
一种穿戴式视觉注视目标定位装置及方法.pdf

宏硕****mo


1/10

2/10
3/10

4/10

5/10

6/10
7/10

8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种穿戴式视觉注视目标定位装置及方法.pdf
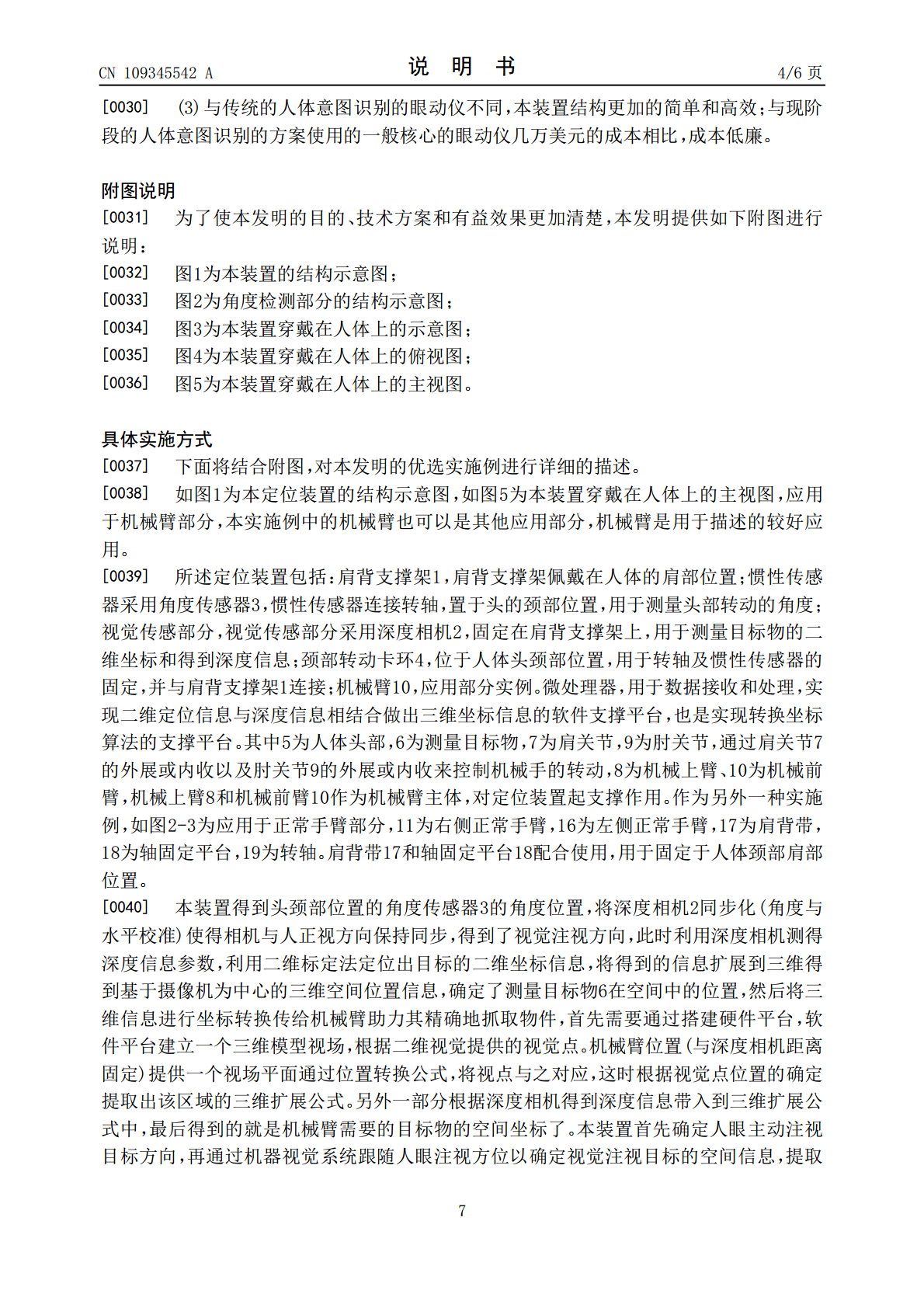
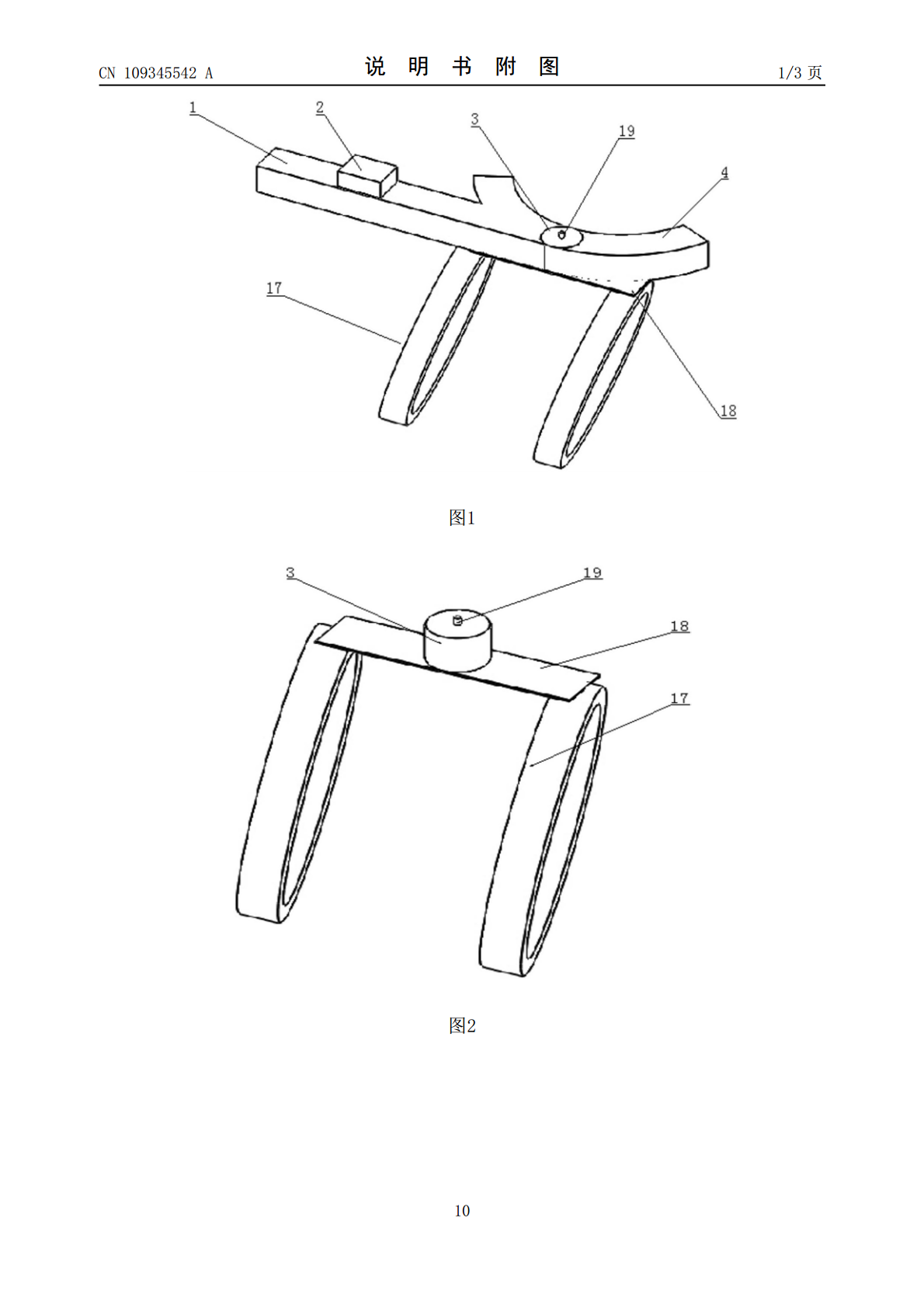
本发明涉及一种穿戴式视觉注视目标定位装置及方法,硬件部分包括肩背支撑架、转轴及角度传感器、颈部转动卡环、视觉传感器、微处理器,用于数据接收和处理,将装置安置在受试者身上,首先得到头颈位置的角度方位,得到了视觉注视方向,利用颈部转动卡环将视觉传感器与视觉朝向同步,使得视觉传感器与人正视方向保持同步,利用二维机器视觉定位技术和深度信息确定目标物在注视视野中的空间位置,经坐标变换和视觉注视方位信息融合获取被注视目标物的位置信息,然后将三维信息进行坐标转换到需要的应用坐标。本装置可以用于实现人机混合的视觉主动选择

