
永磁轮式爬壁机器人.pdf

静芙****可爱

1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
永磁轮式爬壁机器人.pdf
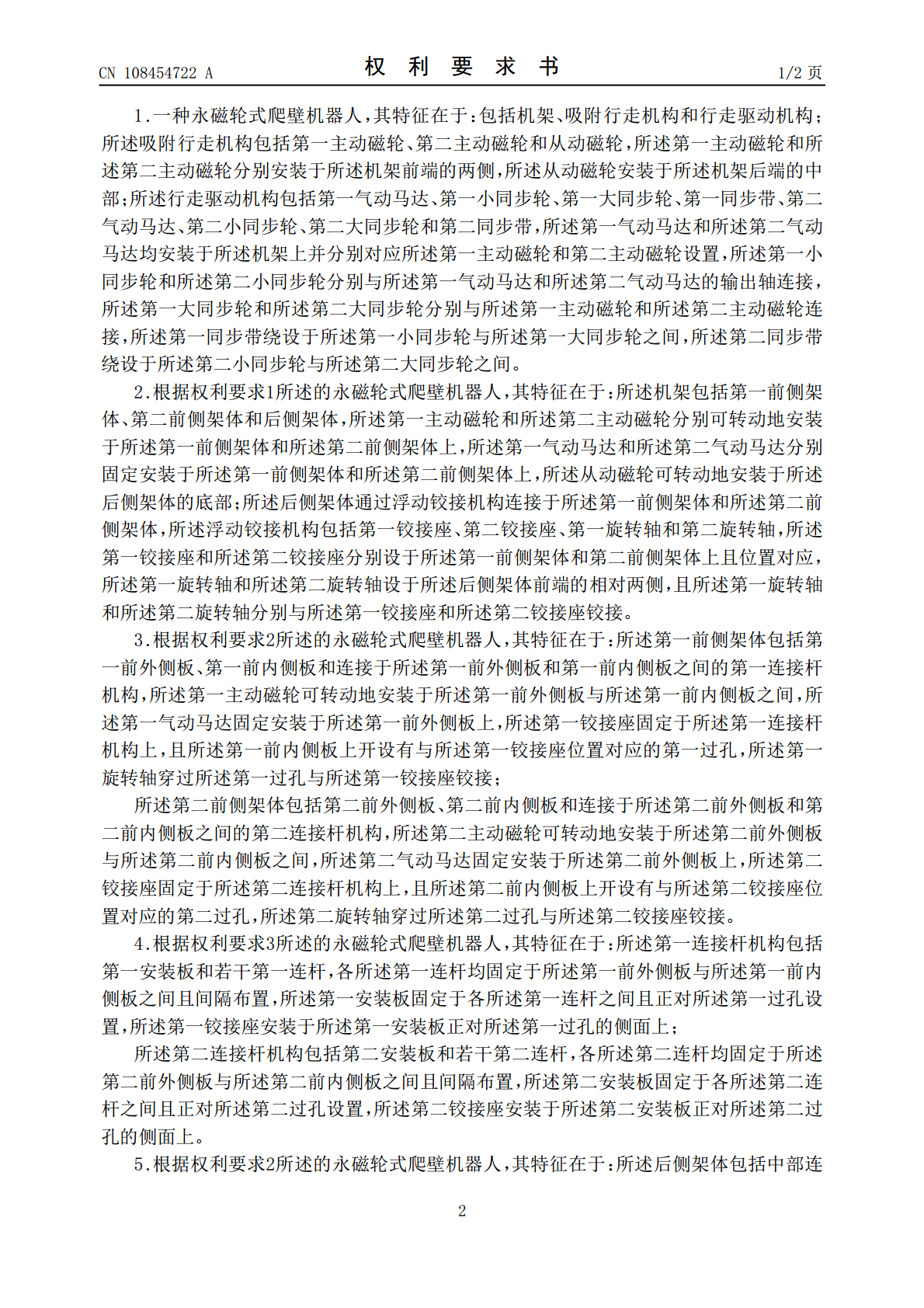
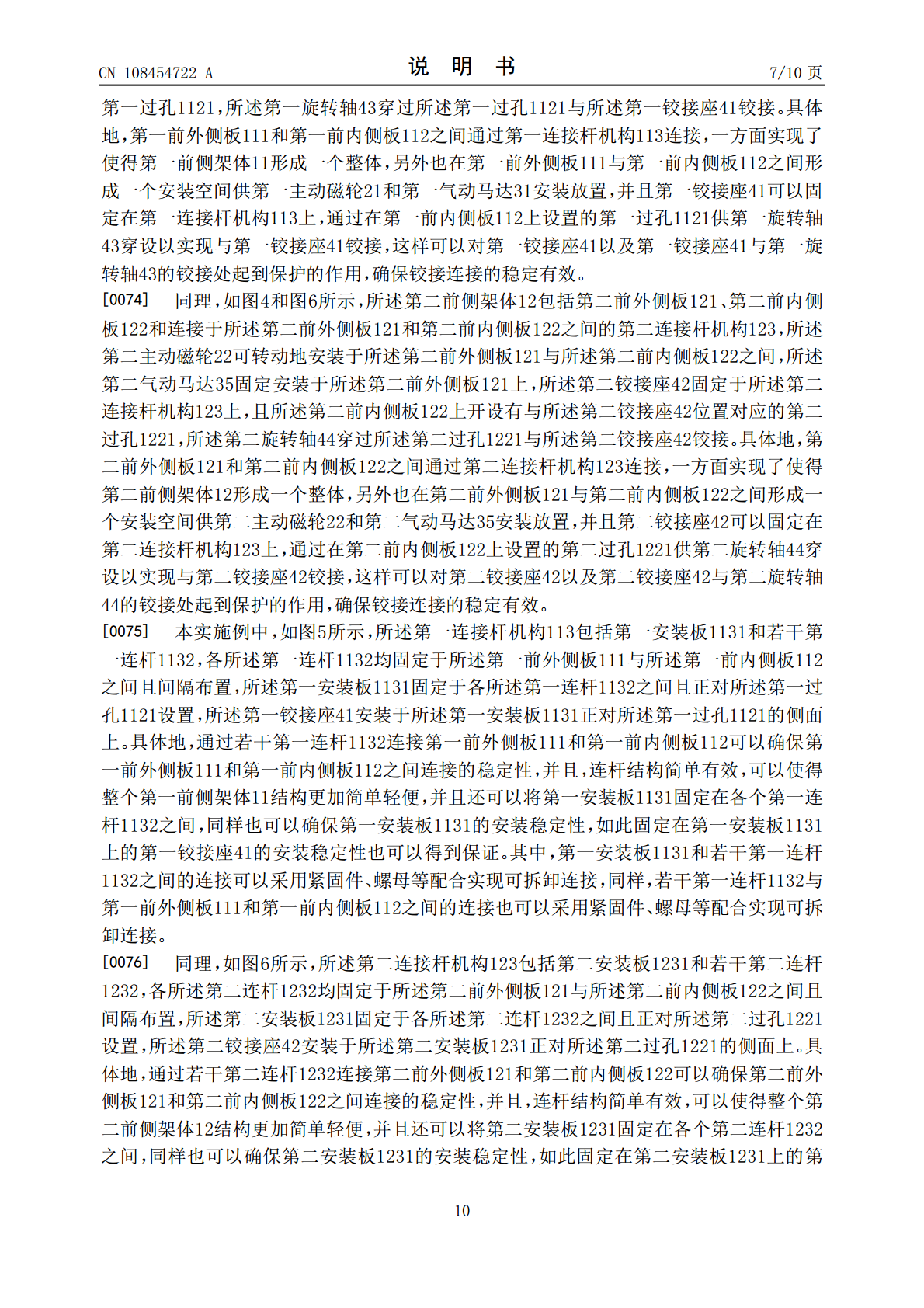
本发明的一种永磁轮式爬壁机器人,包括机架;吸附行走机构,包括分别安装于机架前端的两侧第一主动磁轮和第二主动磁轮及安装于机架后端的中部从动磁轮;行走驱动机构,包括第一气动马达、第一小同步轮、第一大同步轮、第一同步带、第二气动马达、第二小同步轮、第二大同步轮和第二同步带,第一气动马达和第二气动马达均安装于机架上,第一小同步轮和第二小同步