
(完整PPT)ABB工业机器人编程基础操作.ppt

论文****可爱


1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共78页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

(完整PPT)ABB工业机器人编程基础操作.ppt
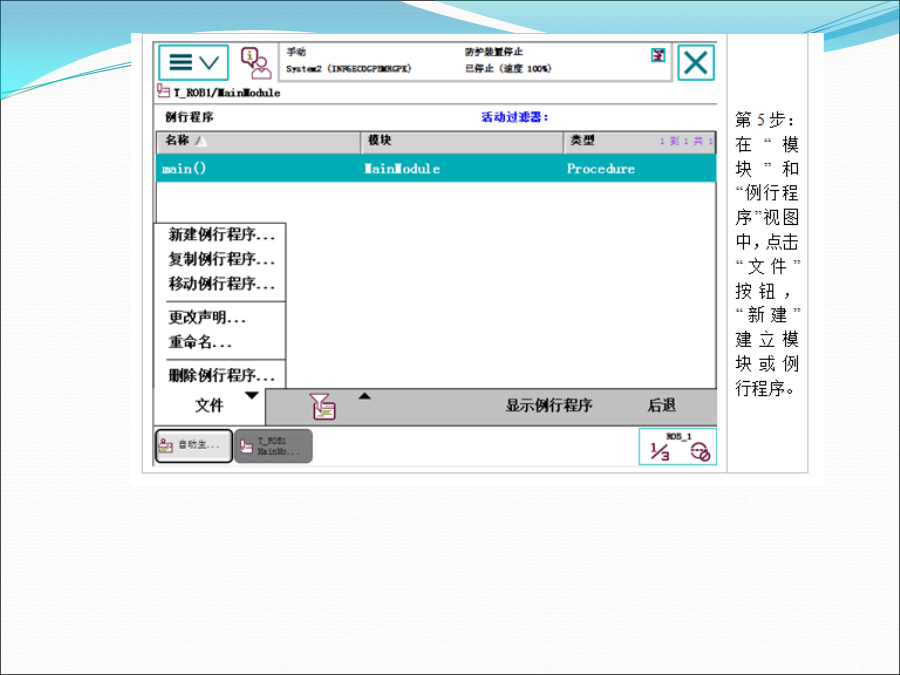
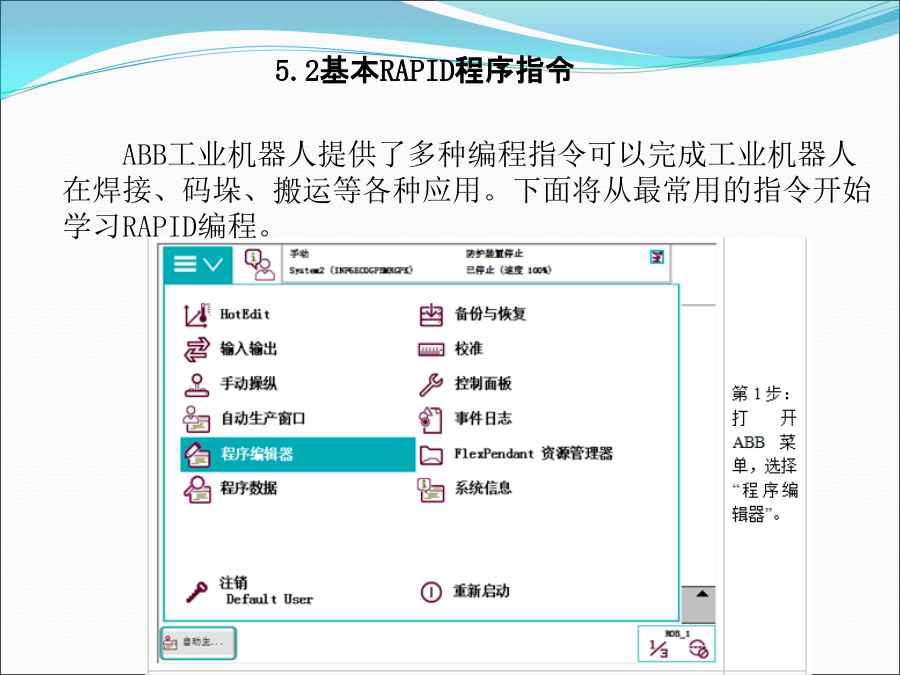
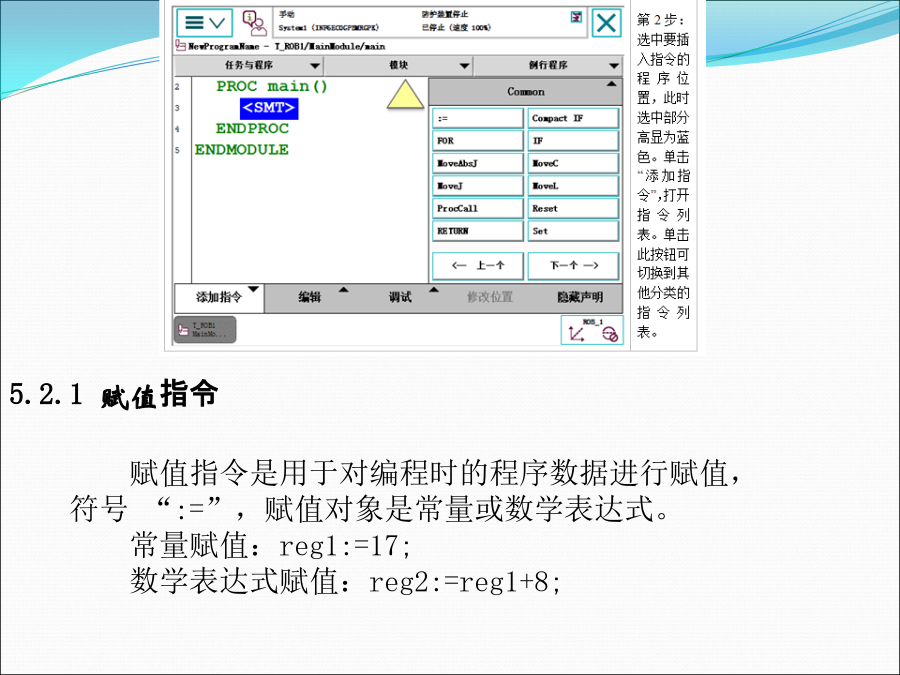
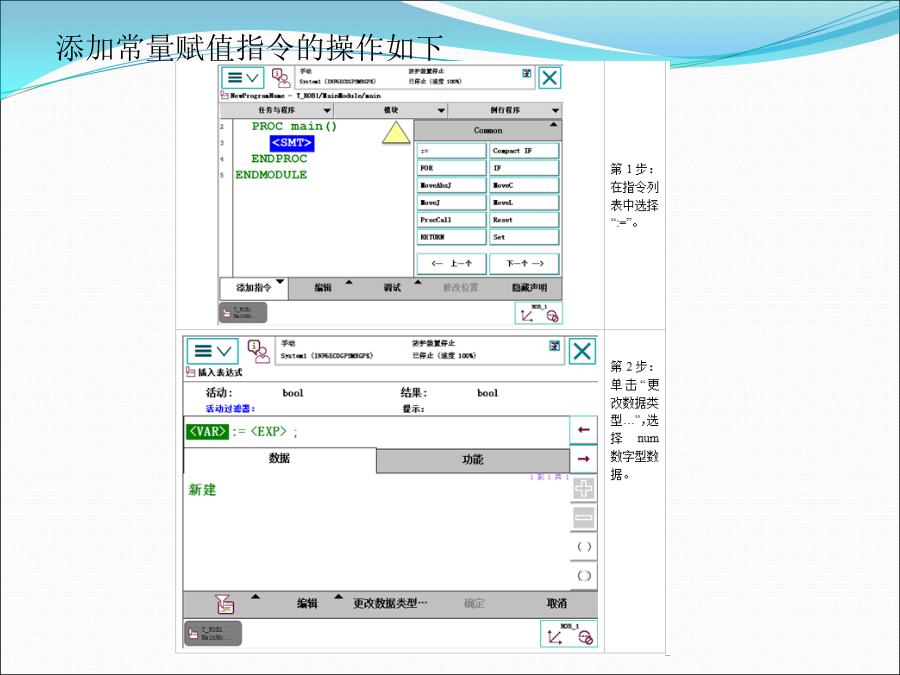
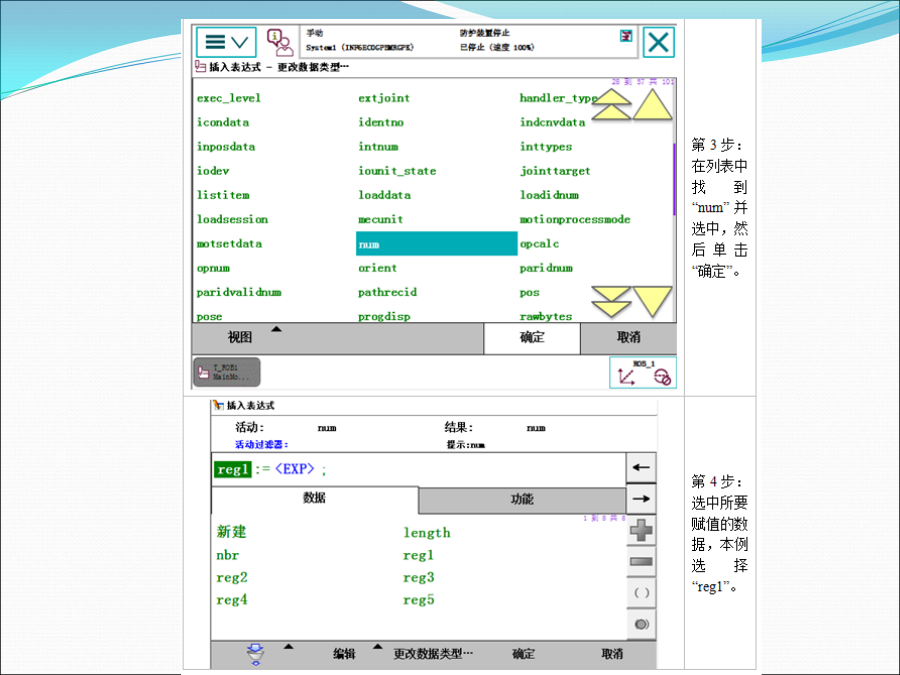
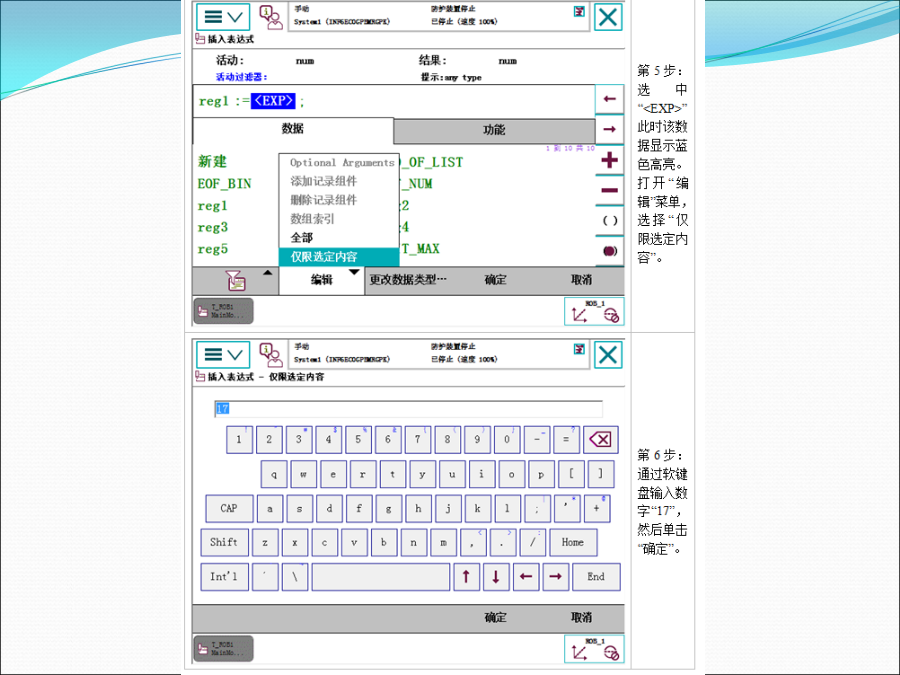
