
基于Arduino的智能无人轮式系统.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于Arduino的智能无人轮式系统.docx
基于Arduino的智能无人轮式系统基于Arduino的智能无人轮式系统摘要:本论文提出了一种基于Arduino的智能无人轮式系统的设计和实现方法。该系统具有自主导航、避障能力以及远程控制等功能。通过使用Arduino开发板和相关传感器,实现了系统的高效运行和精确控制。同时,通过使用无线通信模块和搭建用户界面,实现了对系统的远程监控和控制。经过实际测试,该系统表现出了良好的性能和稳定性。1.引言无人车辆是未来交通中的重要组成部分,其具有许多优势,如减少交通事故、提高交通效率等。然而,无人车辆系统的设计和实
基于arduino的无人智能送货车.pdf
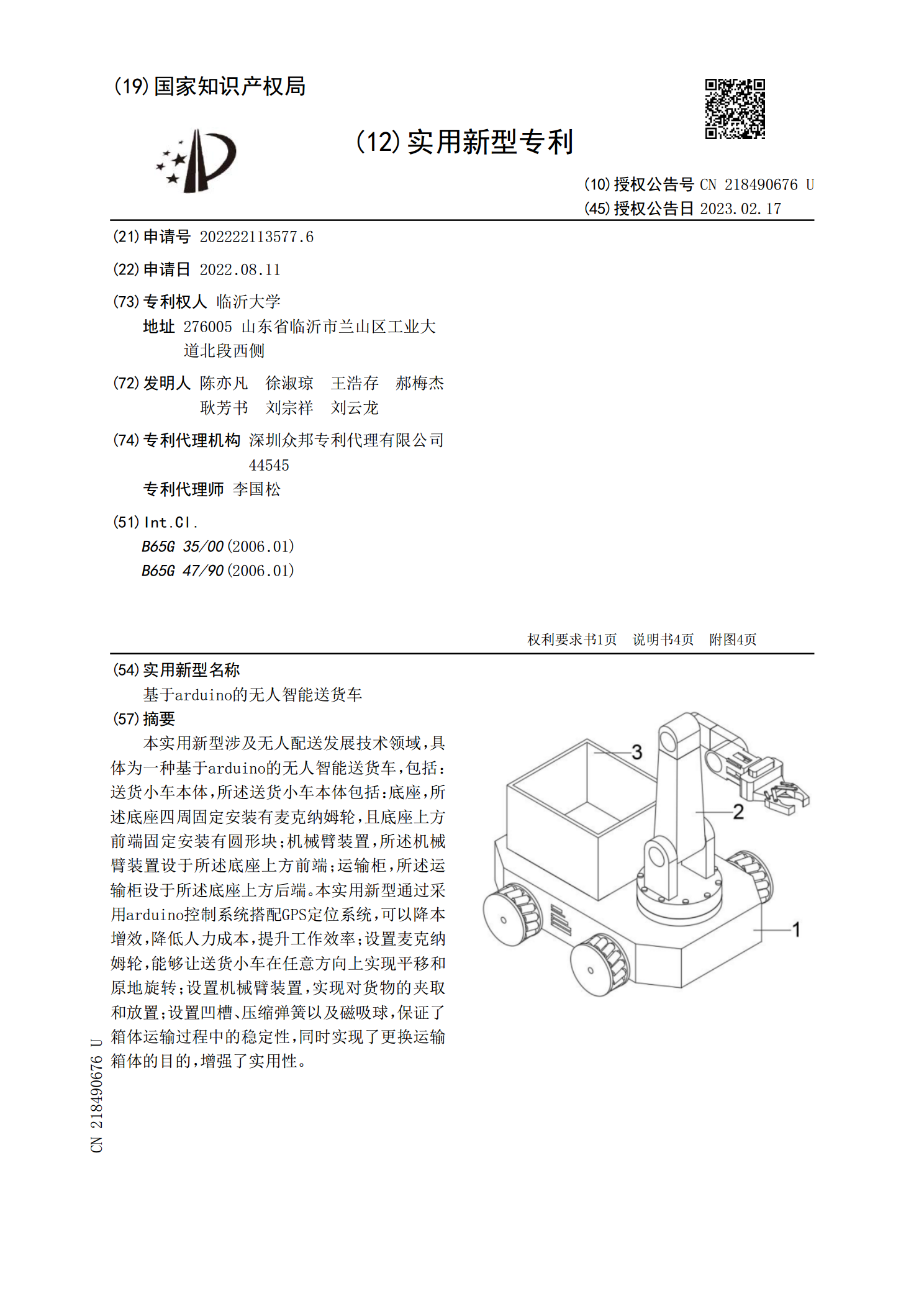
本实用新型涉及无人配送发展技术领域,具体为一种基于arduino的无人智能送货车,包括:送货小车本体,所述送货小车本体包括:底座,所述底座四周固定安装有麦克纳姆轮,且底座上方前端固定安装有圆形块;机械臂装置,所述机械臂装置设于所述底座上方前端;运输柜,所述运输柜设于所述底座上方后端。本实用新型通过采用arduino控制系统搭配GPS定位系统,可以降本增效,降低人力成本,提升工作效率;设置麦克纳姆轮,能够让送货小车在任意方向上实现平移和原地旋转;设置机械臂装置,实现对货物的夹取和放置;设置凹槽、压缩弹簧以及

基于arduino的智能门禁系统.docx
基于arduino的智能门禁系统智能门禁系统是指利用现代科技手段,结合门禁控制技术、人脸识别技术、无线通信技术等,实现对门禁进出的智能化管理和控制的一种系统。该系统能够提高门禁安全性,提升用户体验,方便管理人员的管理工作,并且可以与其他信息系统进行对接,实现更多的功能。Arduino是一种基于开源电路板的简单易用的开发平台,以其丰富的扩展模块和友好的编程环境很受爱好者的喜爱。基于Arduino的智能门禁系统结合了Arduino的优势和门禁系统的需求,有着广泛的应用前景。首先,智能门禁系统基于Arduino

基于Arduino的智能导盲系统.docx
基于Arduino的智能导盲系统梁灿杰杨馥彰林楷涛陈俊填万智萍摘要:随着科学技术不断发展革新,社会对盲人关注不断提高,针对全球盲人数量众多,关爱的角度出發,该文基于Arduino和STM32F429IGT6芯片作为核心控制模块,GPS模块和远程终端APP能够令家人实时跟踪确定盲人的准确起始位置和目的地。在规划行走路线所感知的障碍物上,我们使用HC-SR04超声波测距模块和蜂鸣器有机结合来令盲人知道前方有障碍物,通过SIM900A模块来实现一键拨号,及时联系家人。盲人的日常生活需要借助其他工具的感知与判断周

基于Arduino技术的智能家庭系统.docx
基于Arduino技术的智能家庭系统智能家居系统随着人类生活水平的提高而越来越受到人们的关注。我们现在生活的家居设施不仅仅是桌椅床,还有各式各样的电器,如电视、空调、烤箱、灯具、音响、智能锁以及各种安防设备等等。开发一个具有实用性和高可靠性的智能家居系统是目前智能家居行业的热点之一。本文提出了一种基于Arduino技术的智能家居系统,该系统旨在解决传统家居缺乏集成化管理的问题,提供一个高效、便捷、安全、智能化的家居环境,满足现代家庭的实际需求。1.智能家居系统的概述智能家居系统是指通过信息技术和网络通信技