
ABB工业机器人编程基础操作.ppt

天马****23

1/10
2/10

3/10
4/10
5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共78页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

ABB工业机器人编程基础操作.ppt
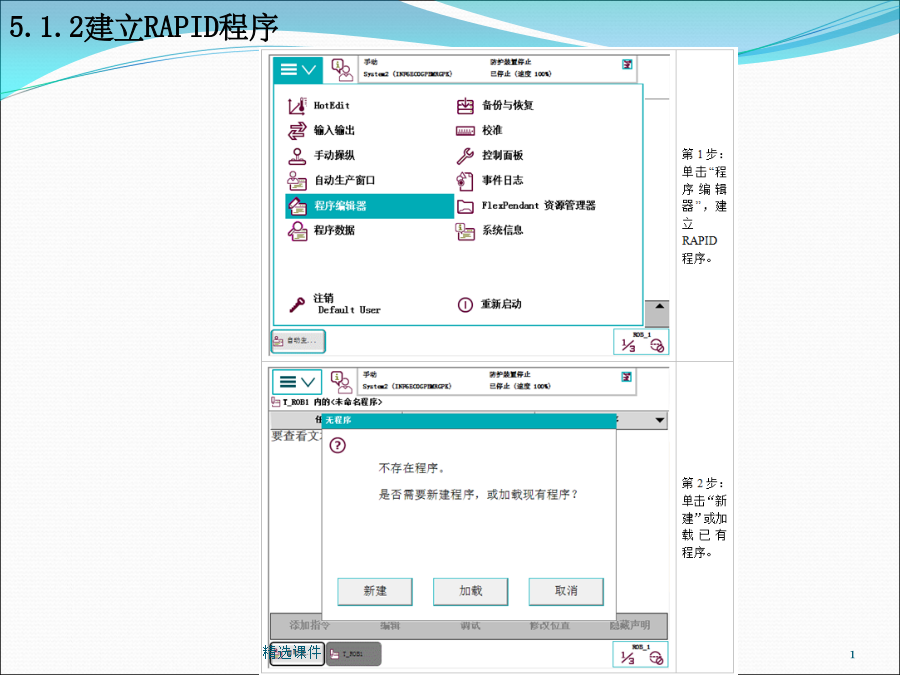
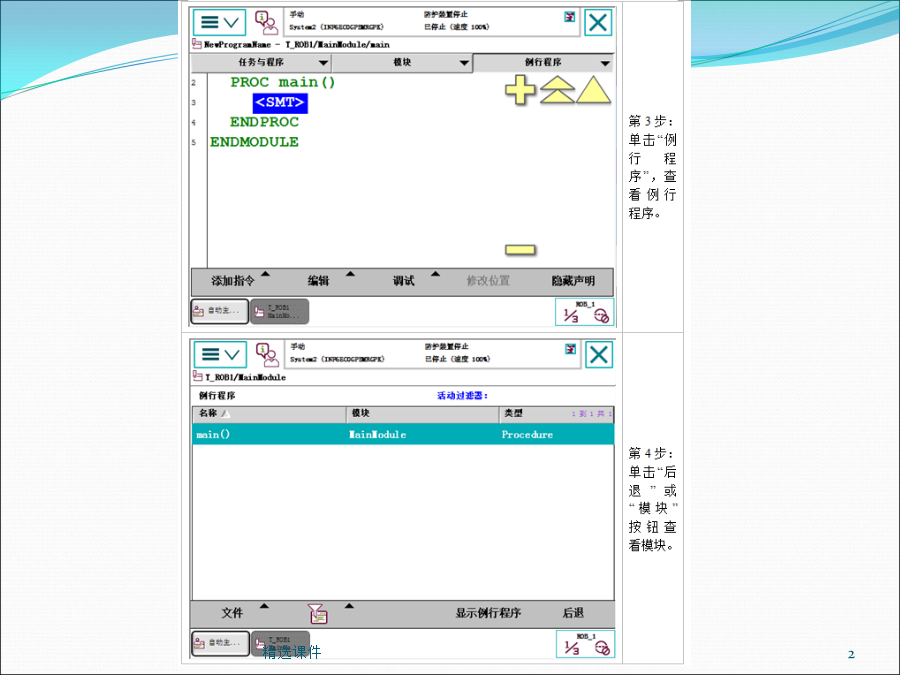
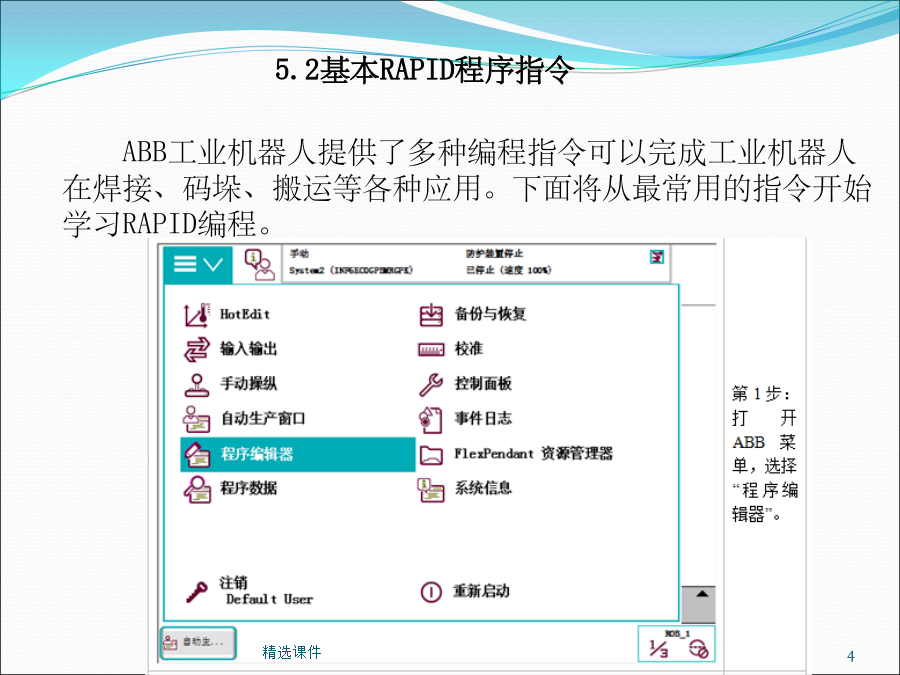
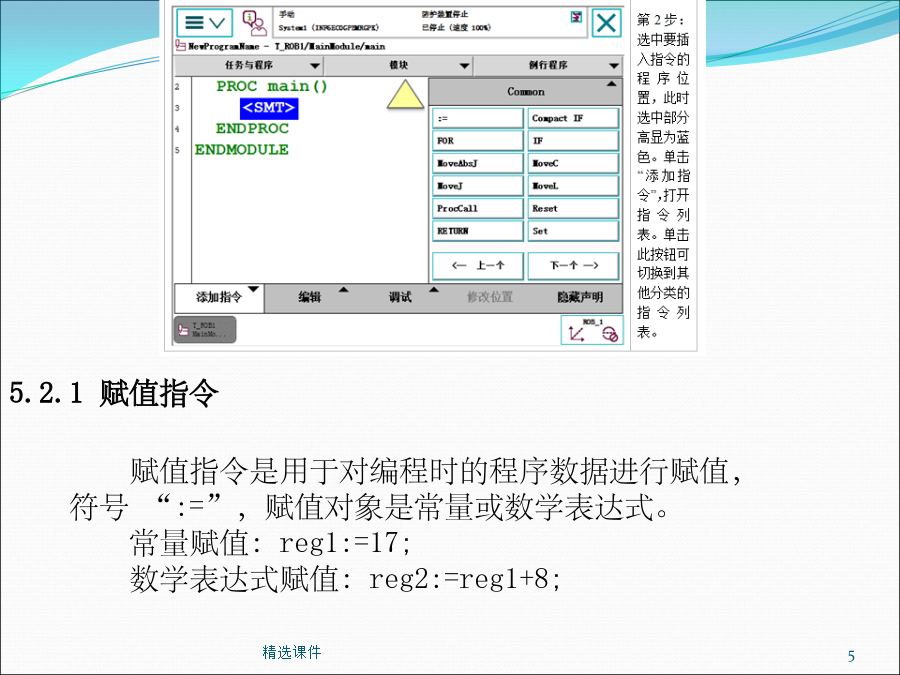
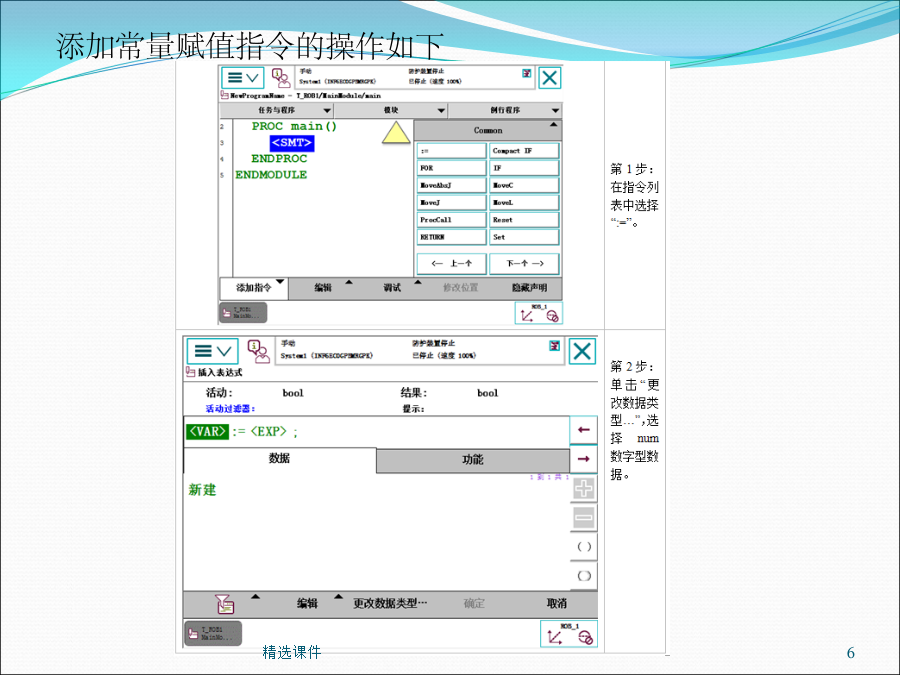
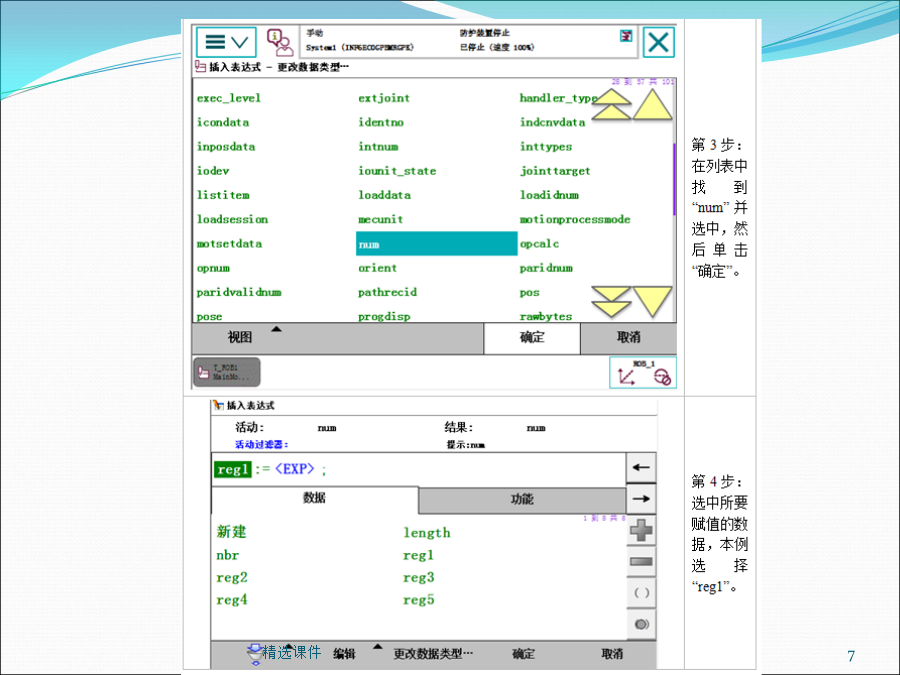
