
具有实时避障能力的UUV编队技术设计与研究.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

具有实时避障能力的UUV编队技术设计与研究.docx
具有实时避障能力的UUV编队技术设计与研究摘要:海底无人水下车辆(UUV)的使用在海洋资源开发和海洋科学研究中起着重要的作用。为了提高UUV的自主性和能够在复杂环境中进行任务,UUV编队技术逐渐成为一个热门的研究方向。本文主要研究具有实时避障能力的UUV编队技术的设计和实验。首先,介绍了UUV编队技术的背景和研究现状。然后,讨论了UUV编队中的通信、定位和控制问题。接下来,提出了一种基于避障算法的UUV编队控制方法,并设计了相应的实验平台。最后,通过实验验证了该方法的性能。实验结果表明,该方法能够实现UU

基于模糊控制的UUV编队避障研究.docx
基于模糊控制的UUV编队避障研究摘要:本文研究了基于模糊控制的无人水下车辆(UUV)编队避障技术。首先介绍了UUV的概念和应用场景,然后分析了UUV编队中常见的障碍物避免问题。在此基础上,提出了基于模糊控制的避障算法,并通过实验验证了算法的有效性。最后,总结了本文的研究成果和未来研究方向。关键词:无人水下车辆;模糊控制;编队避障一、引言无人水下车辆(UUV)是一种无人驾驶的水下航行器,具有灵活性和可控性高的优点,应用广泛。近年来,随着UUV的技术发展,越来越多的UUV被应用于海底勘探、环境监测、海底管道维

基于人工势场的UAV编队避障研究.docx
基于人工势场的UAV编队避障研究摘要:无人机编队技术已经成为了当前无人机技术发展的重要领域。其中,无人机编队避障技术是无人机编队实施飞行任务的重要保障。本文主要探讨了基于人工势场的UAV编队避障研究,重点介绍了基于人工势场的无人机编队避障的原理及算法,并结合实例进行了模拟验证。关键词:无人机编队;避障;人工势场一、引言随着无人机技术的不断发展,无人机编队技术已经成为了当前无人机技术发展的重要领域。无人机编队技术可以实现多架无人机在同一个空域内协调飞行,从而实现统一调度和指挥控制,达到优化垂直起降、提高空战

动态环境下多船编队及避障研究的中期报告.docx
动态环境下多船编队及避障研究的中期报告一、研究背景随着全球化的发展,海上贸易的增长,多船编队已成为船舶运营的一种趋势。同时,现代船舶越来越注重自动化运行,因此多船编队技术的研究也越来越重要。在动态环境下,多船编队的运行面临着许多挑战,如避障、协调、路径规划等。因此,为了提高多船编队的安全性和效率,需要研究多船编队的运行规则和避障算法。二、研究内容本研究的主要内容包括:1.多船编队的控制策略研究:设计适用于动态环境下的多船编队控制策略,提高航行的安全性和效率。2.多船编队的路径规划研究:通过对多船编队的运动
一种编队避障方法及装置.pdf
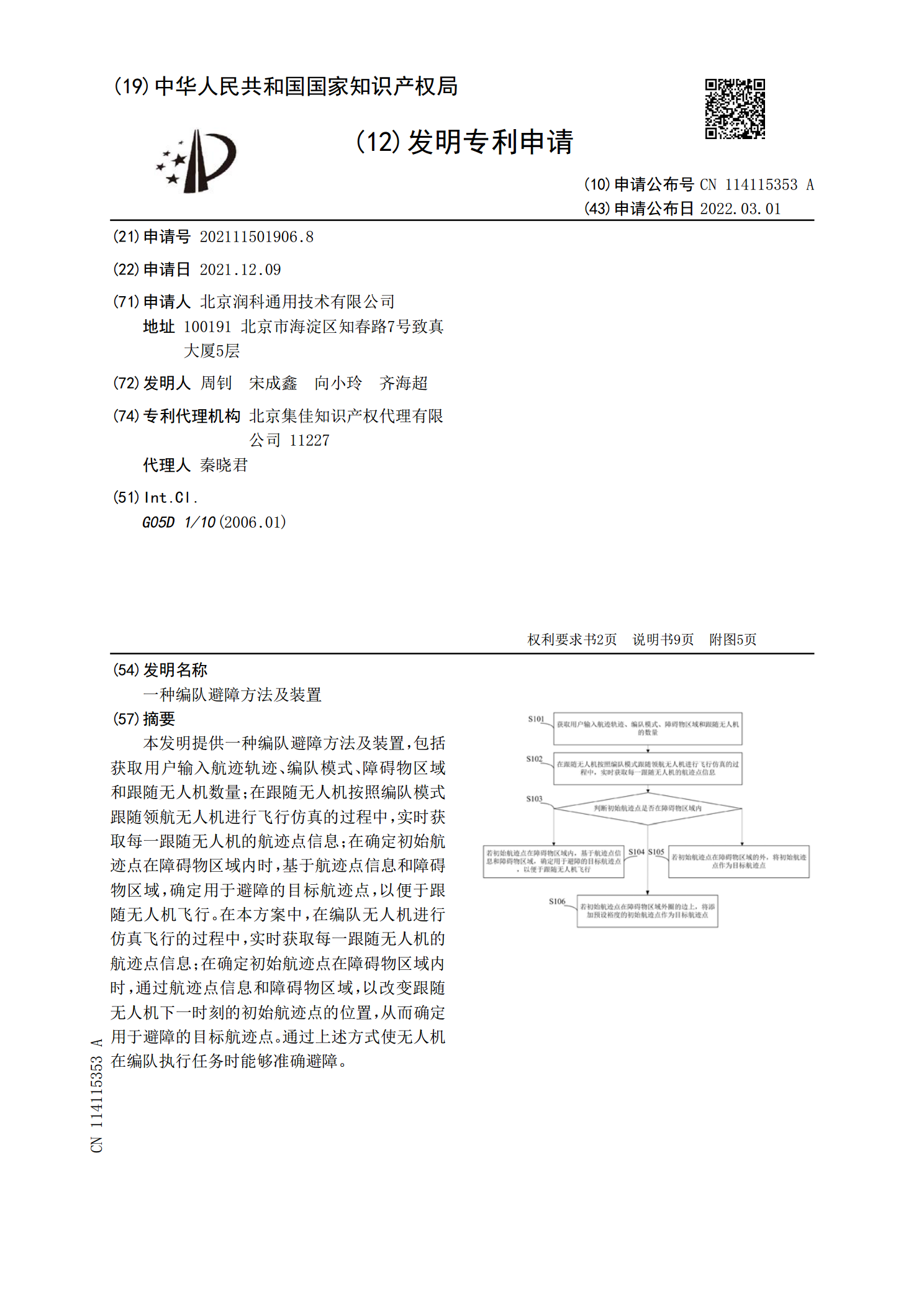
本发明提供一种编队避障方法及装置,包括获取用户输入航迹轨迹、编队模式、障碍物区域和跟随无人机数量;在跟随无人机按照编队模式跟随领航无人机进行飞行仿真的过程中,实时获取每一跟随无人机的航迹点信息;在确定初始航迹点在障碍物区域内时,基于航迹点信息和障碍物区域,确定用于避障的目标航迹点,以便于跟随无人机飞行。在本方案中,在编队无人机进行仿真飞行的过程中,实时获取每一跟随无人机的航迹点信息;在确定初始航迹点在障碍物区域内时,通过航迹点信息和障碍物区域,以改变跟随无人机下一时刻的初始航迹点的位置,从而确定用于避障的