
伺服驱动器参数设置方法.pdf

一条****淑淑


1/2
2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
伺服驱动器参数设置方法.pdf
伺服驱动器参数设置方法--伺服驱动器参数设置方法在自动化设备中经常用到伺服电机特别是位置控制大部分品牌的伺服电机都有位置控制功能通过控制器发出脉冲来控制伺服电机运行脉冲数对应转的角度脉冲频率对应速度(与电子齿轮设定有关)当一个新的系统参数不能工作时首先设定位置增益确保电机无噪音情况下尽量设大些转动惯量比也非常重要可通过自学习设定的数来参考然后设定速度增益和速度积分时间确保在低速运行时连续位置精
伺服驱动器参数设置方法.pdf
伺服驱动器参数设置方法--伺服驱动器参数设置方法在自动化设备中,经常用到伺服电机,特别是位置控制,大部分品牌的伺服电机都有位置控制功能,通过控制器发出脉冲来控制伺服电机运行,脉冲数对应转的角度,脉冲频率对应速度(与电子齿轮设定有关),当一个新的系统,参数不能工作时,首先设定位置增益,确保电机无噪音情况下,尽量设大些,转动惯量比也非常重要,可通过自学习设定的数来参考,然后设定速度增益和速度积分时间,确保在低速运行时连续,位置精度受控即可。1.位置比例增益:设定位置环调节器的比例增益。设置值越大,增益越高,刚

