
轮履组合式电动爬楼轮椅的研究.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

轮履组合式电动爬楼轮椅的研究.docx
轮履组合式电动爬楼轮椅的研究轮履组合式电动爬楼轮椅的研究摘要随着社会的不断进步和老龄化人口的增加,人们对于移动性辅助设备的需求也日益增加。电动爬楼轮椅在提供便捷的移动解决方案的同时,也面临着一系列的挑战。本论文基于轮履组合式电动爬楼轮椅的研究,探讨了不同设计参数对其性能的影响,并提出了一种改进的设计方案。1.引言电动爬楼轮椅是一种便于行动不便人士爬升楼梯的移动设备。它的主要功能是通过电力驱动来提供动力,帮助用户爬升和下降楼梯。然而,传统的电动爬楼轮椅存在一些问题,如体积大、重量重、爬升速度慢等。为了克服这

轮履组合式电动爬楼轮椅的研究的任务书.docx
轮履组合式电动爬楼轮椅的研究的任务书任务书项目名称:轮履组合式电动爬楼轮椅的研究项目背景:随着人口老龄化的加剧,现代社会对于老年人和行动不便人士日益增加。在日常生活中,楼梯成为他们最大的障碍之一,脚轮式电动轮椅无法直接上楼梯,因此需要寻求一种能够爬楼梯的轮椅。