
智能汽车换道轨迹规划曲线研究.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

智能汽车换道轨迹规划曲线研究.docx
智能汽车换道轨迹规划曲线研究智能汽车换道轨迹规划曲线研究摘要:随着智能汽车技术的不断发展,自动驾驶功能正逐渐成为现实。而其中一个重要的技术挑战就是智能汽车换道轨迹规划。本文将从轨迹规划的基本要求、交通环境感知、路径生成和轨迹跟踪这几个方面进行讨论,旨在提供一种更有效、安全的智能汽车换道轨迹规划方法。引言:智能汽车的出现使交通出行更加便捷、高效以及安全。在交通中,换道是汽车行驶过程中的常见场景。然而,人类驾驶员在换道时会根据周围车辆的位置、速度和目的地等信息做出决策,而这对于智能汽车来说是一项复杂的任务。智

智能汽车换道轨迹规划曲线研究.pptx
,目录PartOne换道轨迹规划曲线定义换道轨迹规划曲线的重要性换道轨迹规划曲线的研究现状PartTwo基于几何学的方法基于运动学的方法基于动力学的方法基于人工智能的方法PartThree安全性评估舒适性评估效率性评估实时性评估PartFour基于梯度的优化算法基于模拟退火的优化算法基于遗传的优化算法基于深度学习的优化算法PartFive智能汽车换道轨迹规划曲线在自动驾驶中的应用智能汽车换道轨迹规划曲线在V2X通信中的应用智能汽车换道轨迹规划曲线未来发展方向THANKS
智能汽车换道时长预测及拟人化轨迹规划方法.pdf
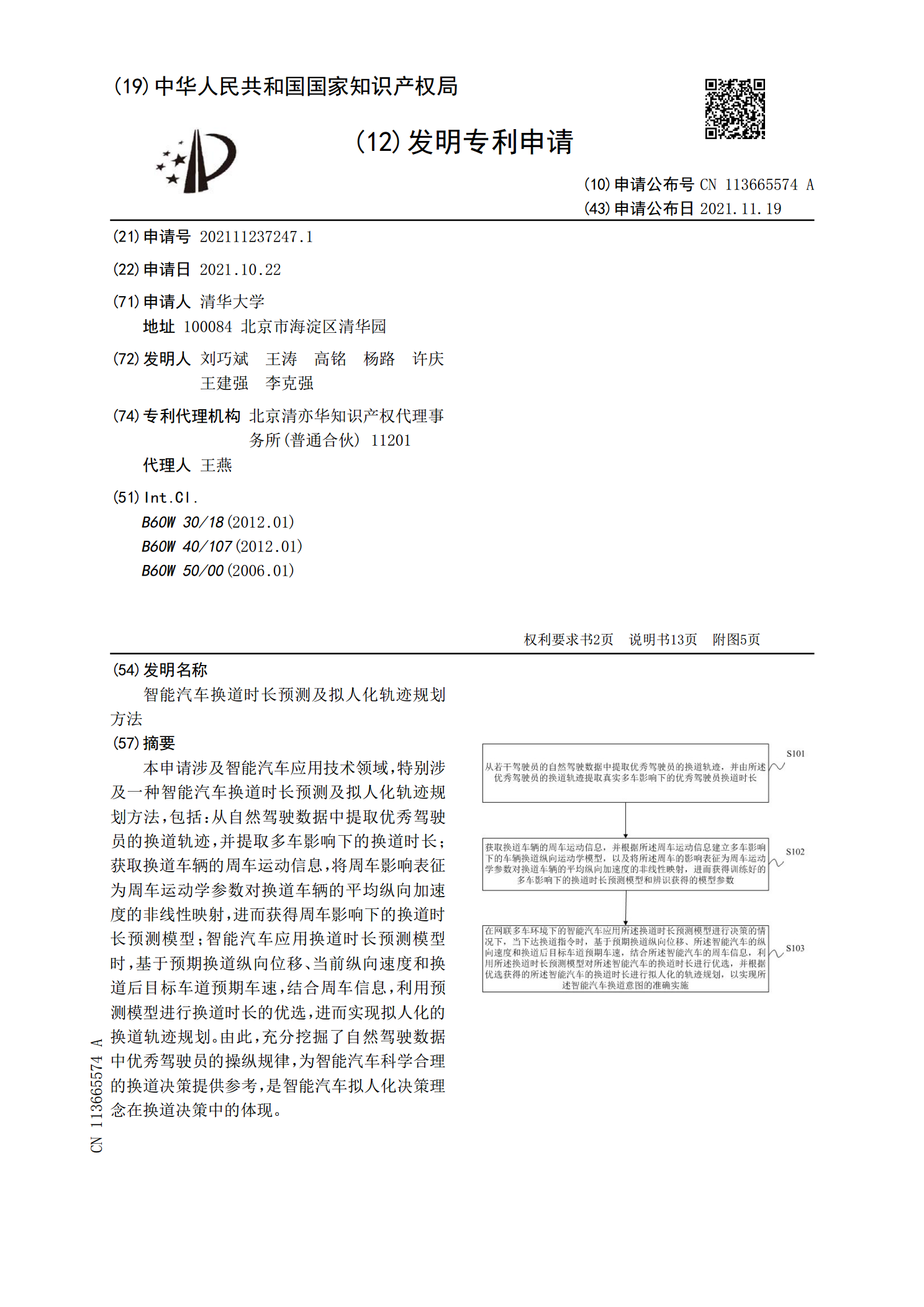
本申请涉及智能汽车应用技术领域,特别涉及一种智能汽车换道时长预测及拟人化轨迹规划方法,包括:从自然驾驶数据中提取优秀驾驶员的换道轨迹,并提取多车影响下的换道时长;获取换道车辆的周车运动信息,将周车影响表征为周车运动学参数对换道车辆的平均纵向加速度的非线性映射,进而获得周车影响下的换道时长预测模型;智能汽车应用换道时长预测模型时,基于预期换道纵向位移、当前纵向速度和换道后目标车道预期车速,结合周车信息,利用预测模型进行换道时长的优选,进而实现拟人化的换道轨迹规划。由此,充分挖掘了自然驾驶数据中优秀驾驶员的操

智能汽车换道避障路径规划与跟踪控制研究.docx