轮分别与第一气动马达和第二气动马达连接,第一大同步轮和第二大同步轮分别与第一主动磁轮和第二主动磁轮连接,第一同步带绕设于第一小同步轮与第一大同步轮之间,第二同步带绕设于第二小同
永磁吸附式轮式爬壁机器人.pdf
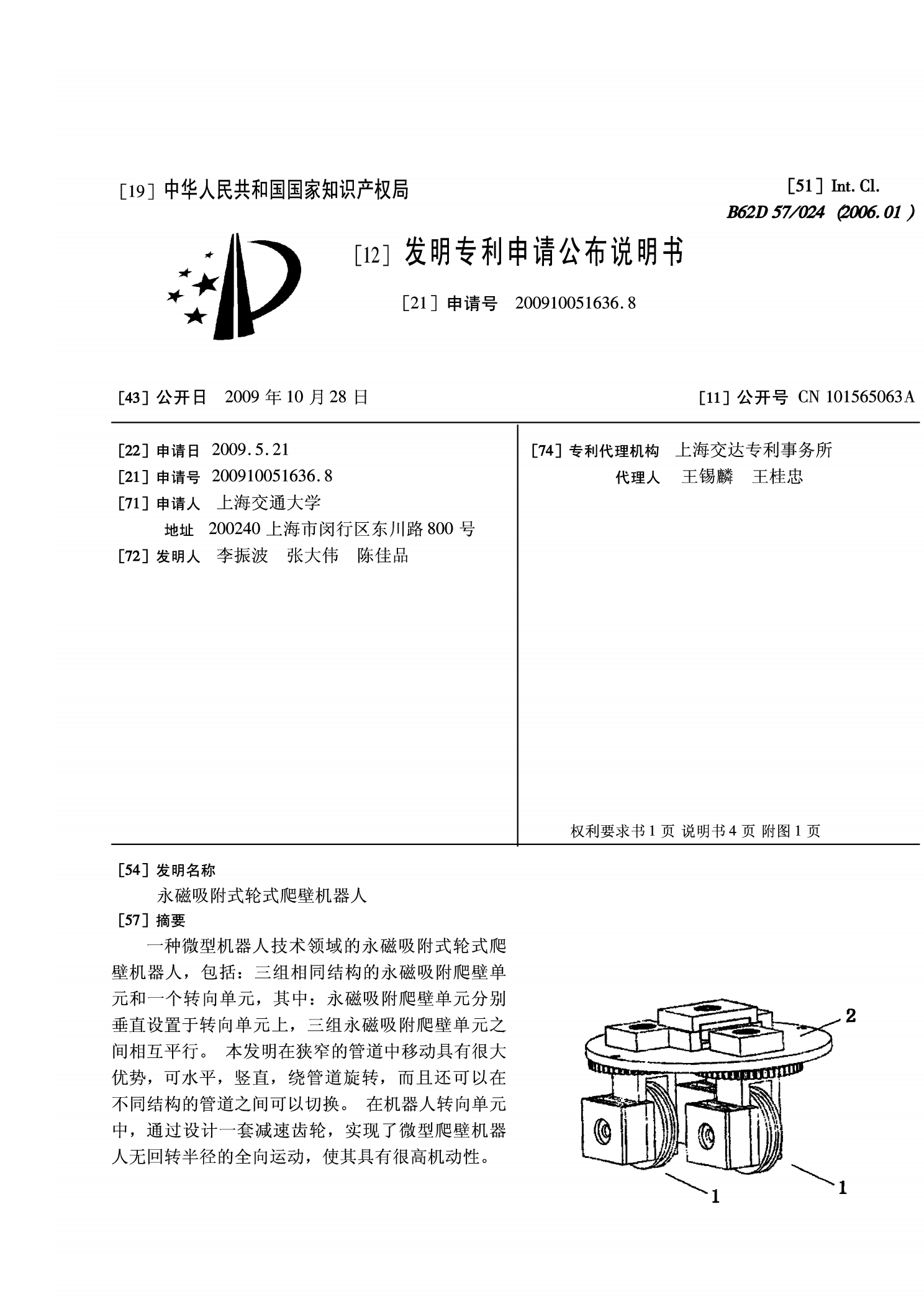
一种微型机器人技术领域的永磁吸附式轮式爬壁机器人,包括:三组相同结构的永磁吸附爬壁单元和一个转向单元,其中:永磁吸附爬壁单元分别垂直设置于转向单元上,三组永磁吸附爬壁单元之间相互平行。本发明在狭窄的管道中移动具有很大优势,可水平,竖直,绕管道旋转,而且还可以在不同结构的管道之间可以切换。在机器人转向单元中,通过设计一套减速齿轮,实现了微型爬壁机器人无回转半径的全向运动,使其具有很高机动性。

