
一种柔索人工肌肉.pdf

鹏飞****可爱

1/7
2/7

3/7

4/7
5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种柔索人工肌肉.pdf
本发明提供的是一种柔索人工肌肉。包括框架、柔索驱动装置、拉力传感器和编码器,柔索驱动装置包括电机、第一柔性绳索、第一弹簧、第二弹簧、弹簧并联装置、第二柔性绳索,第一弹簧和第二弹簧的上端通过弹簧并联装置并联,第二弹簧的下端通过支撑板安装在框架上,电机固定在框架上,电机输出轴上安装柔索牵引轮,第一柔性绳索的一端固定在柔索牵引轮上,第一柔性绳索的另端与第一弹簧的下端连接,第二柔性绳索的一端与第一弹簧的上端连接,拉力传感器安装在框架上,第二柔性绳索穿过拉力传感器与接触,编码器安装在电机上。本发明是一种结构简单,重
一种完全或冗余约束柔索的柔索抓取机械人.pdf
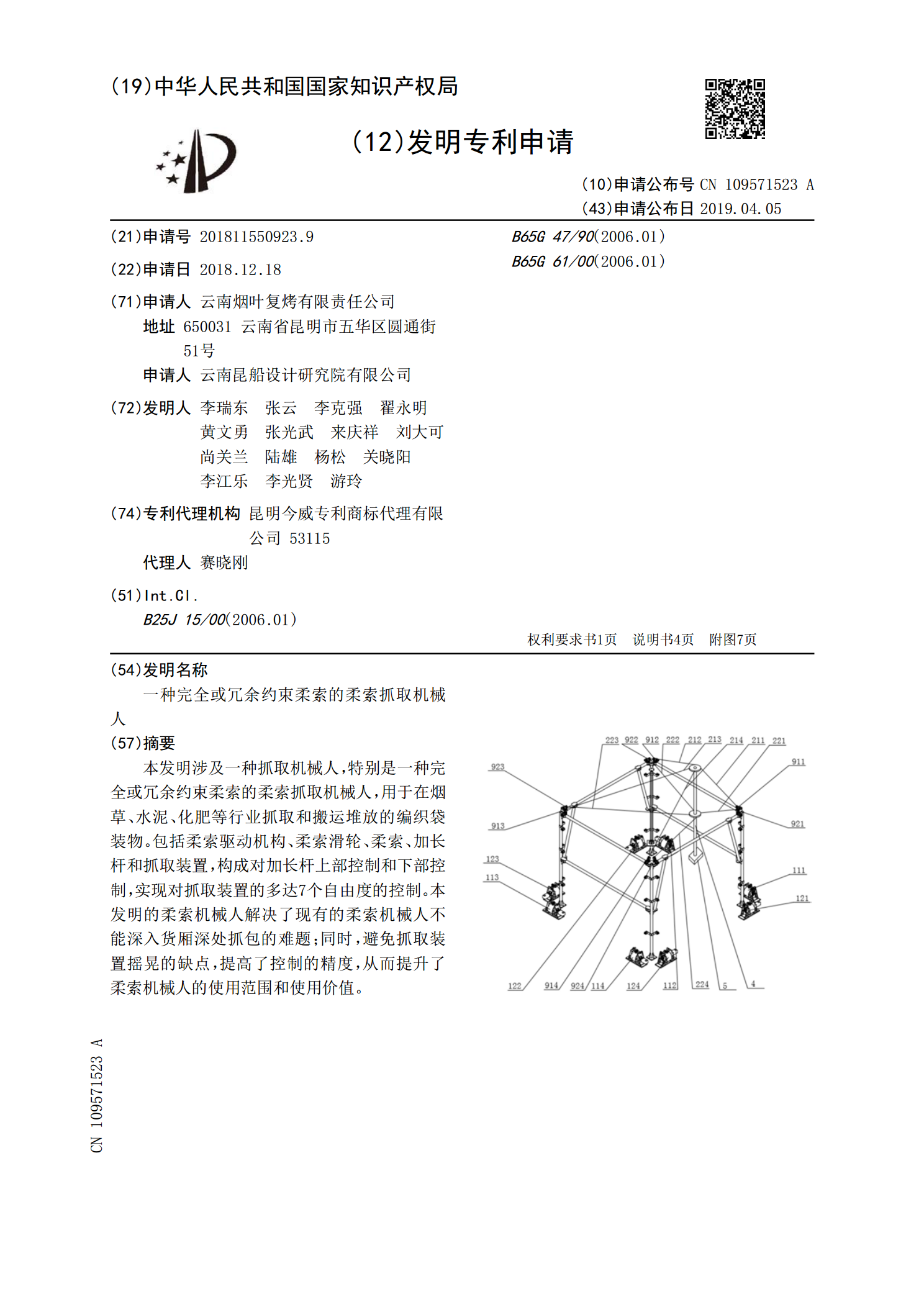
本发明涉及一种抓取机械人,特别是一种完全或冗余约束柔索的柔索抓取机械人,用于在烟草、水泥、化肥等行业抓取和搬运堆放的编织袋装物。包括柔索驱动机构、柔索滑轮、柔索、加长杆和抓取装置,构成对加长杆上部控制和下部控制,实现对抓取装置的多达7个自由度的控制。本发明的柔索机械人解决了现有的柔索机械人不能深入货厢深处抓包的难题;同时,避免抓取装置摇晃的缺点,提高了控制的精度,从而提升了柔索机械人的使用范围和使用价值。
一种柔索传动精密模组.pdf
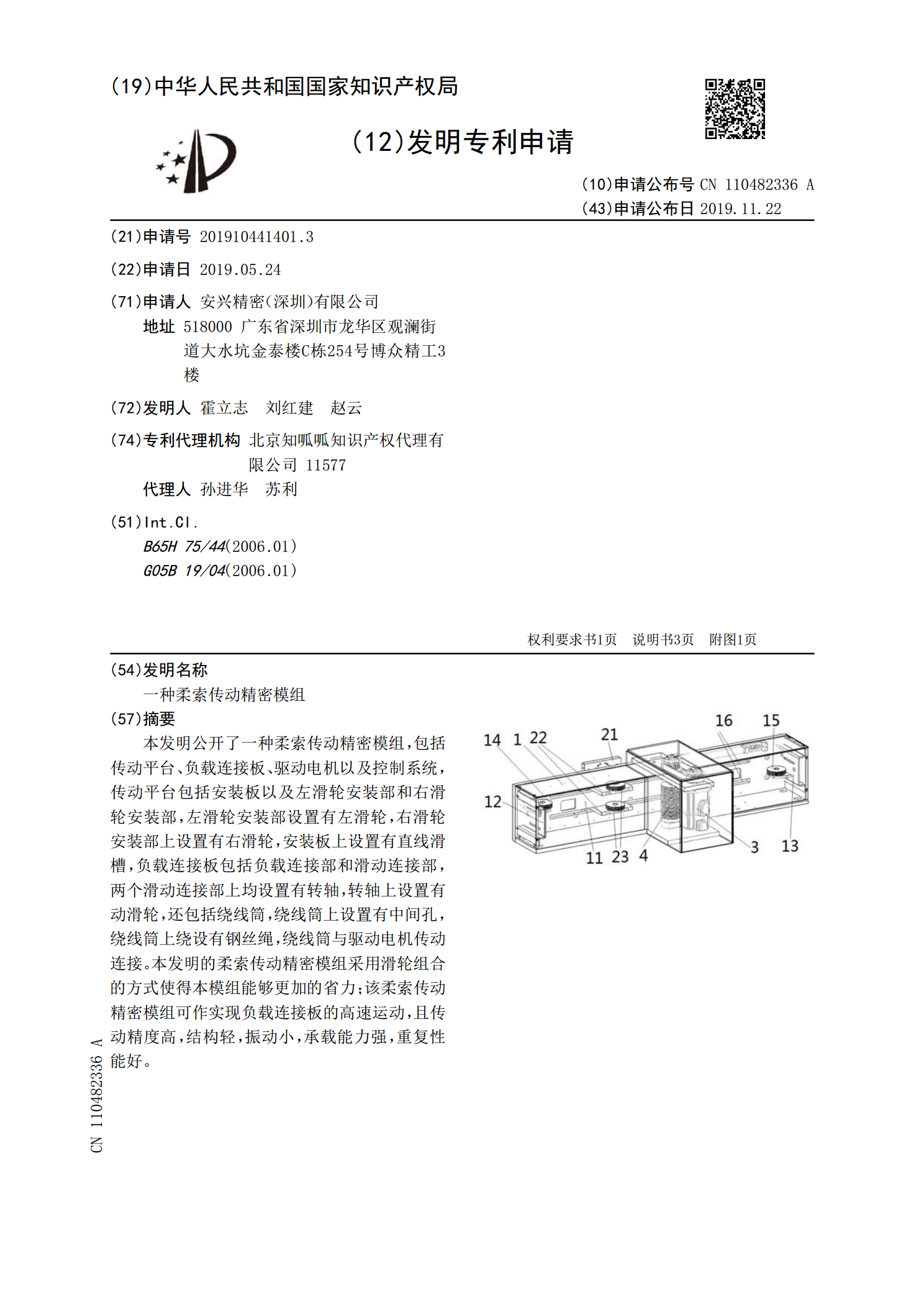
