
一种新型全控式自平衡爬楼车的设计与研究.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种新型全控式自平衡爬楼车的设计与研究.docx
一种新型全控式自平衡爬楼车的设计与研究随着城市化进程的加速,城市高楼大厦井喷式的增多,人们需要越来越多的方式来方便、快速地上下楼。传统的楼梯和电梯不断地被人们利用,但局限性也逐渐显现,楼梯不仅耗费体力,而且容易受到人流量的限制;而电梯虽然能够减轻人们的体力负担,但深受拥挤、等待时间长和事故频发等问题的困扰。因此,基于人们迫切需要新型爬楼工具的需求,全控式自平衡爬楼车应运而生。一、自平衡爬楼车原理自平衡爬楼车首先是通过自平衡的原理来运作的。其核心部分是一组高精度传感器与单片机控制器的相互协调,传感器能通过检
一种爬楼自平衡购物车.pdf
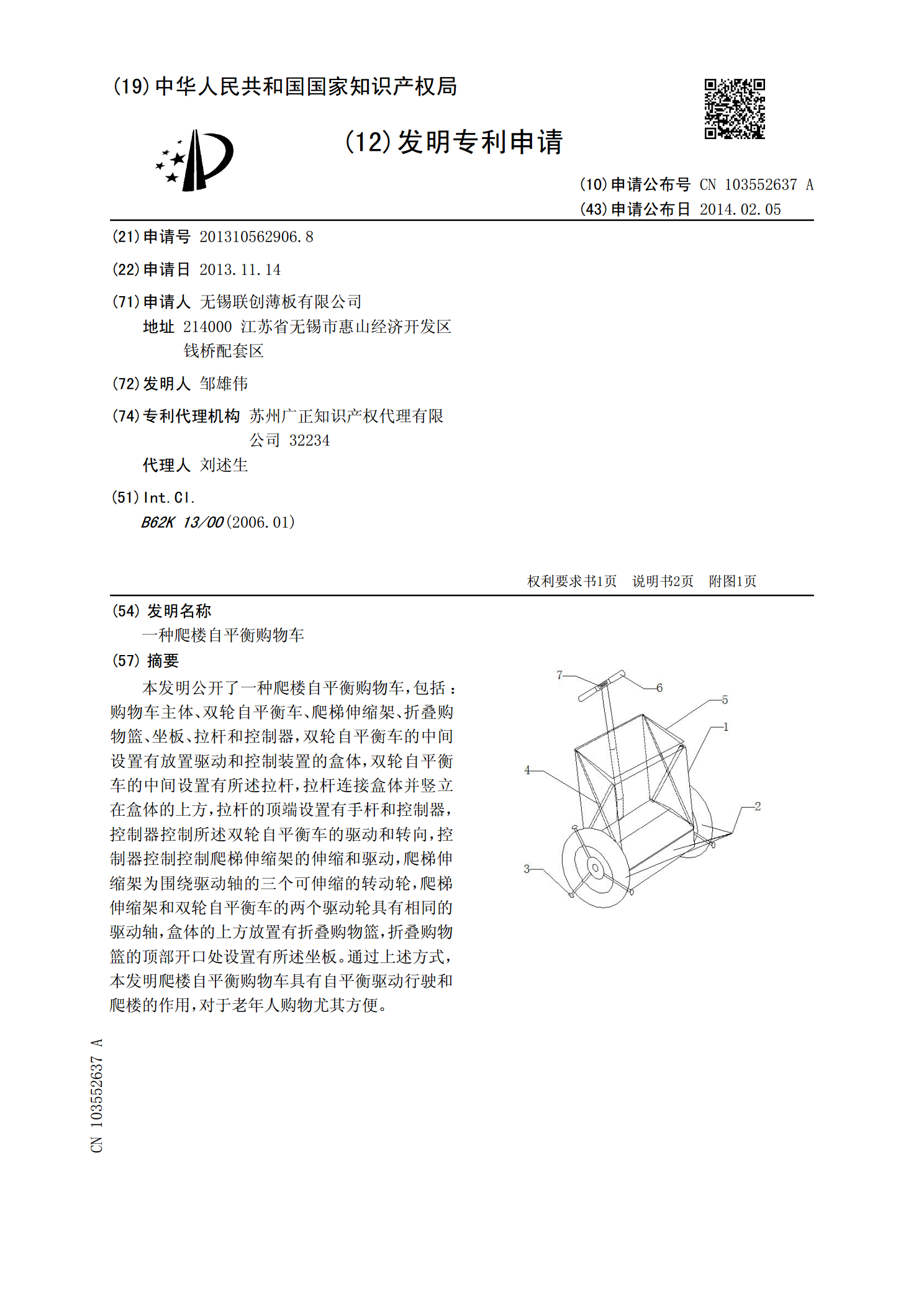
本发明公开了一种爬楼自平衡购物车,包括:购物车主体、双轮自平衡车、爬梯伸缩架、折叠购物篮、坐板、拉杆和控制器,双轮自平衡车的中间设置有放置驱动和控制装置的盒体,双轮自平衡车的中间设置有所述拉杆,拉杆连接盒体并竖立在盒体的上方,拉杆的顶端设置有手杆和控制器,控制器控制所述双轮自平衡车的驱动和转向,控制器控制控制爬梯伸缩架的伸缩和驱动,爬梯伸缩架为围绕驱动轴的三个可伸缩的转动轮,爬梯伸缩架和双轮自平衡车的两个驱动轮具有相同的驱动轴,盒体的上方放置有折叠购物篮,折叠购物篮的顶部开口处设置有所述坐板。通过上述方式
