
斗轮堆取料机防碰撞保护的研究.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

斗轮堆取料机防碰撞保护的研究.docx
斗轮堆取料机防碰撞保护的研究随着科技的不断发展,机器人技术在现代工业生产中的应用越来越广泛,斗轮堆取料机也成为了现代工业生产中不可或缺的一部分。然而,在斗轮堆取料机的操作过程中,碰撞现象时有发生,严重影响了生产效率。因此,斗轮堆取料机防碰撞保护的研究显得尤为重要。一、斗轮堆取料机的工作原理斗轮堆取料机,即斗轮堆取料系统,工作原理是通过开车前端装置,即斗轮器,对破碎的岩石进行取料,然后将大块岩石转移到卸料机构,再通过机械手臂扔到矿石运输车上。该系统由斗轮架、传动装置、斗轮、卸料机构、机械手臂等多个部分组成。
一种斗轮堆取料机的分料装置及斗轮堆取料机.pdf
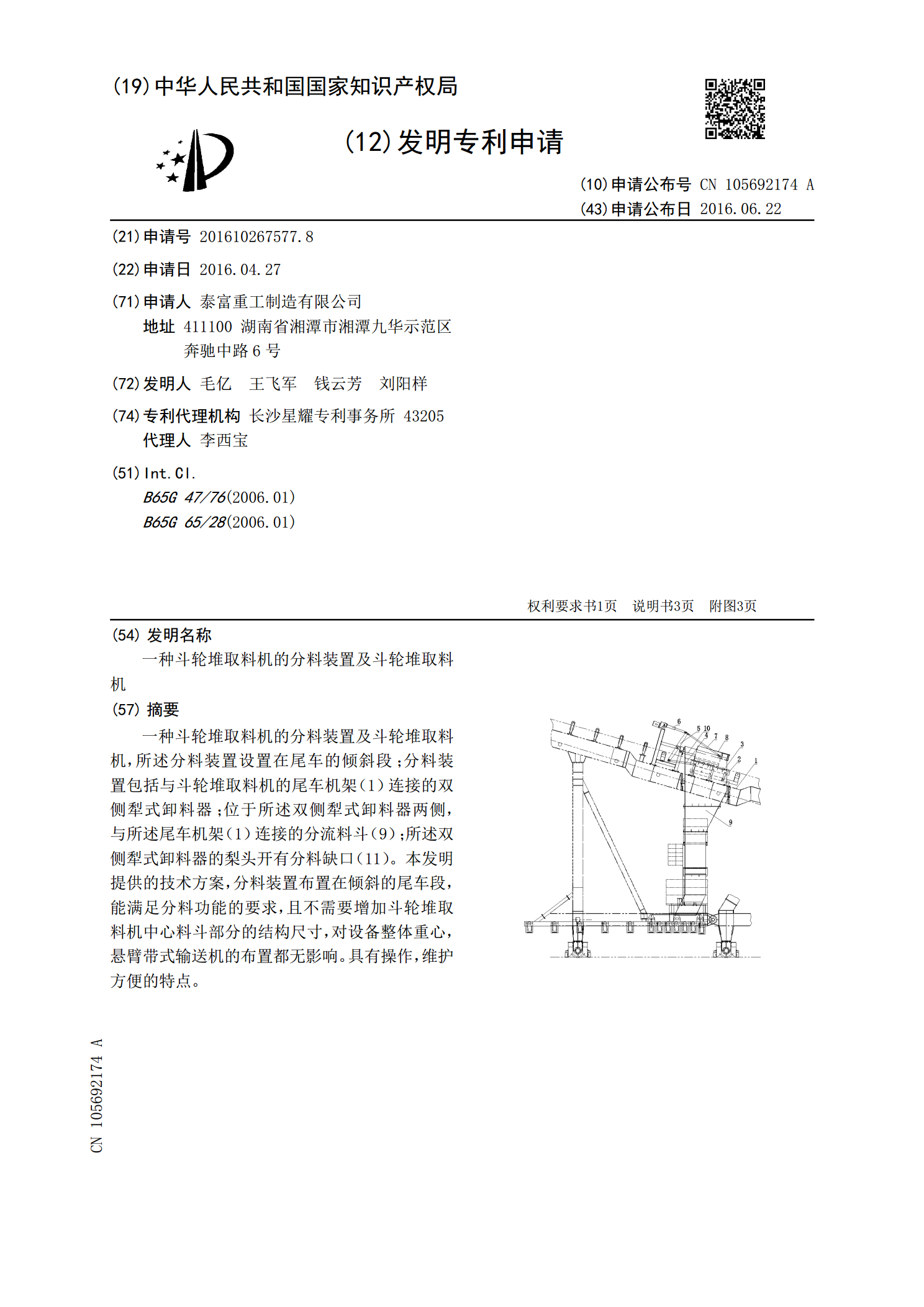
一种斗轮堆取料机的分料装置及斗轮堆取料机,所述分料装置设置在尾车的倾斜段;分料装置包括与斗轮堆取料机的尾车机架(1)连接的双侧犁式卸料器;位于所述双侧犁式卸料器两侧,与所述尾车机架(1)连接的分流料斗(9);所述双侧犁式卸料器的梨头开有分料缺口(11)。本发明提供的技术方案,分料装置布置在倾斜的尾车段,能满足分料功能的要求,且不需要增加斗轮堆取料机中心料斗部分的结构尺寸,对设备整体重心,悬臂带式输送机的布置都无影响。具有操作,维护方便的特点。
斗轮堆取料机.pdf
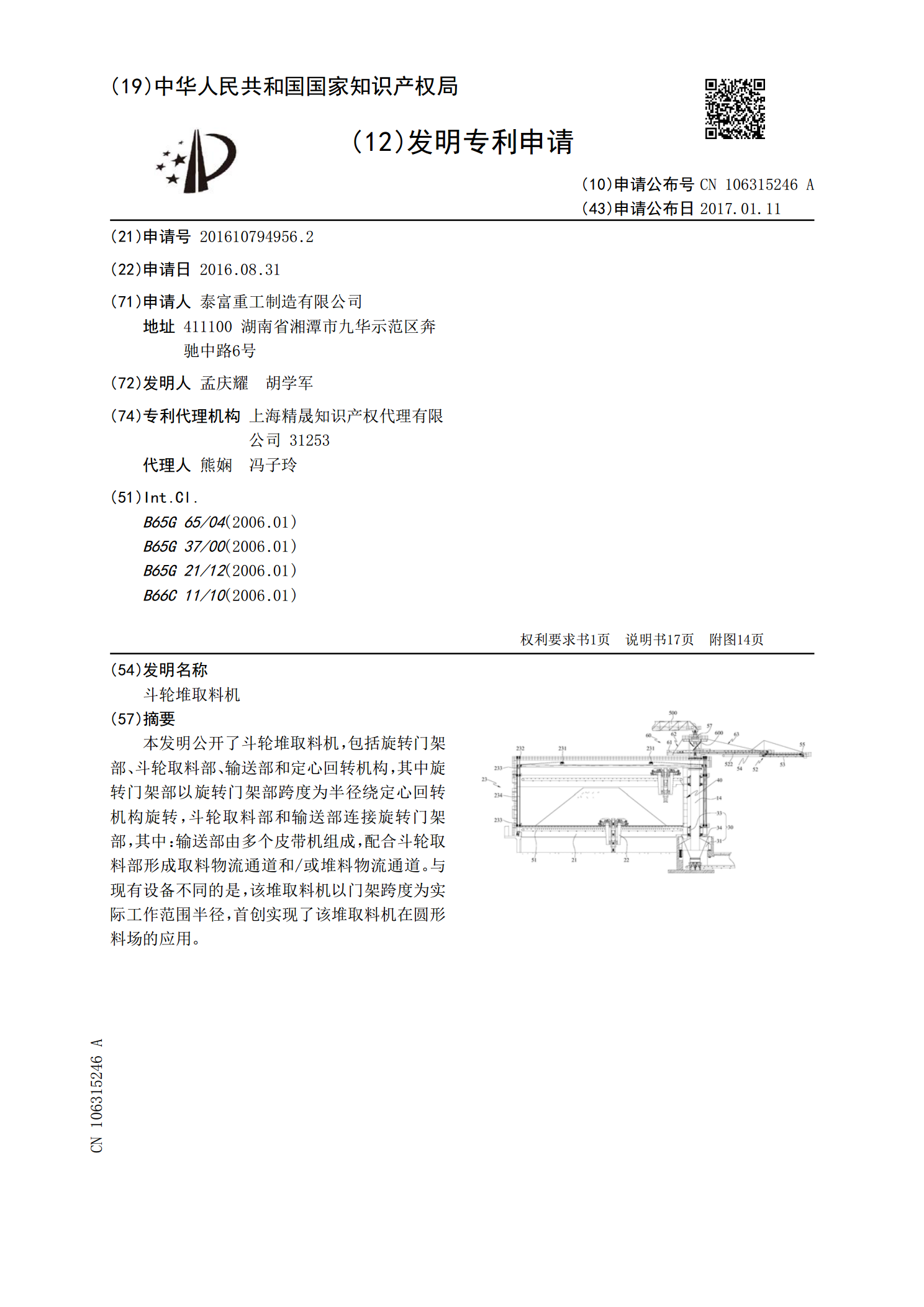
本发明公开了斗轮堆取料机,包括旋转门架部、斗轮取料部、输送部和定心回转机构,其中旋转门架部以旋转门架部跨度为半径绕定心回转机构旋转,斗轮取料部和输送部连接旋转门架部,其中:输送部由多个皮带机组成,配合斗轮取料部形成取料物流通道和/或堆料物流通道。与现有设备不同的是,该堆取料机以门架跨度为实际工作范围半径,首创实现了该堆取料机在圆形料场的应用。