本发明公开了一种柔索传动精密模组,包括传动平台、负载连接板、驱动电机以及控制系统,传动平台包括安装板以及左滑轮安装部和右滑轮安装部,左滑轮安装部设置有左滑轮,右滑轮安装部上设置有右滑轮,安装板上设置有直线滑槽,负载连接板包括负载连接部和滑动连接部,两个滑动连接部上均设置有转轴,转轴上设置有动滑轮,还包括绕线筒,绕线筒上设置有中间孔,绕线筒上绕设有钢丝绳,绕线筒与驱动电机传动连接。本发明的柔索传动精密模组采用滑轮组合的方式使得本模组能够更加的省力;该柔索传动精密模组可作实现负载连接板的高速运动,且传动精度高

柔索驱动单元.pdf
本发明的目的在于提供柔索驱动单元,包括驱动单元支架、周转柔索导向装置、永磁直流力矩电机、固定柔索导向装置、柔索牵引轮、导向轴,永磁直流力矩电机安装在驱动单元支架外,柔索牵引轮安装在驱动单元支架里,永磁直流力矩电机的输出轴连接柔索牵引轮,周转柔索导向装置通过导向轴连接固定柔索导向装置,固定柔索导向装置固定在驱动单元支架里,周转柔索导向装置、导向轴安装在驱动单元支架外,柔索缠绕在柔索牵引轮上并穿过固定柔索导向装置、导向轴、周转柔索导向装置。柔索驱动单元能够完成空间多自由度的柔索驱动,驱动单元模块化,整体结构紧
一种柔索驱动的主动柔性针.pdf
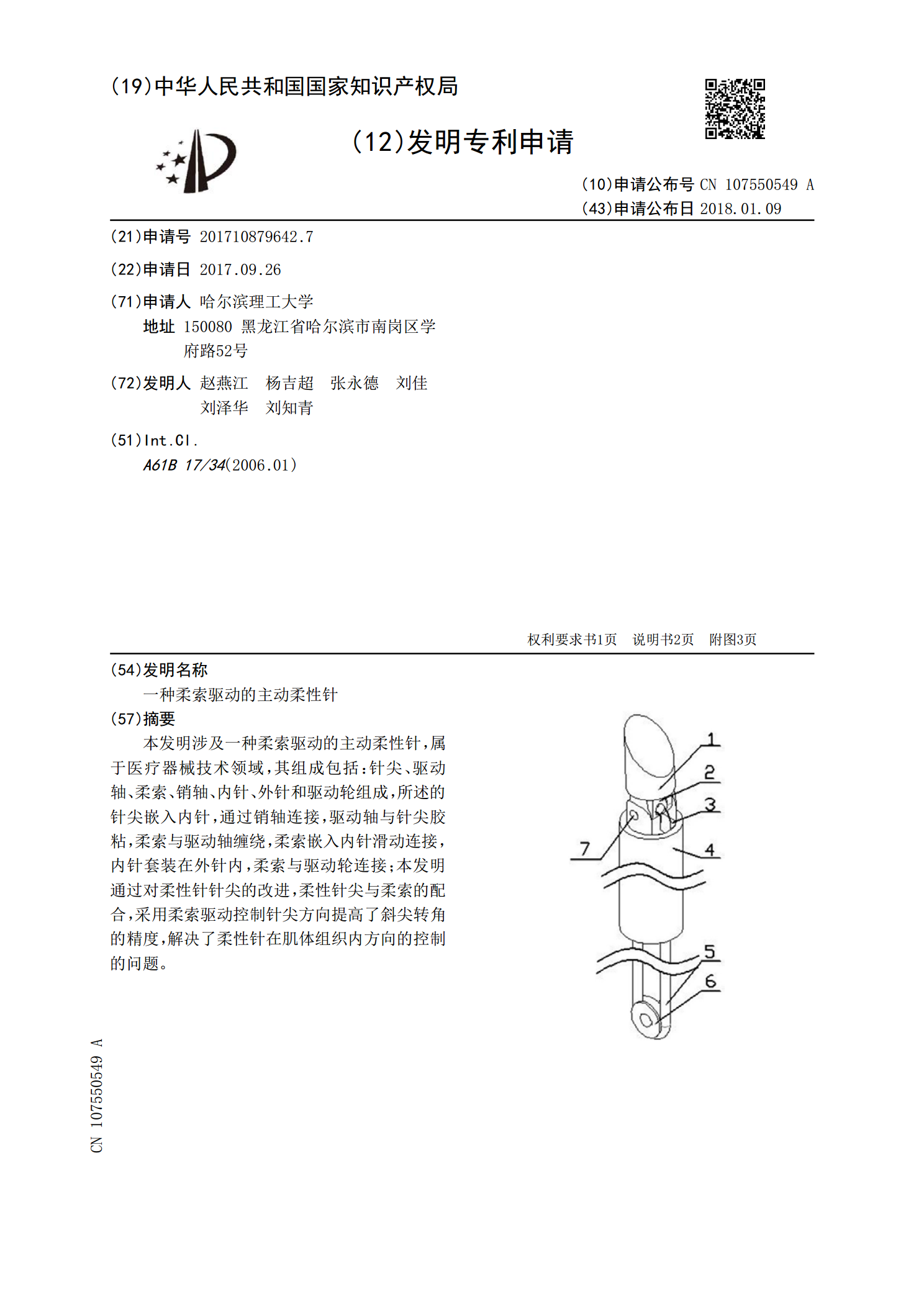
本发明涉及一种柔索驱动的主动柔性针,属于医疗器械技术领域,其组成包括:针尖、驱动轴、柔索、销轴、内针、外针和驱动轮组成,所述的针尖嵌入内针,通过销轴连接,驱动轴与针尖胶粘,柔索与驱动轴缠绕,柔索嵌入内针滑动连接,内针套装在外针内,柔索与驱动轮连接;本发明通过对柔性针针尖的改进,柔性针尖与柔索的配合,采用柔索驱动控制针尖方向提高了斜尖转角的精度,解决了柔性针在肌体组织内方向的控制的问题。