一种自平衡式爬楼运输机.pdf
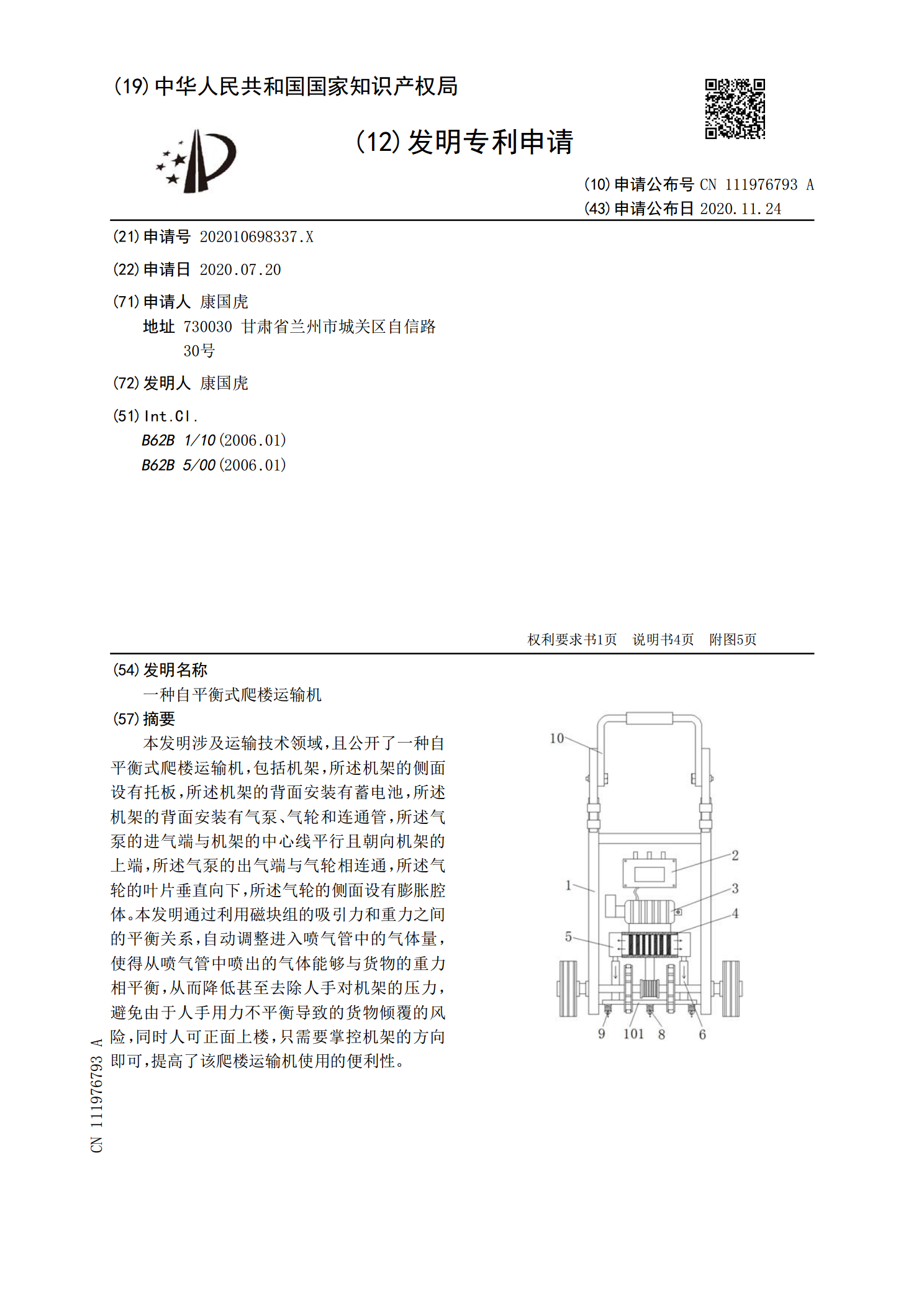
本发明涉及运输技术领域,且公开了一种自平衡式爬楼运输机,包括机架,所述机架的侧面设有托板,所述机架的背面安装有蓄电池,所述机架的背面安装有气泵、气轮和连通管,所述气泵的进气端与机架的中心线平行且朝向机架的上端,所述气泵的出气端与气轮相连通,所述气轮的叶片垂直向下,所述气轮的侧面设有膨胀腔体。本发明通过利用磁块组的吸引力和重力之间的平衡关系,自动调整进入喷气管中的气体量,使得从喷气管中喷出的气体能够与货物的重力相平衡,从而降低甚至去除人手对机架的压力,避免由于人手用力不平衡导致的货物倾覆的风险,同时人可正面
