
PID温度控制.doc

xf****65


1/5

2/5

3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

温度pid控制.docx
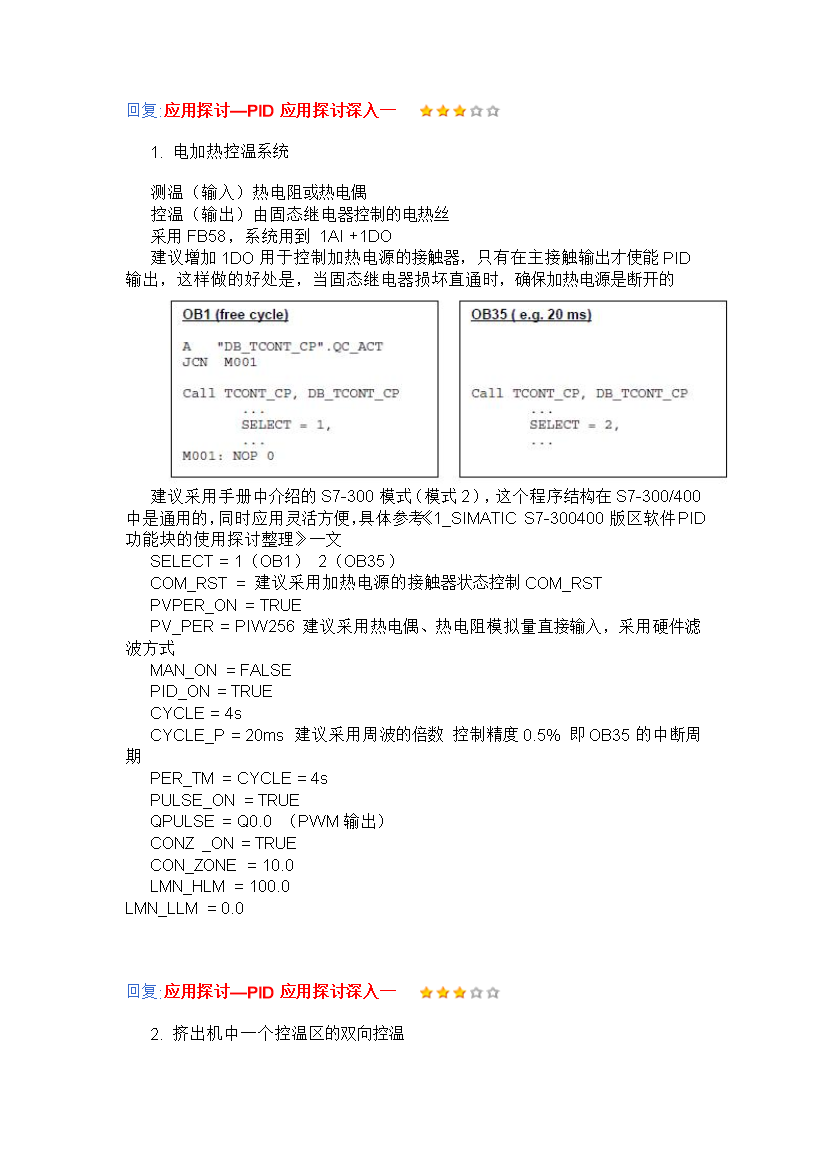
回复:应用探讨—PID应用探讨深入一1.电加热控温系统测温(输入)热电阻或热电偶控温(输出)由固态继电器控制的电热丝采用FB58,系统用到1AI+1DO建议增加1DO用于控制加热电源的接触器,只有在主接触输出才使能PID输出,这样做的好处是,当固态继电器损坏直通时,确保加热电源是断开的建议采用手册中介绍的S7-300模式(模式2),这个程序结构在S7-300/400中是通用的,同时应用灵活方便,具体参考《1_SIMATICS7-300400版区软件PID功能块的使用探讨整理》一文SELECT=1(OB1)

PID温度控制.doc
#include<stdio.h>#include<math.h>struct_pid{intpv;/*数据赋值*/intsp;/*数据设置*/floatintegral;floatpgain;floatigain;floatdgain;intdeadband;intlast_error;};struct_pidwarm,*pid;intprocess_point,set_point,dead_band;floatp_gain,i_gain,d_gain,integral_val,new_integ;;/
温度pid控制0.docx
回复:应用探讨—PID应用探讨深入一1.电加热控温系统测温(输入)热电阻或热电偶控温(输出)由固态继电器控制的电热丝采用FB58,系统用到1AI+1DO建议增加1DO用于控制加热电源的接触器,只有在主接触输出才使能PID输出,这样做的好处是,当固态继电器损坏直通时,确保加热电源是断开的建议采用手册中介绍的S7-300模式(模式2),这个程序结构在S7-300/400中是通用的,同时应用灵活方便,具体参考《1_SIMATICS7-300400版区软件PID功能块的使用探讨整理》一文SELECT=1(OB1)

电炉的温度PID控制.doc
电炉的温度控制实验目的学习利用PID指令编写程序。实验设备西门子S7-200PLC一台,EM231模拟量输入模块一个,EM232模拟输出模块一个,0-5V直流稳压电源一台,RS232数据线。实验功能有一台电炉要求炉温控制在一定得范围。电炉的工作原理如下:当设定电炉温度后,S7-200PLC经过PID运算后由模拟量输出模块EM232输出一个电压信号送到控制板,控制板根据电压信号(弱点信号)的大小控制电热丝加热电压(强电信号)的大小(甚至断开),温度传感器测量电炉的温度,温度信号经过控制板的处理后输入到模拟量
PID温度控制实验.pdf
PID温度控制实验PID(ProportionalIntegralDerivative)控制是最早发展起来的控制策略之一,它根据系统的误差,利用比例、积分、微分计算出控制量对系统进行控制。当我们不彻底了解一个系统和被控对象,或者不能通过有效的测量手段来获得系统参数时,最适合用PID控制技术。由于其算法简单、鲁棒性好和可靠性高,被广泛应用于工业过程控制。PID调节控制是一个传统控制方法,它合用于温度、压力、流量、液位等几乎所有现场,不同的现场,仅仅是PID参数应设置不同,只要参数设置得当均可以达到很好的效果