5.1.2建立RAPID程序5.2基本RAPID程序指令5.2.1赋值指令添加常量赋值指令的操作如下(2)添加带数学表达式的赋值指令的操作5.2.2工业机器人常用运动指令MoveAbsJjpos10\NoEOffs,v1000,z50,tool1\Wobj:=wobj1;关节运动3.线性运动指令线性运动是机器人的TCP从起点到终点之间的路径始终保持为直线。一般如焊接、涂胶等应用对路径要求高的场合使用此指令。4.圆弧运动指令圆弧路径是在机器人可到达的控件范围内定义三个位置点,第一个点是圆弧的起点,第二个点用

ABB工业机器人编程基础操作.ppt
5.1.2建立RAPID程序5.2基本RAPID程序指令5.2.1赋值指令添加常量赋值指令的操作如下(2)添加带数学表达式的赋值指令的操作5.2.2工业机器人常用运动指令MoveAbsJjpos10\NoEOffs,v1000,z50,tool1\Wobj:=wobj1;关节运动3.线性运动指令线性运动是机器人的TCP从起点到终点之间的路径始终保持为直线。一般如焊接、涂胶等应用对路径要求高的场合使用此指令。4.圆弧运动指令圆弧路径是在机器人可到达的控件范围内定义三个位置点,第一个点是圆弧的起点,第二个点用

