
基于航迹推算的全向移动机器人定位及磁导航的研究的任务书.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于航迹推算的全向移动机器人定位及磁导航的研究的任务书.docx
基于航迹推算的全向移动机器人定位及磁导航的研究的任务书任务书一、任务背景和目的全向移动机器人是一种能够在任意方向上运动的机器人,它由多个轮子组成,能够实现平移、旋转等多种运动方式,广泛应用于制造业、医疗、安防等领域。然而,全向移动机器人在室内定位和导航方面还存在一些难题,如何精确地定位机器人的位置,如何在室内环境中实现准确导航等问题亟待解决。本研究旨在基于航迹推算的方法,研究全向移动机器人的定位问题,在此基础上探讨磁导航在机器人导航中的应用。二、研究内容和研究方法1.研究内容(1)全向移动机器人的轨迹推算

基于磁导航的全向AGV定位技术研究.docx
基于磁导航的全向AGV定位技术研究一、概述全向自动导引车(AGV)是一种能够自主规划路径并自主运动的机器人系统。在现代工业生产中,机器人的应用越来越广泛,尤其是在物流配送、生产流程等方面,机器人可以极大地提高效率和质量,减少不必要的人工干预。AGV作为一种常见的移动式机器人系统,在各种工业生产中都有着广泛的应用,主要用于零部件的运输和装配,以及物流系统的自动化管理等。在AGV中,精确的定位技术是非常重要的,因为只有准确地了解机器人自身的位置和运动状态,才能实现对路径规划的准确控制。磁导航是一种常见的AGV

三轮全向移动机器人的航迹推算定位方法.docx
三轮全向移动机器人的航迹推算定位方法标题:三轮全向移动机器人的航迹推算定位方法摘要:在现代工业与服务领域,移动机器人扮演着重要的角色。然而,准确而高效的定位对于机器人的导航和路径规划至关重要。本论文研究了三轮全向移动机器人的航迹推算定位方法,结合传感器数据和运动模型,提出了一种基于卡尔曼滤波的定位算法,并通过实验验证了其性能。引言:随着科技的发展,移动机器人在诸多领域得到了广泛应用,如仓储物流、家庭服务、医疗护理等。移动机器人在复杂环境中导航和定位是其基本功能,而全向移动机器人由于其良好的机动性能和操控性
一种基于运动分解的移动机器人航迹推算定位方法.pdf
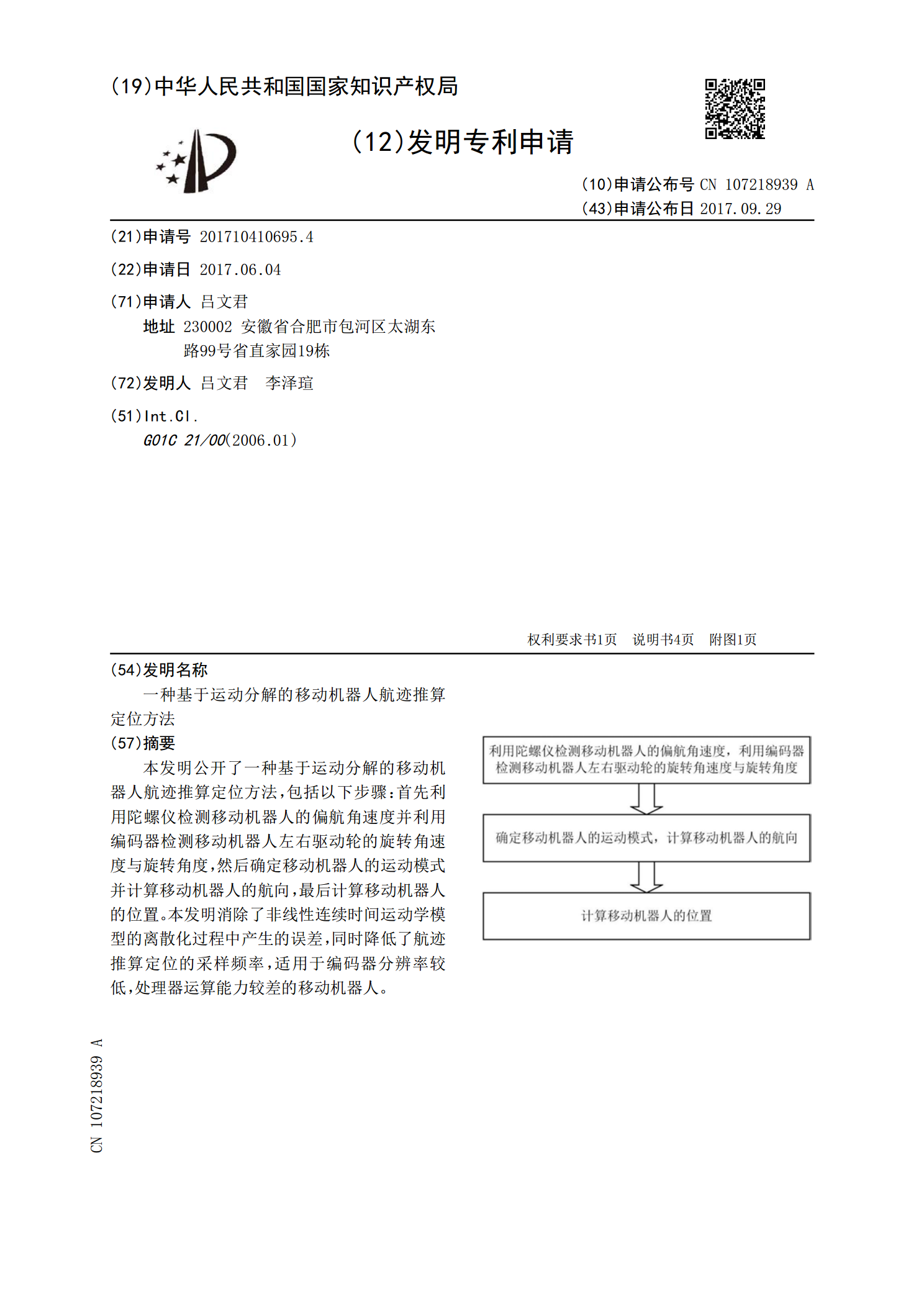
本发明公开了一种基于运动分解的移动机器人航迹推算定位方法,包括以下步骤:首先利用陀螺仪检测移动机器人的偏航角速度并利用编码器检测移动机器人左右驱动轮的旋转角速度与旋转角度,然后确定移动机器人的运动模式并计算移动机器人的航向,最后计算移动机器人的位置。本发明消除了非线性连续时间运动学模型的离散化过程中产生的误差,同时降低了航迹推算定位的采样频率,适用于编码器分辨率较低,处理器运算能力较差的移动机器人。

基于惯性导航的全向AGV定位系统研究与设计.docx
基于惯性导航的全向AGV定位系统研究与设计摘要:全向AGV(全向自动导引车)是一种能够自主实现路径规划、避障和定位等功能的智能移动机器人。而定位是全向AGV系统中的一个关键问题,直接影响着系统的导航精度和效果。本文以惯性导航技术为基础,研究和设计了一种全向AGV定位系统,通过搜集惯性传感器数据,利用卡尔曼滤波算法进行数据融合,来提高定位精度和稳定性。实验结果表明,该系统能够在复杂环境中实现准确的定位效果。关键词:全向AGV;定位;惯性导航;卡尔曼滤波算法1.引言随着自动化技术的不断发展和应用,全向AGV作