
一种巡检机器人伸缩手臂.pdf

努力****爱敏


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种巡检机器人伸缩手臂.pdf
本发明提供一种巡检机器人伸缩手臂,包括驱动模块、伸缩臂以及滑臂;所述伸缩臂包括导轨、皮带以及皮带卡,所述导轨的前后两端分别安装有前轮和后轮,所述皮带环绕在所述前轮和后轮上,所述皮带卡夹持所述皮带;所述导轨与所述驱动模块连接;所述滑臂可移动地安装在所述导轨上,并与所述皮带连接。本发明利用驱动模块带动伸缩臂及滑臂移动,当伸缩臂移动时,克服皮带卡对皮带的夹持摩擦力,使得皮带发生转动,转动皮带进而带动滑臂移动,实现了机器人手臂的伸缩。

一种可伸缩的机器人手臂.pdf
本发明公开了一种可伸缩的机器人手臂,包括前臂与后臂,后臂后端固定设置,后臂前端两侧分别设置有支架,支架包括上支架与下支架,上支架与下支架相对应的一侧设有齿条,下支架与上支架相对应的一侧设有滑槽,滑槽中空设置;还包括电机、控制器,电机与控制器电性连接;前臂后端的底部设有转轴,转轴穿过前臂后端,转轴的其中一端通过联轴器与电