ABB工业机器人编程基础操作.ppt
5.1.2建立RAPID程序235.2基本RAPID程序指令5.2.1赋值指令添加常量赋值指令的操作如下789(2)添加带数学表达式的赋值指令的操作111213145.2.2工业机器人常用运动指令16171819MoveAbsJjpos10\NoEOffs,v1000,z50,tool1\Wobj:=wobj1;关节运动3.线性运动指令线性运动是机器人的TCP从起点到终点之间的路径始终保持为直线。一般如焊接、涂胶等应用对路径要求高的场合使用此指令。4.圆弧运动指令圆弧路径是在机器人可到达的控件范围内定义三
工业机器人操作与编程试题——基础模块.pdf
工业机器人操作与编程试题——基础模块1.机构当出现死点时,对运动传递是不利的,因此因设法避免;而在夹具设计时,却需要利用机构的死点性质。对(正确答案)错2.在给工业机器人配电时,系统可以不接地。对错(正确答案)3.长时间不用的设备要放在干燥的地方,并定期清理设备上的灰尘,再次使用时要查一遍线路,确保无误后再通电使用。对(正确答案)错4.机器人抓取的物体重量只要不超过额定负载即可,无需考虑物体重心所处位置。(错)(正确答案)5.长时间不用的设备要放在干燥的地方,并定期清理设备上的灰尘,再次使用时要查一遍线路

工业机器人基础操作与编程阅读感想.docx
工业机器人基础操作与编程阅读感想一、内容简述在当今这个科技飞速发展的时代,工业机器人在各行各业中的应用日益广泛,成为了推动现代工业生产的重要力量。作为一名对工业机器人充满兴趣的读者,我最近有幸阅读了《工业机器人基础操作与编程》它为我提供了一个全面而深入的了解工业机器人的平台。通过这本书的阅读,我不仅掌握了工业机器人的基本操作技能,还对工业机器人的编程技术有了更进一步的认识。书中首先详细介绍了工业机器人的基本构造和工作原理,包括机械结构、控制系统、传感器等方面,让读者对工业机器人有一个直观而全面的了解。书中