一种自平衡爬楼轮椅.pdf
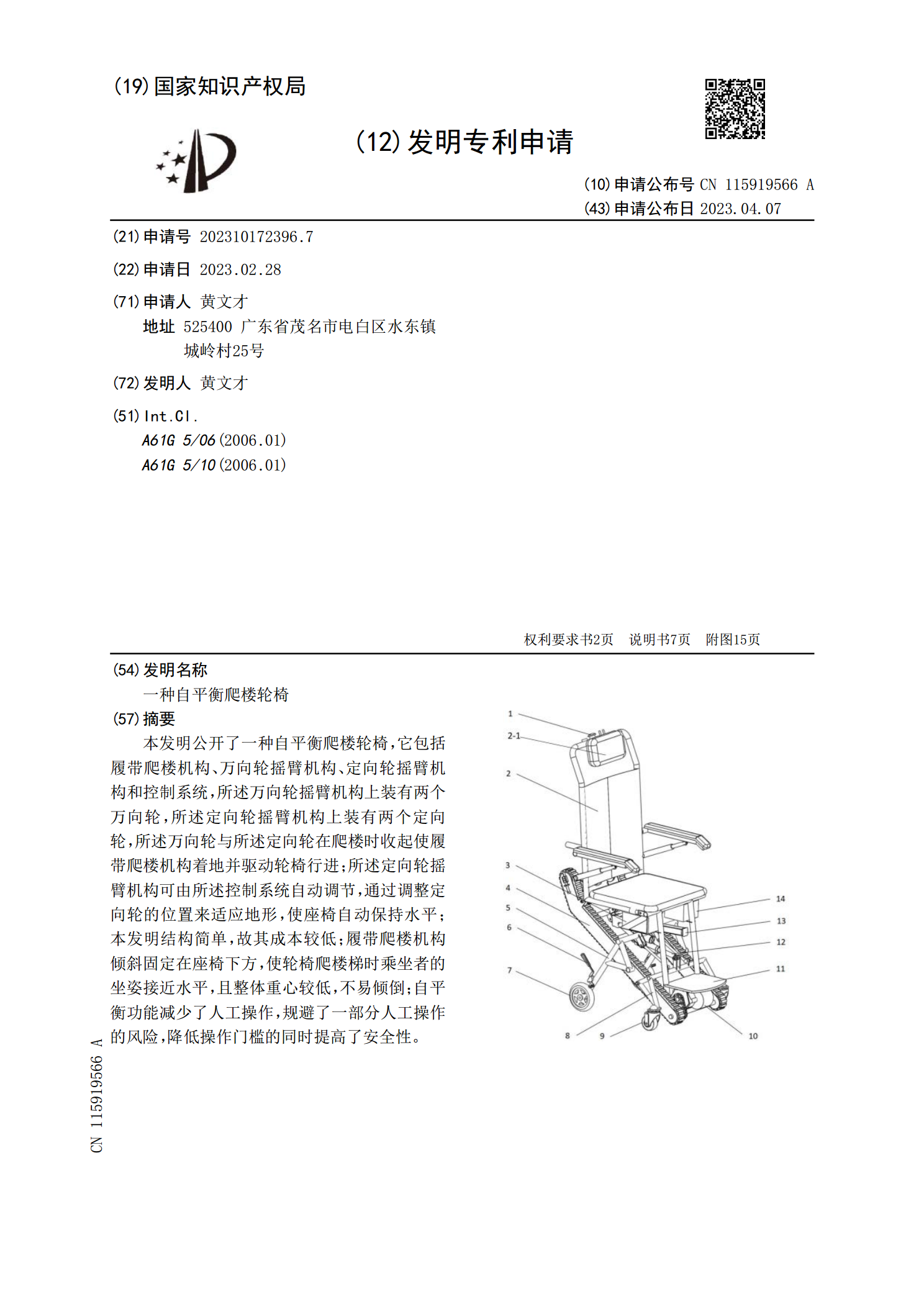
本发明公开了一种自平衡爬楼轮椅,它包括履带爬楼机构、万向轮摇臂机构、定向轮摇臂机构和控制系统,所述万向轮摇臂机构上装有两个万向轮,所述定向轮摇臂机构上装有两个定向轮,所述万向轮与所述定向轮在爬楼时收起使履带爬楼机构着地并驱动轮椅行进;所述定向轮摇臂机构可由所述控制系统自动调节,通过调整定向轮的位置来适应地形,使座椅自动保持水平;本发明结构简单,故其成本较低;履带爬楼机构倾斜固定在座椅下方,使轮椅爬楼梯时乘坐者的坐姿接近水平,且整体重心较低,不易倾倒;自平衡功能减少了人工操作,规避了一部分人工操作的风险,降
