
自动电弧焊焊炬运动控制算法研究.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

自动电弧焊焊炬运动控制算法研究.docx
自动电弧焊焊炬运动控制算法研究自动电弧焊(AutomaticArcWelding)是一种常见的焊接方法,它通过控制电弧焊炬的运动来实现焊接过程中的焊缝接合。电弧焊炬的运动控制是实现自动电弧焊的关键技术之一。本文将就自动电弧焊焊炬运动控制算法的研究进行探讨。自动电弧焊焊炬运动控制算法的研究旨在实现高质量的焊接接头,并提高焊接效率。在传统的手工电弧焊过程中,焊工需要手动控制焊炬的运动,这不仅需要丰富的焊接经验,还容易受到焊工个体水平不一的影响。而自动电弧焊则能够消除焊工的人为因素,提高焊接质量和稳定性。自动电
电弧焊炬.pdf
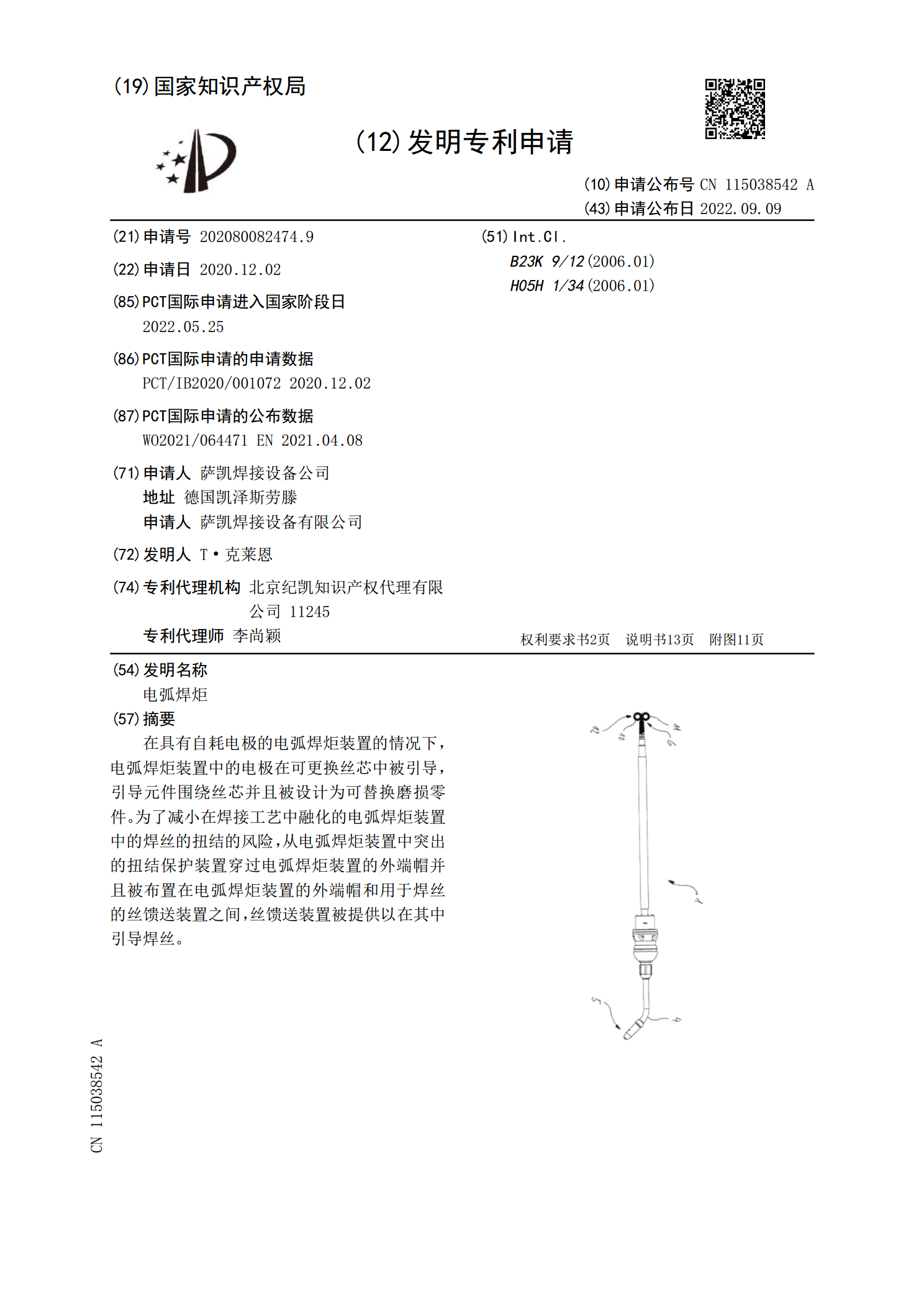
在具有自耗电极的电弧焊炬装置的情况下,电弧焊炬装置中的电极在可更换丝芯中被引导,引导元件围绕丝芯并且被设计为可替换磨损零件。为了减小在焊接工艺中融化的电弧焊炬装置中的焊丝的扭结的风险,从电弧焊炬装置中突出的扭结保护装置穿过电弧焊炬装置的外端帽并且被布置在电弧焊炬装置的外端帽和用于焊丝的丝馈送装置之间,丝馈送装置被提供以在其中引导焊丝。

旋转电弧焊炬.pdf
本发明使用气动涡轮机和用于整个焊炬的冷却系统的原理,其中焊接过程中使用的气体,或甚至压缩空气沿轴向方向通过导管进入耗材,因此移动涡轮机,该涡轮机进而移动喷嘴和喷嘴保持件。焊炬可以在NEMAI级焊机上用于以100%占空比的延长的时间段内,因为焊炬是水冷的。此外,炬可以用于由任何制造商制造的任何焊接电源,无论机器是新的还是很旧的,因为(采用的)欧洲标准是相同的。这意味着不需要获得新的焊机,而仅需要炬。在构造和组装环境中,比如焊接立管,精炼厂,接头焊接,包层和旨在只使用一个焊接耗材构造零件的工艺,所述炬的使用

长输管道双焊炬全位置自动焊设备及工艺研究.docx
长输管道双焊炬全位置自动焊设备及工艺研究随着经济的发展,能源需求日益增长,长输管道已经成为供应能源的重要渠道之一。长输管道的质量和安全至关重要,而双焊炬全位置自动焊设备及工艺则成为保证管道质量和安全的重要手段。一、双焊炬全位置自动焊设备的概念及特点双焊炬全位置自动焊设备是一种针对长输管道进行焊接的设备,利用双焊炬同时进行内、外焊接,实现全位置焊接。该设备具有以下特点:1.操作简单:该设备操作简单易学,使用方便。2.焊接效率高:通过双焊炬同时进行内、外焊接,加快了焊接速度和效率。3.焊接质量高:该设备使用多

自动焊机焊炬角摆机构.pdf
本发明是一种钢件特别是钢质管道自动焊机用的自动焊机焊炬角摆机构。它由动力驱动单元,角摆单元组成,动力驱动单元与角摆单元连接。动力驱动单元的直流减速电机(1)由平键(2)与圆锥齿轮(3)连接,置于齿轮箱体(4)内的大圆锥齿轮(3)与小圆锥齿轮(5)啮合;角摆单元的角摆轴(8)与小圆锥齿轮(5)固连,角摆轴(8)的小端头由轴承(7)安装在齿轮箱体(4)上后由轴承压盖(6)盖封,角摆轴(8)的下部由齿轮箱盖(9)盖封,角摆轴(8)的另一端由轴用挡圈(10)和铜套(11)定位在齿轮箱体(4)上,并由锁紧扳把(13