(推荐)伺服驱动器参数设置方法.doc
伺服驱动器参数设置方法在自动化设备中,经常用到伺服电机,特别是位置控制,大部分品牌的伺服电机都有位置控制功能,通过控制器发出脉冲来控制伺服电机运行,脉冲数对应转的角度,脉冲频率对应速度(与电子齿轮设定有关),当一个新的系统,参数不能工作时,首先设定位置增益,确保电机无噪音情况下,尽量设大些,转动惯量比也非常重要,可通过自学习设定的数来参考,然后设定速度增益和速度积分时间,确保在低速运行时连续,位置精度受控即可。1.位置比例增益:设定位置环调节器的比例增益。设置值越大,增益越高,刚度越大,相同频率指令脉冲条
伺服驱动器的S曲线生成方法、装置和伺服驱动器.pdf
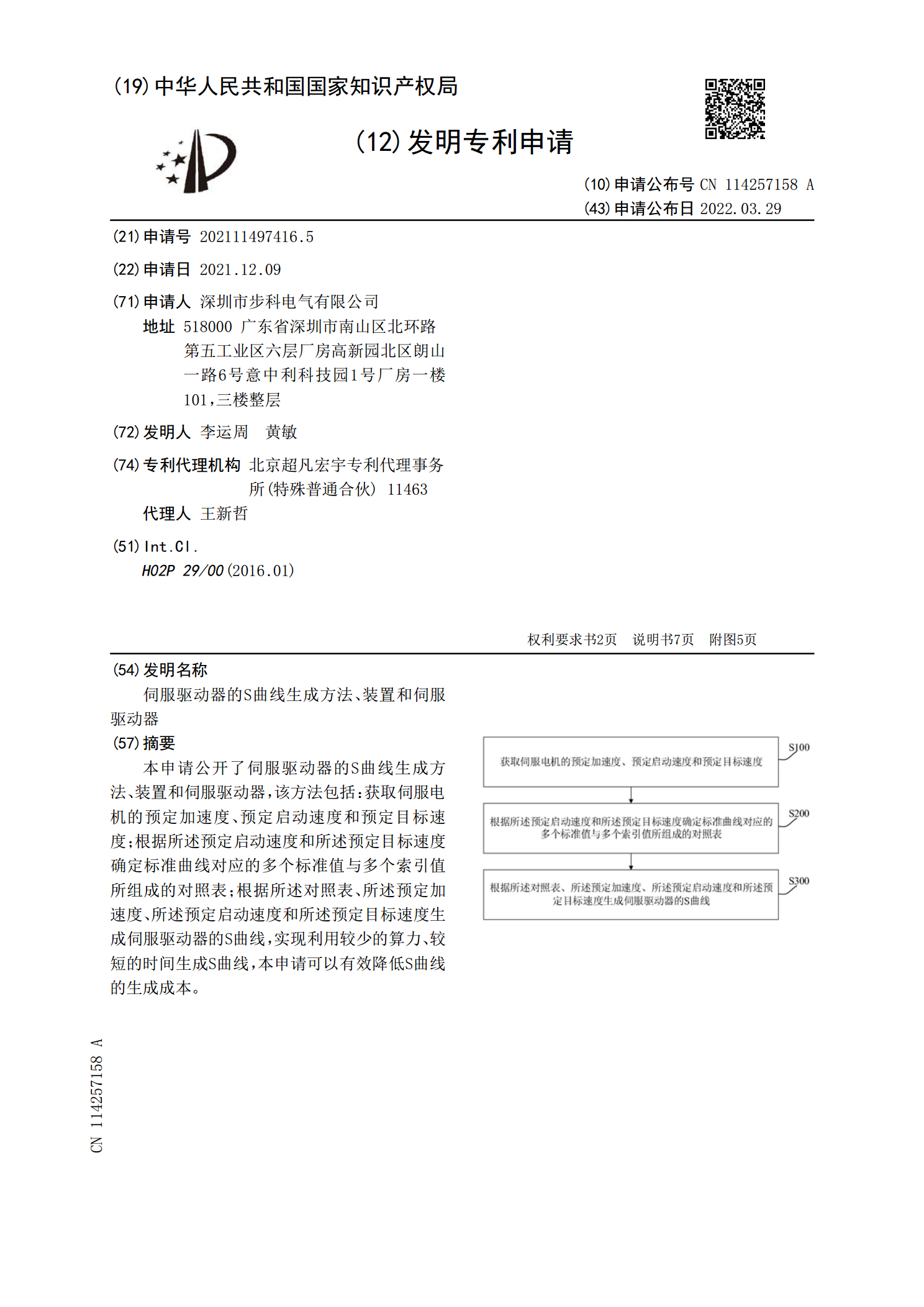
本申请公开了伺服驱动器的S曲线生成方法、装置和伺服驱动器,该方法包括:获取伺服电机的预定加速度、预定启动速度和预定目标速度;根据所述预定启动速度和所述预定目标速度确定标准曲线对应的多个标准值与多个索引值所组成的对照表;根据所述对照表、所述预定加速度、所述预定启动速度和所述预定目标速度生成伺服驱动器的S曲线,实现利用较少的算力、较短的时间生成S曲线,本申请可以有效降低S曲线的生成成本。
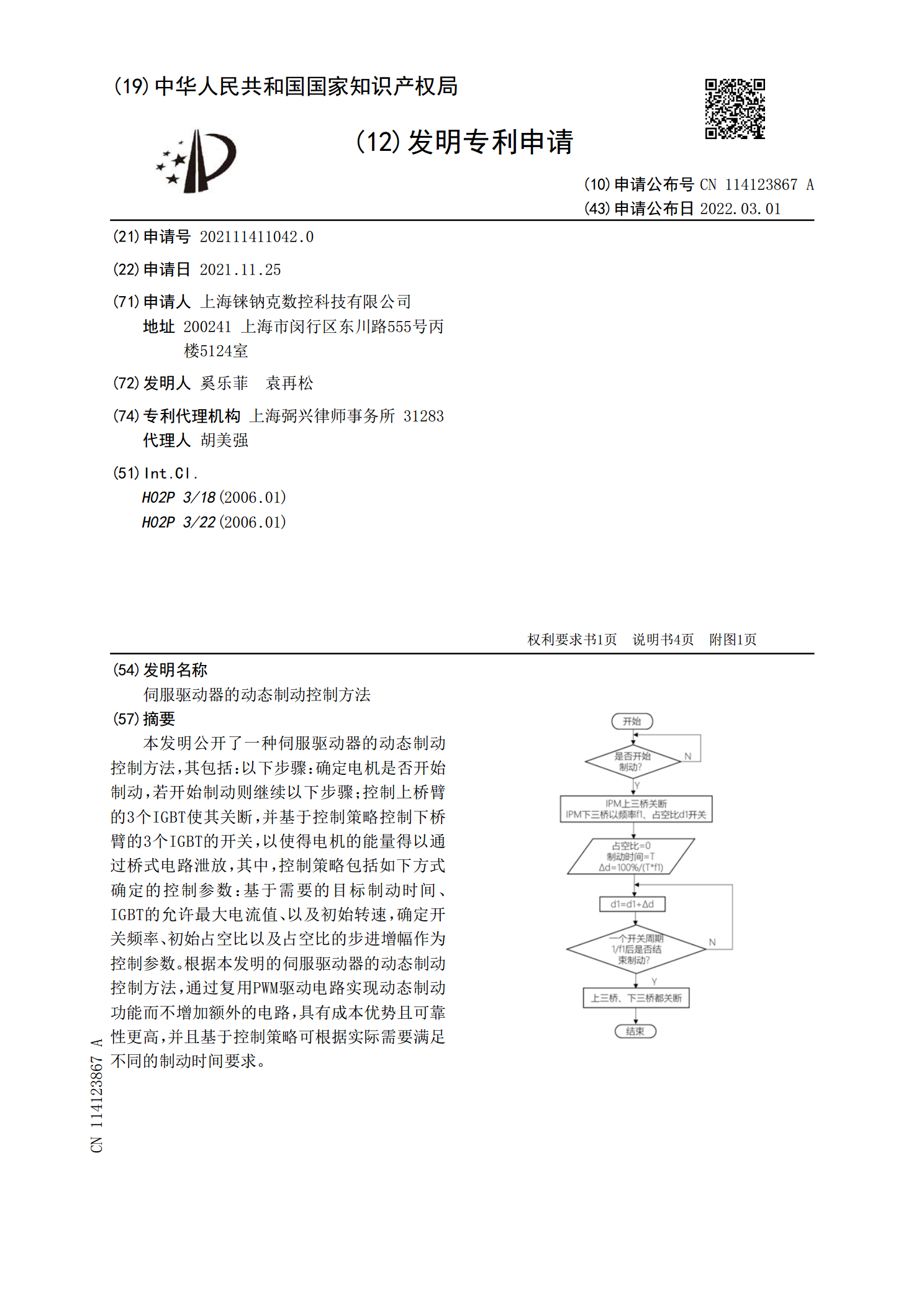
伺服驱动器的动态制动控制方法.pdf
本发明公开了一种伺服驱动器的动态制动控制方法,其包括:以下步骤:确定电机是否开始制动,若开始制动则继续以下步骤;控制上桥臂的3个IGBT使其关断,并基于控制策略控制下桥臂的3个IGBT的开关,以使得电机的能量得以通过桥式电路泄放,其中,控制策略包括如下方式确定的控制参数:基于需要的目标制动时间、IGBT的允许最大电流值、以及初始转速,确定开关频率、初始占空比以及占空比的步进增幅作为控制参数。根据本发明的伺服驱动器的动态制动控制方法,通过复用PWM驱动电路实现动态制动功能而不增加额外的电路,具有成本优势且可