定位追踪方法、装置及其穿戴式设备.pdf
本申请提供一种定位追踪方法、系统以及穿戴式设备。定位追踪方法应用于非穿戴式图像显示设备,定位追踪方法包括:获取包含标记物的图像,标记物设置于穿戴式设备上;对图像中的标记物进行识别,并根据标记物确定穿戴式设备与图像显示设备之间的相对空间位置信息;以及根据相对空间位置信息渲染虚拟对象,并在图像显示设备中显示虚拟对象。上述的定位追踪方法中,图像显示设备可通过采集包含集成于穿戴式设备上的标记物的图像,获取标记物的位置信息,以追踪穿戴式设备。

可穿戴式视觉辅助定位系统综述报告.pptx
可穿戴式视觉辅助定位系统01添加章节标题可穿戴式视觉辅助定位系统的概述定义和分类系统的基本组成系统的功能和应用领域可穿戴式视觉辅助定位系统的技术原理视觉定位技术图像识别技术运动跟踪技术传感器技术可穿戴式视觉辅助定位系统的设计和实现系统硬件设计系统软件设计系统集成和测试系统的性能评估和优化可穿戴式视觉辅助定位系统的应用案例医疗领域的应用工业领域的应用娱乐领域的应用安全领域的应用可穿戴式视觉辅助定位系统的发展趋势和挑战技术发展趋势市场发展趋势面临的挑战和问题未来发展方向和前景结论和建议对可穿戴式视觉辅助定位系

一种穿戴式按摩装置及方法.pdf
一种穿戴式按摩装置及方法,包括上衣、裤子两部分,分别包括内衬、气囊和外衣套,气囊设置在内衬和外衣套之间,外衣套表面设置有外部连接件和充气管,充气管连接压力调节器;气囊分为上衣气囊和裤子气囊、外部连接件分为上衣连接件和裤子连接件,充气管分为上衣充气管和裤子充气管;使用时,可以根据需要,对魔术贴子面进行卷伸,子面伸出时覆盖两层拉锁,可极大程度适应使用者的各种体型。裤子部分与上衣部分结构基本相同,裤子部分的双腿内侧设置有魔术贴和两层拉锁调节松紧程度。上衣和裤子内表面有内衬,内衬按人体穴位分布位置设有气囊,气囊通

一种定位连接方法、装置、系统及可穿戴设备.pdf
本发明公开了一种定位连接方法,应用于可穿戴设备,包括:可穿戴设备启动定位连接功能;在与移动终端进行连接时,向所述移动终端发送状态查询指令;其中,所述状态查询包括查询所述移动终端是否处于可连接状态、是否启动定位连接软件以及是否开启定位功能;接收查询结果;根据所述查询结果向用户进行相应的提示,可以实现在定位连接时及时对用户进行有效提示,提升用户体验;本发明还公开了一种定位连接装置、系统以及一种可穿戴设备,具有上述有益效果。