项目目标:本研究的目标是设计和开发一种轮履组合式电动爬楼轮椅,能够满足老年人和行动不便人士上下楼梯的需求。具体目标如下:1.研究楼梯爬升技术,确定最优的爬升策略。2.设计和制造一种轮履组合式电动爬楼轮椅原型,实现楼梯爬升功能。3.进行性能测试和安全评
一种轮履组合式爬楼梯轮椅.pdf
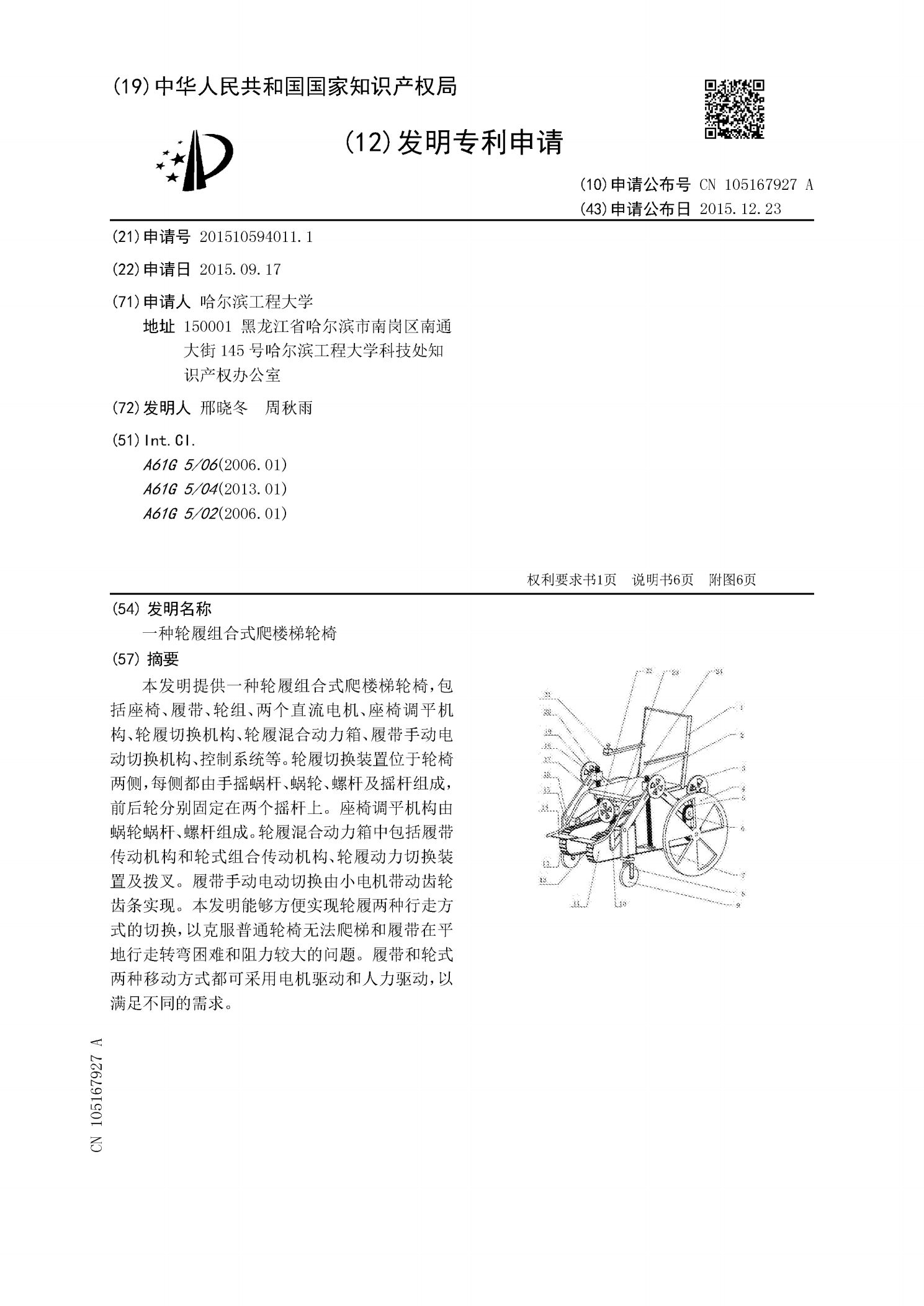
本发明提供一种轮履组合式爬楼梯轮椅,包括座椅、履带、轮组、两个直流电机、座椅调平机构、轮履切换机构、轮履混合动力箱、履带手动电动切换机构、控制系统等。轮履切换装置位于轮椅两侧,每侧都由手摇蜗杆、蜗轮、螺杆及摇杆组成,前后轮分别固定在两个摇杆上。座椅调平机构由蜗轮蜗杆、螺杆组成。轮履混合动力箱中包括履带传动机构和轮式组合传动机构、轮履动力切换装置及拨叉。履带手动电动切换由小电机带动齿轮齿条实现。本发明能够方便实现轮履两种行走方式的切换,以克服普通轮椅无法爬梯和履带在平地行走转弯困难和阻力较大的问题。履带和轮
电动爬楼轮椅.pdf
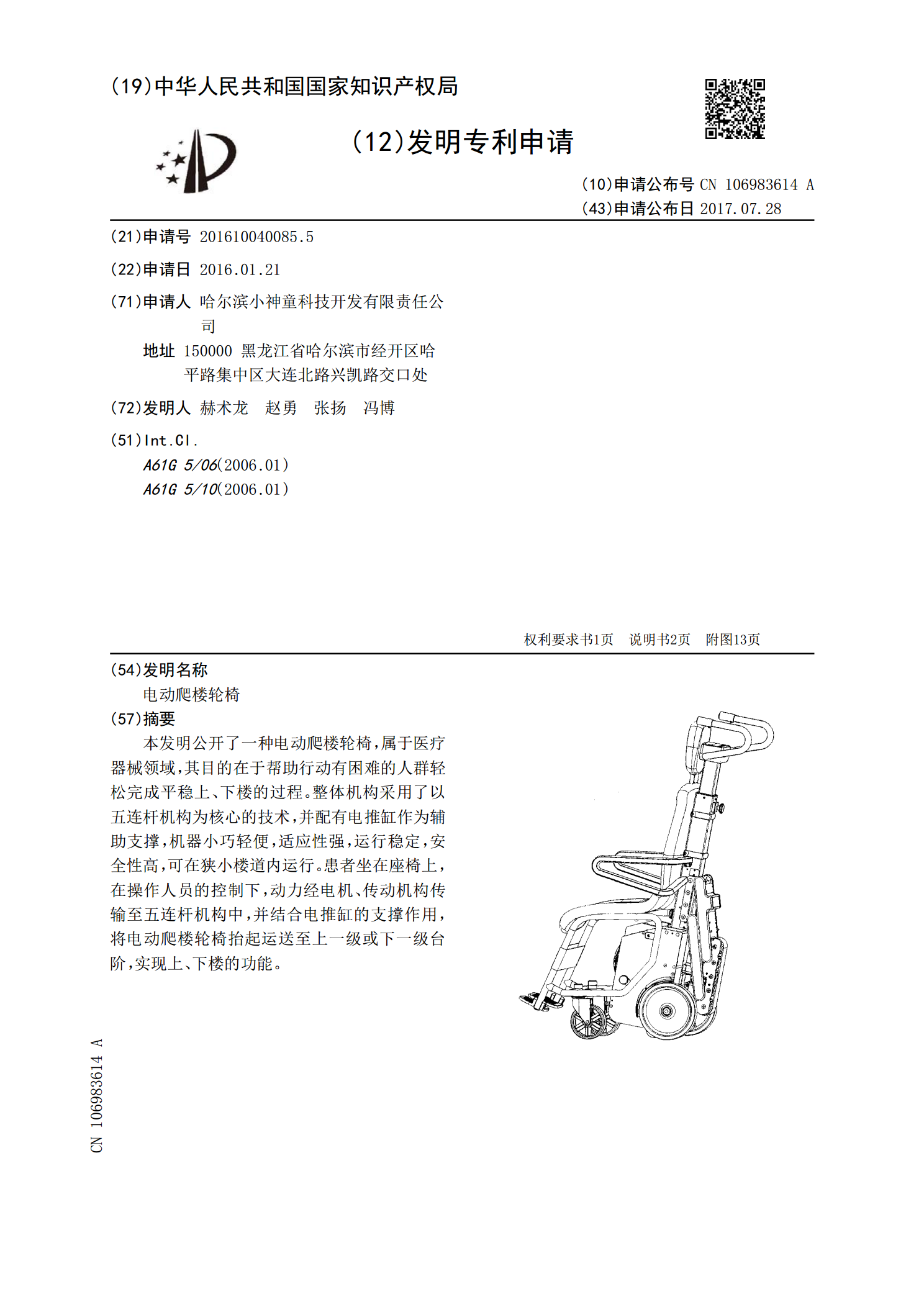
