
一种面向空间机械臂目标定位的注视点估计方法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种面向空间机械臂目标定位的注视点估计方法.docx
一种面向空间机械臂目标定位的注视点估计方法标题:一种面向空间机械臂目标定位的注视点估计方法摘要:随着空间机械臂在各个领域的广泛应用,高精度的目标定位成为关键问题。本论文提出了一种基于注视点估计的目标定位方法,通过计算机视觉和机器学习的技术手段,在给定场景下实现了更精确和可靠的目标定位。实验结果表明,该方法能够提高机械臂的目标定位精度和鲁棒性,为机械臂在各种环境下的应用提供了更好的支持。关键词:空间机械臂、目标定位、注视点估计、计算机视觉、机器学习1.引言目标定位是空间机械臂在各个应用领域中的基础问题之一。

人眼注视点估计方法的研究.docx
人眼注视点估计方法的研究人眼注视点估计方法的研究摘要:人眼注视点估计是计算机视觉和人机交互领域的重要研究方向。准确估计人眼注视点对于理解人的视觉行为、设计有效的用户界面以及改进现有的计算机视觉算法等方面具有重要意义。本文综述了常见的人眼注视点估计方法,包括传统的基于特征提取和机器学习的方法以及近年来基于深度学习的方法。针对不同方法的优缺点,本文还分析了人眼注视点估计方法的应用领域和未来发展趋势。第1节研究背景人眼作为人类最主要的感知器官之一,对于了解人的视觉行为具有重要意义。人眼注视点是指在观察过程中,人

面向人机交互的注视点估计技术研究.docx
面向人机交互的注视点估计技术研究面向人机交互的注视点估计技术研究摘要:随着人机交互技术的快速发展,注视点估计技术成为了研究的一个热点。注视点估计是指通过追踪人眼的注视方向来确定人的注意力所集中的位置。本文主要介绍了注视点估计技术的定义、原理和应用领域,并对当前主流的注视点估计方法进行了详细的介绍和分析。同时,本文还探讨了注视点估计技术面临的挑战和未来的发展方向。关键词:人机交互、注视点估计、眼动追踪、特征提取、机器学习1.引言随着计算机、移动设备和虚拟现实技术的快速发展,人机交互已经成为了现代生活中不可或

一种穿戴式视觉注视目标定位装置及方法.pdf
本发明涉及一种穿戴式视觉注视目标定位装置及方法,硬件部分包括肩背支撑架、转轴及角度传感器、颈部转动卡环、视觉传感器、微处理器,用于数据接收和处理,将装置安置在受试者身上,首先得到头颈位置的角度方位,得到了视觉注视方向,利用颈部转动卡环将视觉传感器与视觉朝向同步,使得视觉传感器与人正视方向保持同步,利用二维机器视觉定位技术和深度信息确定目标物在注视视野中的空间位置,经坐标变换和视觉注视方位信息融合获取被注视目标物的位置信息,然后将三维信息进行坐标转换到需要的应用坐标。本装置可以用于实现人机混合的视觉主动选择
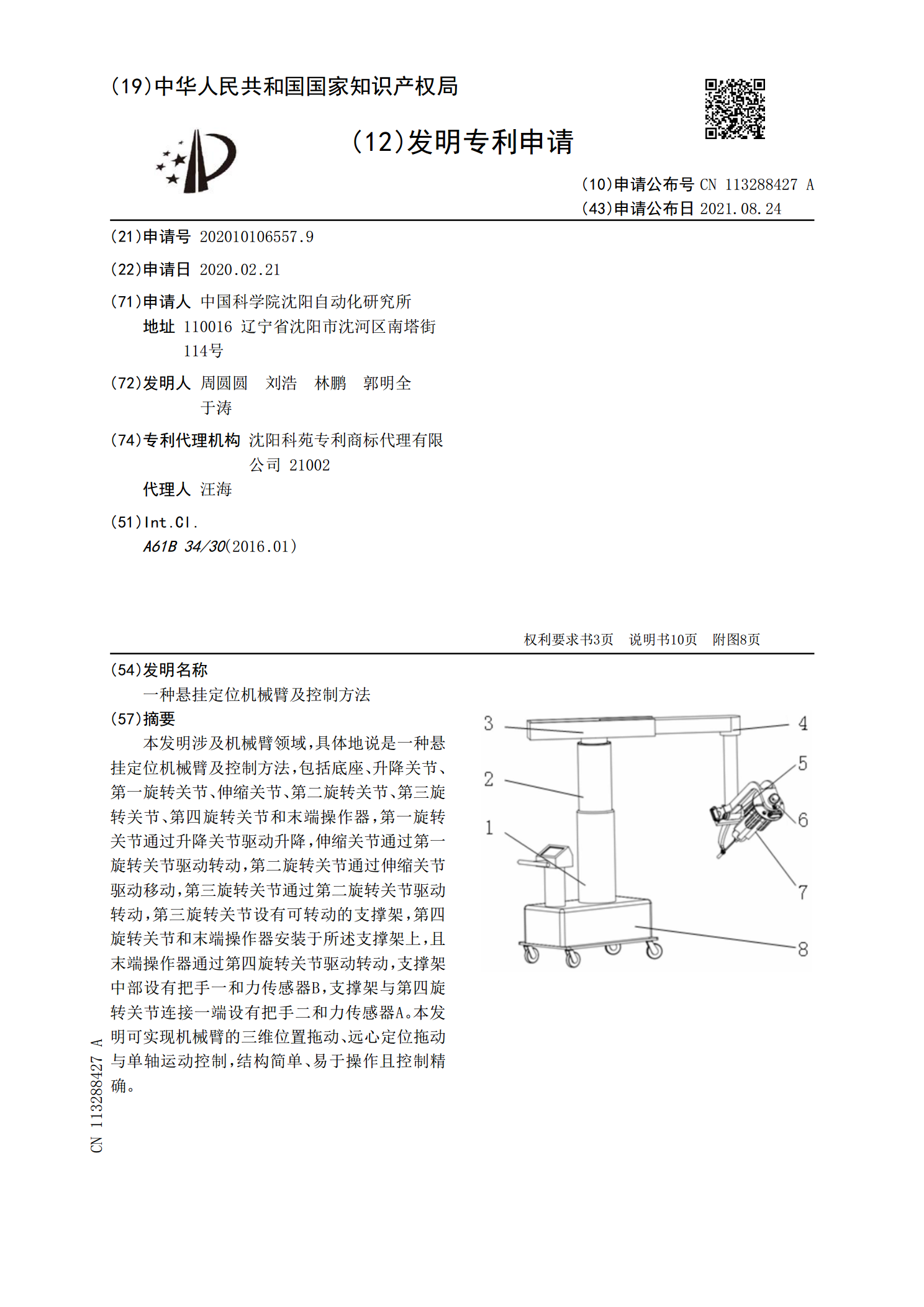
一种悬挂定位机械臂及控制方法.pdf
本发明涉及机械臂领域,具体地说是一种悬挂定位机械臂及控制方法,包括底座、升降关节、第一旋转关节、伸缩关节、第二旋转关节、第三旋转关节、第四旋转关节和末端操作器,第一旋转关节通过升降关节驱动升降,伸缩关节通过第一旋转关节驱动转动,第二旋转关节通过伸缩关节驱动移动,第三旋转关节通过第二旋转关节驱动转动,第三旋转关节设有可转动的支撑架,第四旋转关节和末端操作器安装于所述支撑架上,且末端操作器通过第四旋转关节驱动转动,支撑架中部设有把手一和力传感器B,支撑架与第四旋转关节连接一端设有把手二和力传感器A。本发明可实