马达、第二小同步轮、第二大同步轮和第二同步带,第一气动马达和第二气动马达均安装于机架上,第一小同步轮和第二小同步轮分别与第一气动马达和第二气动马达连接,第一大同步轮和第二大同步轮分别与第一主动磁轮和第二主动磁轮连接,第一同步带绕设于第一小同步轮与第一大同步轮之间,第二同步带绕设于第二小同
永磁吸附式轮式爬壁机器人.pdf
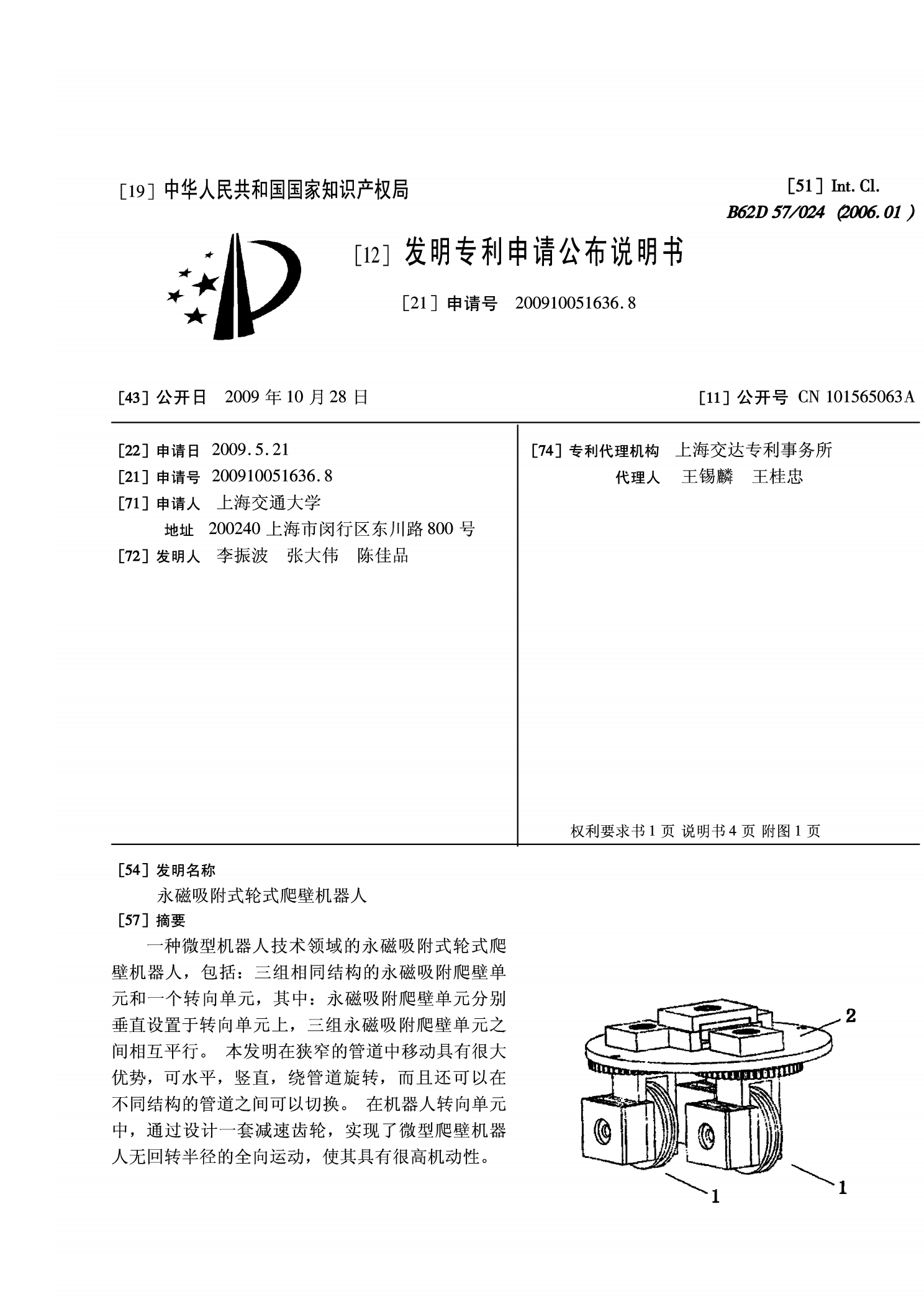
一种微型机器人技术领域的永磁吸附式轮式爬壁机器人,包括:三组相同结构的永磁吸附爬壁单元和一个转向单元,其中:永磁吸附爬壁单元分别垂直设置于转向单元上,三组永磁吸附爬壁单元之间相互平行。本发明在狭窄的管道中移动具有很大优势,可水平,竖直,绕管道旋转,而且还可以在不同结构的管道之间可以切换。在机器人转向单元中,通过设计一套减速齿轮,实现了微型爬壁机器人无回转半径的全向运动,使其具有很高机动性。

可变磁力永磁轮式爬壁机器人的研究的中期报告.docx
可变磁力永磁轮式爬壁机器人的研究的中期报告一、研究背景和意义随着科学技术的不断发展,机器人技术已经在许多领域得到广泛应用,如工业生产、医疗卫生、环境监测等。在特定场合,如高空、深海、危险环境等,机器人可以发挥不可替代的作用。爬壁机器人是其中一类应用广泛的机器人,其可以在垂直墙壁进行自主运动,大大提高了工作效率和安全性。可变磁力永磁轮式爬壁机器人是一种新型的爬壁机器人,它通过调整磁力大小和分布,实现了对机器人的运动轨迹和速度的控制。该机器人的应用范围广泛,可用于建筑物、桥梁、航空器等高处的检测和维修、核电站

可变磁力永磁轮式爬壁机器人的研究的任务书.docx
可变磁力永磁轮式爬壁机器人的研究的任务书任务书一、项目背景和意义随着科技的发展和社会的进步,机器人产业得到了快速的发展。机器人越来越广泛地应用于各个领域,例如制造业、医疗、服务业、农业、建筑等。机器人的出现代替了人类在一些重复性、危险性高、精密度高等作业领域的工作,提高了效率,减少了安全隐患,降低了成本。然而,机器人在特定环境下的作业仍然存在限制。例如,建筑施工中的高空施工、桥梁维修、高楼外观清洗等工作,需要跨越高空或爬行在陡峭的墙壁上,对机器人的技术和能力提出了更高的要求。针对这一需求,可变磁力永磁轮式