本发明公开了一种电动爬楼轮椅,属于医疗器械领域,其目的在于帮助行动有困难的人群轻松完成平稳上、下楼的过程。整体机构采用了以五连杆机构为核心的技术,并配有电推缸作为辅助支撑,机器小巧轻便,适应性强,运行稳定,安全性高,可在狭小楼道内运行。患者坐在座椅上,在操作人员的控制下,动力经电机、传动机构传输至五连杆机构中,并结合电推缸的支撑作用,将电动爬楼轮椅抬起运送至上一级或下一级台阶,实现上、下楼的功能。

电动爬楼轮椅.pdf
一种电动爬楼轮椅,分护理型和自驾型。其履带行走及驱动机构装于前轮和后轮之间的车架上,前轮装于座椅上,后轮装于后轮升降机构上,座椅与车架铰接,座椅平衡机构与座椅支架铰接,后轮升降机构与车架铰接,蓄电池组件通过控制机构与履带行走电机、座椅平衡电机和后轮升降电机相连接,这三个电机的动力输出端分别通过各自的传动机构与履带行走机构、座椅平衡机构和后轮升降机构相连接。本发明的优点是:既改进了护理型又增加了自驾型;采用了橡胶履带爬楼更安全;履带爬楼改为无极调速,消除了残疾人爬楼时的恐惧感;分这两款车型专门设计了运载电动