可变磁力永磁轮式爬壁机器人的研究的中期报告.docx
可变磁力永磁轮式爬壁机器人的研究的中期报告一、研究背景和意义随着科学技术的不断发展,机器人技术已经在许多领域得到广泛应用,如工业生产、医疗卫生、环境监测等。在特定场合,如高空、深海、危险环境等,机器人可以发挥不可替代的作用。爬壁机器人是其中一类应用广泛的机器人,其可以在垂直墙壁进行自主运动,大大提高了工作效率和安全性。可变磁力永磁轮式爬壁机器人是一种新型的爬壁机器人,它通过调整磁力大小和分布,实现了对机器人的运动轨迹和速度的控制。该机器人的应用范围广泛,可用于建筑物、桥梁、航空器等高处的检测和维修、核电站

轮式越障爬壁机器人.pdf
一种机器人技术领域的轮式越障爬壁机器人,包括:机器人车架、三组移动吸附机构及其对应的直线滑轨、丝杠及驱动电机,三组直线滑轨以及丝杠竖直设置于机器人车架下方且两端分别与机器人车架及移动吸附机构相连,驱动电机与移动吸附机构固定连接。本发明解决现有爬壁机器人在垂直壁面作业时存在的问题,机器人既具有轮式移动机器人速度快和转向灵活、履带式移动机器人磁吸附力大的特点,同时还具有好的越障能力,能满足在复杂环境中运动和作业的需求。

类轮式爬壁机器人.pdf
本发明公开了一种类轮式爬壁机器人,包括机体,在所述机体的尾端设有平衡装置,在所述机体的左右两侧设有对称布置的类轮结构,每个所述类轮结构均安装在一驱动轴上,所述驱动轴安装在所述机体上;所述类轮结构设有套装在对应所述驱动轴上的轮轴座和周向均布固定在所述轮轴座上的3~5个轮辐,所述轮辐采用弧形曲面结构,且在所述弧形曲面结构的外侧设有吸附结构,所述吸附结构与墙面的接触面积大于所述轮辐与所述吸附结构的接触面积,相邻的两个所述轮辐之间设有跨距。本发明运动速度快、越障能力强、接触面积大、吸附性强。