5.1.2建立RAPID程序235.2基本RAPID程序指令5.2.1赋值指令添加常量赋值指令的操作如下789(2)添加带数学表达式的赋值指令的操作111213145.2.2工业机器人常用运动指令16171819MoveAbsJjpos10\NoEOffs,v1000,z50,tool1\Wobj:=wobj1;关节运动3.线性运动指令线性运动是机器人的TCP从起点到终点之间的路径始终保持为直线。一般如焊接、涂胶等应用对路径要求高的场合使用此指令。4.圆弧运动指令圆弧路径是在机器人可到达的控件范围内定义三

ABB工业机器人编程基础操作.ppt
5.1.2建立RAPID程序5.2基本RAPID程序指令5.2.1赋值指令添加常量赋值指令的操作如下(2)添加带数学表达式的赋值指令的操作5.2.2工业机器人常用运动指令MoveAbsJjpos10\NoEOffs,v1000,z50,tool1\Wobj:=wobj1;关节运动3.线性运动指令线性运动是机器人的TCP从起点到终点之间的路径始终保持为直线。一般如焊接、涂胶等应用对路径要求高的场合使用此指令。4.圆弧运动指令圆弧路径是在机器人可到达的控件范围内定义三个位置点,第一个点是圆弧的起点,第二个点用

(完整PPT)ABB工业机器人编程基础操作.ppt
5.1.2建立RAPID程序5.2基本RAPID程序指令5.2.1赋值指令添加常量赋值指令的操作如下(2)添加带数学表达式的赋值指令的操作5.2.2工业机器人常用运动指令MoveAbsJjpos10\NoEOffs,v1000,z50,tool1\Wobj:=wobj1;关节运动3.线性运动指令线性运动是机器人的TCP从起点到终点之间的路径始终保持为直线。一般如焊接、涂胶等应用对路径要求高的场合使用此指令。4.圆弧运动指令圆弧路径是在机器人可到达的控件范围内定义三个位置点,第一个点是圆弧的起点,第二个点用
ABB工业机器人基础操作.ppt
ABB工业机器人基础操作机器人的开启与关闭机器人数据的备份与恢复(3)单击【ABC…】按钮,进行存放备份数据目录名称的设定;单击【…】,选择备份存放的位置(机器人硬盘或者USB存储设备);单击【备份】进行备份的操作。4)等待备份的完成;2、数据恢复(1)单击【ABB】按钮,选择【备份与恢复】,单击【恢复系统…】按钮;(2)单击【…】,选择备份存放的目录,单击【恢复】,完成系统恢复操作。机器人的手动操作1、单轴运动1、单轴运动操作步骤(4)单击【动作模式】;5)选中【轴1-3】,然后单击【确定】,就可以对轴
ABB工业机器人基础操作.ppt
ABB工业机器人基础操作机器人的开启与关闭机器人数据的备份与恢复(3)单击【ABC…】按钮,进行存放备份数据目录名称的设定;单击【…】,选择备份存放的位置(机器人硬盘或者USB存储设备);单击【备份】进行备份的操作。4)等待备份的完成;2、数据恢复(1)单击【ABB】按钮,选择【备份与恢复】,单击【恢复系统…】按钮;(2)单击【…】,选择备份存放的目录,单击【恢复】,完成系统恢复操作。机器人的手动操作1、单轴运动1、单轴运动操作步骤(4)单击【动作模式】;5)选中【轴1-3】,然后单击【确定】,就可以对轴