机的输出端连接,转轴的另一端通过轴承设置在滑槽上,电机输出端与联轴器之间设有齿轮,齿轮与齿条相啮合且齿轮设置在其中一侧滑槽的中空位置处,电机与轴承的底部设有与滑槽相配合的滑块。本发明能现机器

输电线路自动巡检机器人伸缩手臂传动装置.pdf
本发明设计一种输电线路自动巡检机器人伸缩手臂传动装置。该装置由手臂伸缩机构、手臂旋转机构和支架机构组成。手臂伸缩机构由内、外丝杠螺母传动机构、内外升降筒、升降电机和升降齿轮等组成,手臂旋转机构由转臂电机、蜗轮蜗杆机构和转臂箱组成。支架机构主要由转臂支架、转臂箱和转臂箱箱盖组成。该装置采用类似伸缩天线的内外升降筒组成的伸缩机构,使手臂的有效伸长长度升至单臂有效伸长长度的两倍,而手臂整体的长度尺寸却没有变化,从而在达到相同的伸长范围下,采用伸缩手臂的机器人可使整个机构的尺寸大大紧缩。
一种机器人手臂.pdf
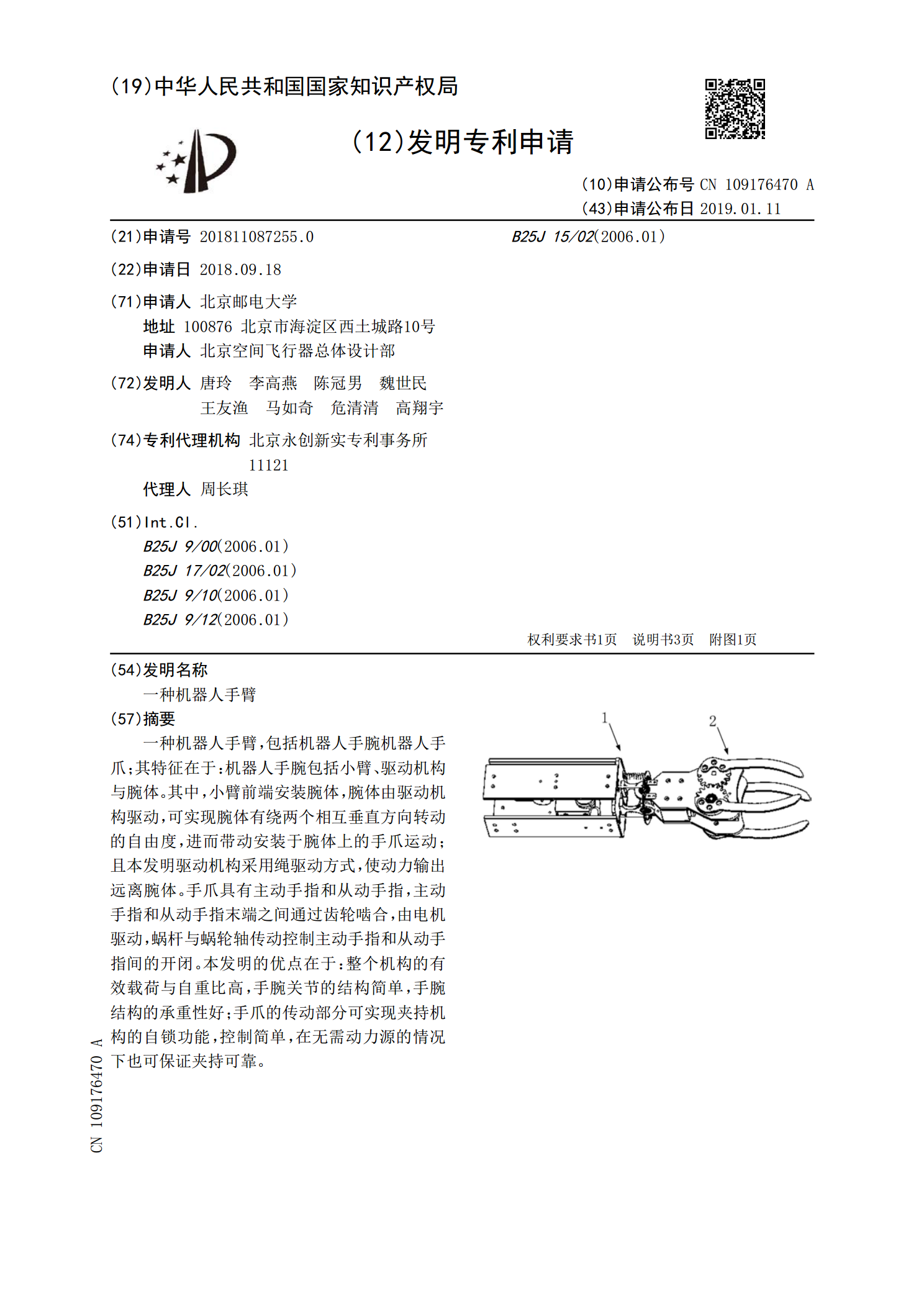
一种机器人手臂,包括机器人手腕机器人手爪;其特征在于:机器人手腕包括小臂、驱动机构与腕体。