
基于点线结合特征的单目视觉里程计.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于点线结合特征的单目视觉里程计.docx
基于点线结合特征的单目视觉里程计基于点线结合特征的单目视觉里程计摘要:单目视觉里程计是自主导航和定位关键技术之一,广泛应用于无人车、无人机、机器人等领域。在单目视觉里程计中,特征提取与特征匹配是实现精确里程计估计的核心问题。传统的特征提取方法常使用角点、局部纹理等特征,但会受到光照变化、物体遮挡等因素的影响。本文提出一种基于点线结合特征的单目视觉里程计方法,在特征提取和匹配过程中,结合角点和线条特征,提高鲁棒性和准确性。实验结果表明,该方法在光照变化和部分遮挡情况下,能够获得较好的视觉里程计测量结果。关键
基于顶视点线特征融合的单目相机视觉里程计初始化方法.pdf
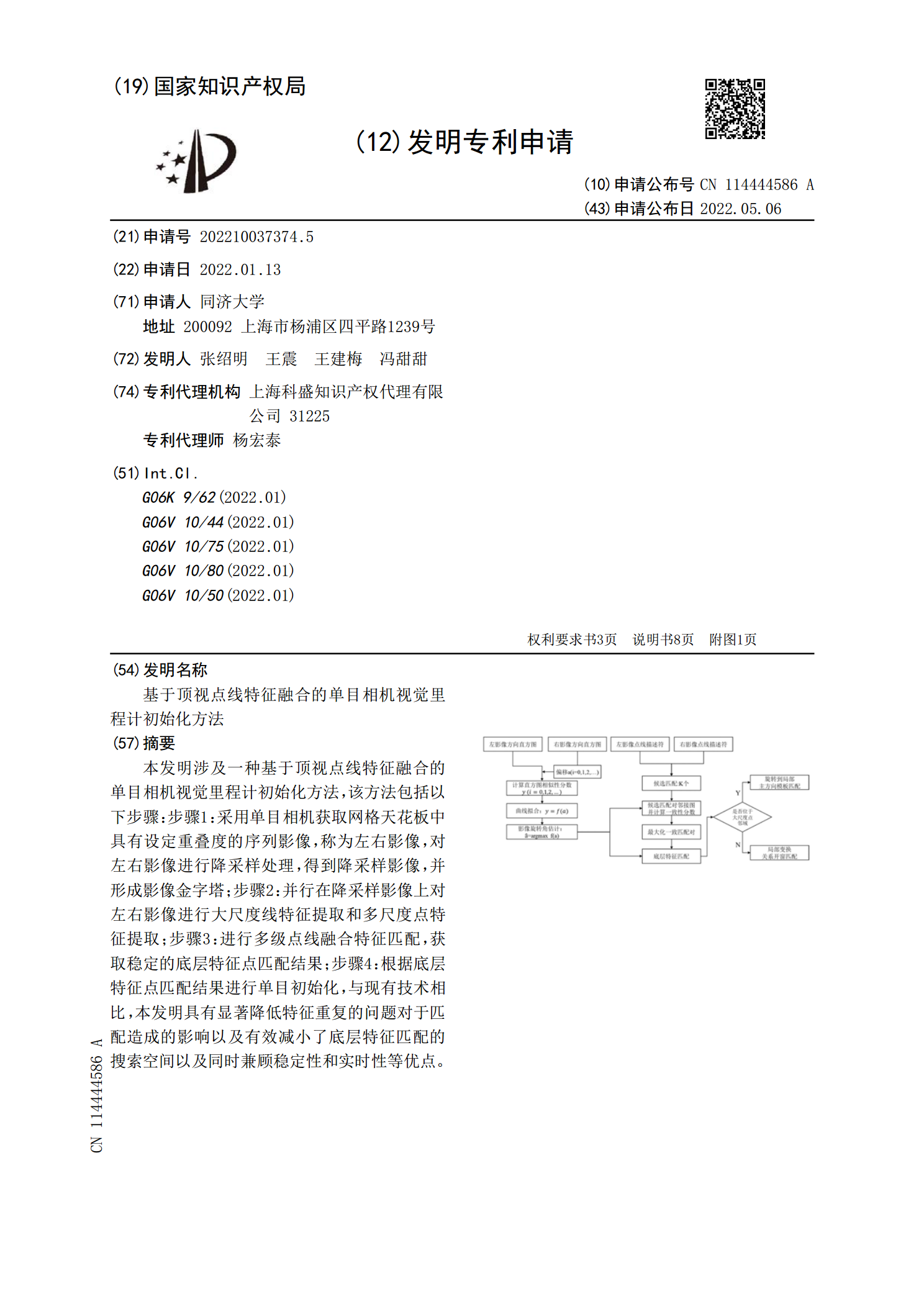
本发明涉及一种基于顶视点线特征融合的单目相机视觉里程计初始化方法,该方法包括以下步骤:步骤1:采用单目相机获取网格天花板中具有设定重叠度的序列影像,称为左右影像,对左右影像进行降采样处理,得到降采样影像,并形成影像金字塔;步骤2:并行在降采样影像上对左右影像进行大尺度线特征提取和多尺度点特征提取;步骤3:进行多级点线融合特征匹配,获取稳定的底层特征点匹配结果;步骤4:根据底层特征点匹配结果进行单目初始化,与现有技术相比,本发明具有显著降低特征重复的问题对于匹配造成的影响以及有效减小了底层特征匹配的搜索空间

基于单目深度估计的视觉里程计算法.docx
基于单目深度估计的视觉里程计算法基于单目深度估计的视觉里程计算法摘要:视觉里程计是指通过摄像头观察环境来估计运动的方法。传统的视觉里程计算法通常基于特征点匹配或特征描述符来求解相机的位姿变化。然而,这些方法在遇到低纹理、光照变化或者动态物体的情况下效果不佳。近年来,随着深度学习的兴起,基于单目深度估计的视觉里程计算法逐渐受到关注。本论文旨在介绍目前流行的基于单目深度估计的视觉里程计算法,并分析其优缺点,最后展望未来的研究方向。关键词:视觉里程计、单目深度估计、深度学习、特征点匹配、特征描述符1.引言视觉里

基于单目深度估计的低功耗视觉里程计.pptx
基于单目深度估计的低功耗视觉里程计目录添加章节标题单目深度估计技术深度估计原理单目深度估计方法算法优化与实现精度与效率评估低功耗视觉里程计系统系统架构与组成传感器数据处理里程计算法实现系统功耗优化实验与验证实验场景与数据集实验方法与过程实验结果与分析性能对比与优势分析应用前景与挑战自动驾驶领域应用移动机器人领域应用技术挑战与发展趋势低功耗技术的未来发展结论与展望研究成果总结未来研究方向展望THANKYOU

基于深度学习特征点法的单目视觉里程计.pptx
添加副标题目录PART01PART02视觉里程计定义视觉里程计原理特征点提取方法深度学习在视觉里程计中的应用PART03深度学习算法介绍特征点检测算法特征点匹配算法深度学习模型训练与优化PART04图像预处理特征点提取特征点匹配与跟踪位姿估计与优化实时性处理与优化PART05实验数据集介绍实验设置与参数调整实验结果展示结果分析比较与讨论PART06研究结论总结研究局限性与不足之处未来研究方向与展望感谢您的观看