智能汽车换道避障路径规划与跟踪控制研究智能汽车换道避障路径规划与跟踪控制研究摘要:智能汽车的发展在近年来取得了巨大的进展。其中,换道避障是智能汽车行驶过程中重要的一项功能。本文针对智能汽车换道避障问题展开研究,主要涉及路径规划和跟踪控制两个方面。首先,介绍了智能汽车的背景和发展现状,以及换道避障的意义和应用场景。然后,分析了智能汽车换道避障技术的研究现状和挑战。接下来,详细阐述了路径规划方面的研究内容,包括地图建模、环境感知、路径生成和评估等。最后,介绍了跟踪控制方面的研究内容,包括车辆动力学建模、控制器
一种考虑周边车辆的智能汽车换道决策与轨迹规划方法、系统.pdf
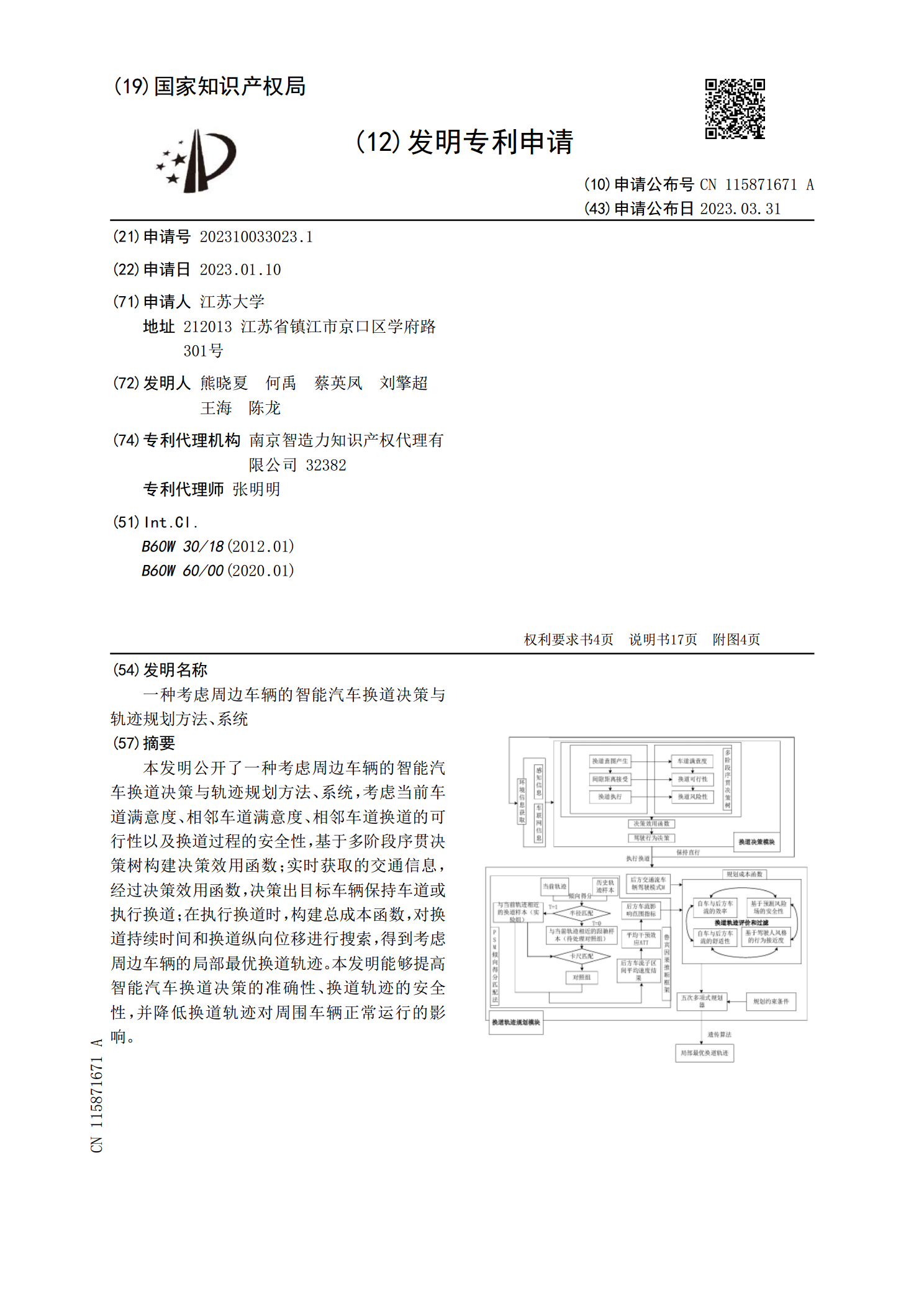
本发明公开了一种考虑周边车辆的智能汽车换道决策与轨迹规划方法、系统,考虑当前车道满意度、相邻车道满意度、相邻车道换道的可行性以及换道过程的安全性,基于多阶段序贯决策树构建决策效用函数;实时获取的交通信息,经过决策效用函数,决策出目标车辆保持车道或执行换道;在执行换道时,构建总成本函数,对换道持续时间和换道纵向位移进行搜索,得到考虑周边车辆的局部最优换道轨迹。本发明能够提高智能汽车换道决策的准确性、换道轨迹的安全性,并降低换道轨迹对周围车辆正常运行的影响。