一种爬楼助力平衡车.pdf
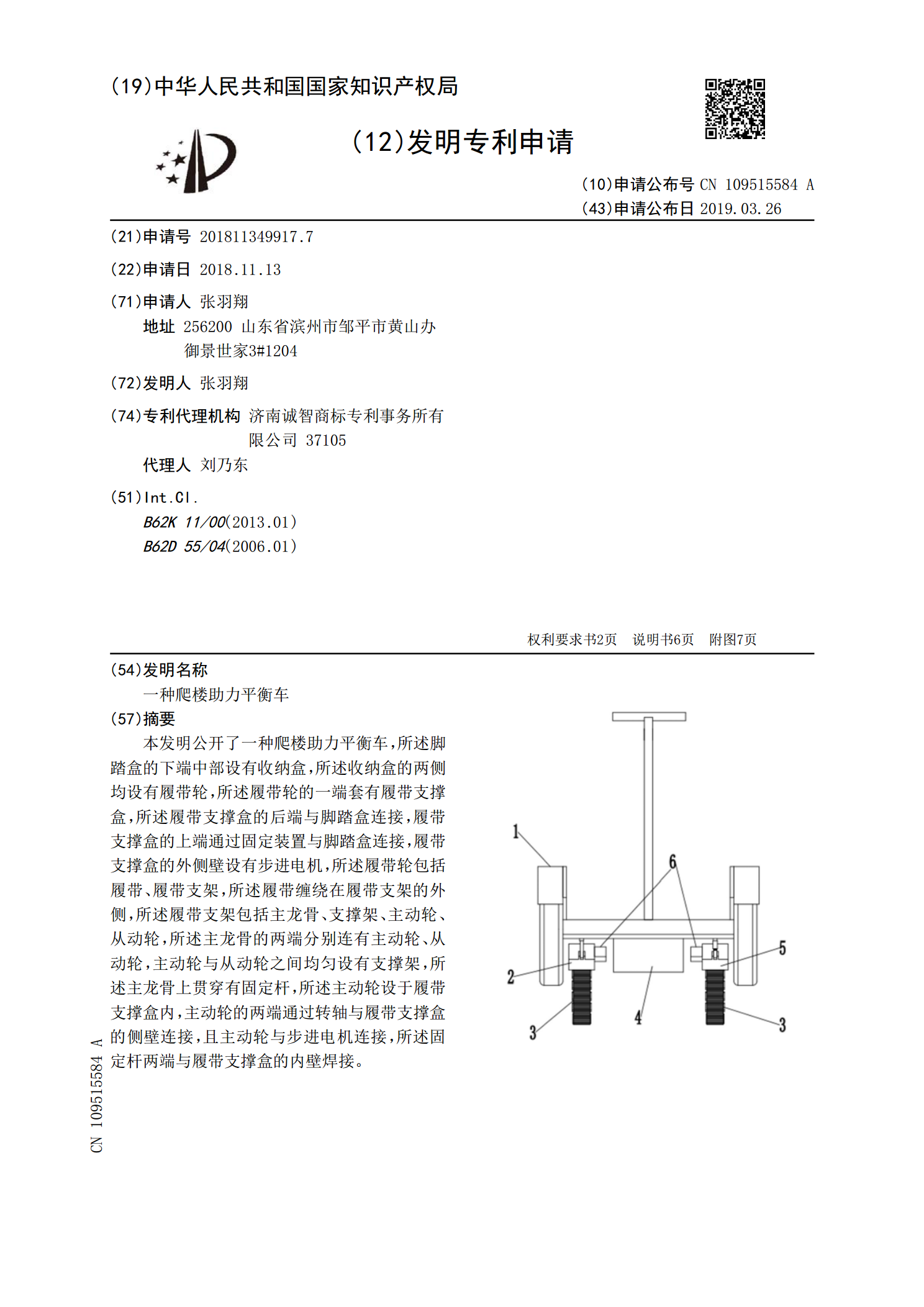
本发明公开了一种爬楼助力平衡车,所述脚踏盒的下端中部设有收纳盒,所述收纳盒的两侧均设有履带轮,所述履带轮的一端套有履带支撑盒,所述履带支撑盒的后端与脚踏盒连接,履带支撑盒的上端通过固定装置与脚踏盒连接,履带支撑盒的外侧壁设有步进电机,所述履带轮包括履带、履带支架,所述履带缠绕在履带支架的外侧,所述履带支架包括主龙骨、支撑架、主动轮、从动轮,所述主龙骨的两端分别连有主动轮、从动轮,主动轮与从动轮之间均匀设有支撑架,所述主龙骨上贯穿有固定杆,所述主动轮设于履带支撑盒内,主动轮的两端通过转轴与履带支撑盒的侧壁连