斗轮堆取料机.pdf
本发明公开了一种斗轮堆取料机,设置有回转平台、前臂架和俯仰油缸,所述俯仰油缸的一端与回转平台铰接,另一端与前臂架铰接;所述前臂架和回转平台之间设置有自锁机构,所述自锁机构用于阻止前臂架在下极限位置继续俯下并阻止前臂架在上极限位置继续仰起。该斗轮堆取料机设置有自锁机构,在上极限位置时,自锁机构可以阻止前臂架继续仰起进而防止前臂架过度仰起导致翻转,在下极限位置时,自锁机构可以阻止前臂架继续俯下进而防止前臂架过度俯下导致翻转。因此,与现有技术相比,该斗轮堆取料机的安全性更高。

斗轮堆取料机.docx
第三章斗轮堆取料机一、概述煤场机械的种类很多,常用的有:斗轮堆取料机、门式滚轮机及装卸桥。煤场机械形式的选择,取决于煤场的形状。斗轮堆取料机常用于条形煤场中。斗轮堆取料机是在斗轮挖掘机的基础上发展起来的,是一种大型、连续、高效的散料装卸机械。它具有生产效率高、能耗低、自重轻、投资省及操作简便等优点。斗轮机的形式很多,其分类方法也较多。按行走机构的形式,斗轮堆取料机可分为履带式、轮胎式及轨道式三种;按斗轮臂架的平衡方式,斗轮堆取料机可分为活配重式、死配重式及整体平衡式三种;按理论生产能力,斗轮堆取料机可分为