其中,小臂前端安装腕体,腕体由驱动机构驱动,可实现腕体有绕两个相互垂直方向转动的自由度,进而带动安装于腕体上的手爪运动;且本发明驱动机构采用绳驱动方式,使动力输出远离腕体。手爪具有主动手指和从动手指,主动手指和从动手指末端之间通过齿轮啮合,由电机驱动,蜗杆与蜗轮轴传动控制主动手指和从动手指间的开闭。本发明的优点在于:整个机构的有效载荷与自重比高,手腕关节的结构简单,手腕结构的承重性好;手爪的传动部分可实现夹持机构的自
一种机器人手臂.pdf
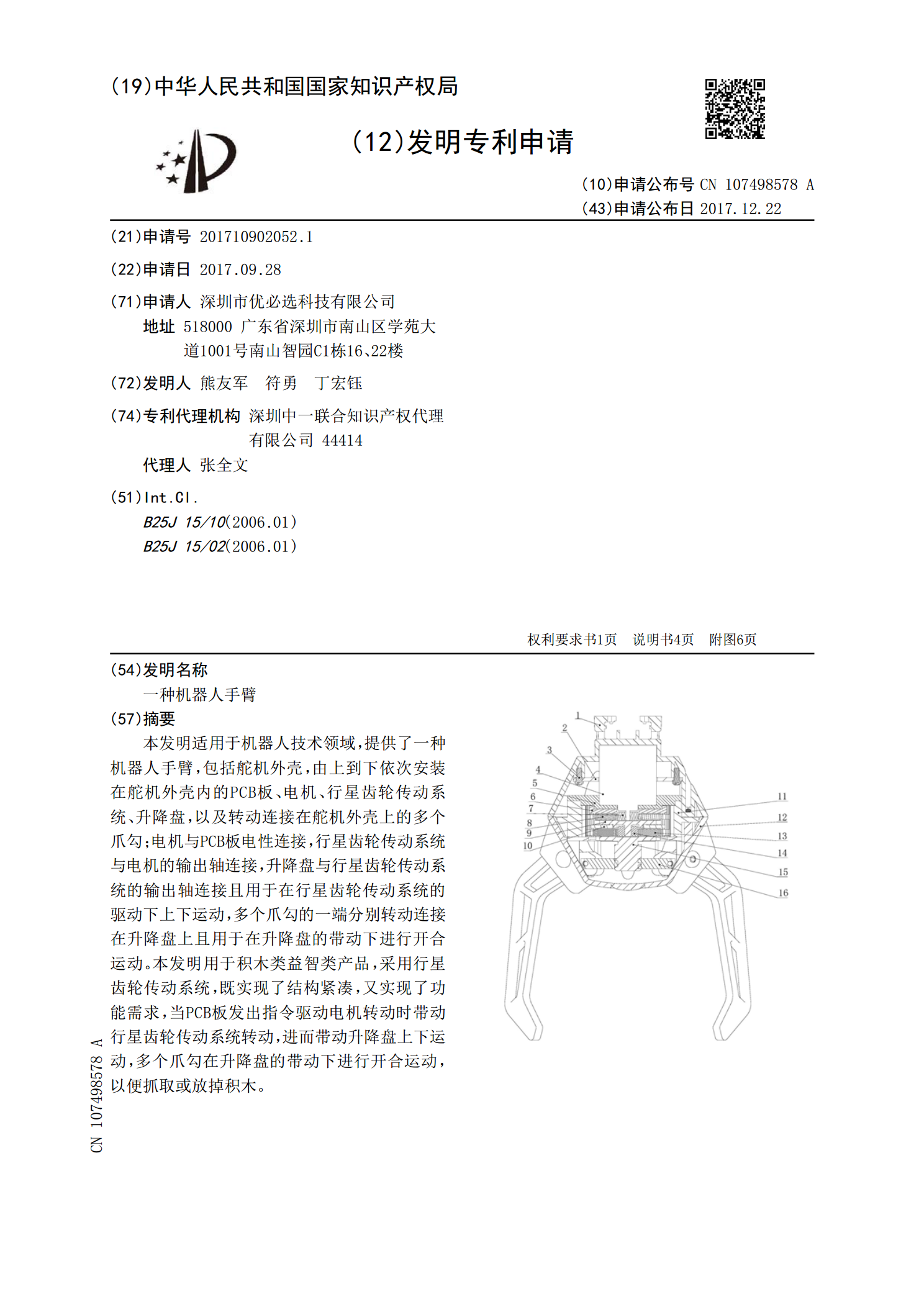
本发明适用于机器人技术领域,提供了一种机器人手臂,包括舵机外壳,由上到下依次安装在舵机外壳内的PCB板、电机、行星齿轮传动系统、升降盘,以及转动连接在舵机外壳上的多个爪勾;电机与PCB板电性连接,行星齿轮传动系统与电机的输出轴连接,升降盘与行星齿轮传动系统的输出轴连接且用于在行星齿轮传动系统的驱动下上下运动,多个爪勾的一端分别转动连接在升降盘上且用于在升降盘的带动下进行开合运动。本发明用于积木类益智类产品,采用行星齿轮传动系统,既实现了结构紧凑,又实现了功能需求,当PCB板发出指令驱动电机转动时带动行星齿