
车路协同环境下的交通态势感知及决策引导系统.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

车路协同环境下的交通态势感知及决策引导系统.docx
车路协同环境下的交通态势感知及决策引导系统车路协同环境下的交通态势感知及决策引导系统摘要:随着城市交通不断发展,交通拥堵、事故频发等问题也随之增加。为了解决这些问题,车路协同系统应运而生。车路协同系统通过车辆与道路基础设施之间的有效交互,实现了交通态势感知及决策引导的功能。本文主要介绍车路协同环境下的交通态势感知及决策引导系统的工作原理与技术,并对其应用前景进行探讨。关键词:车路协同,交通态势感知,决策引导,系统,技术一、引言随着全球经济的快速发展以及城市化进程的加速推进,城市交通问题日益凸显。交通拥堵、

车路协同系统路侧感知与车端感知实时匹配的方法及系统.pdf
本发明涉及一种车路协同系统路侧感知与车端感知实时匹配方法,该方法包括以下步骤:步骤1:通过路端传感器采集道路原始数据并传输至路端计算单元;步骤2:路端计算单元处理道路原始数据并得到路端感知融合数据后传输至路端RSU;步骤3:路端RSU将路端感知融合数据转换为标准感知共享数据后进行广播;步骤4:车端OBU接收路端RSU广播的标准感知共享数据,并将其转换为路端感知融合数据传输至车端计算单元;步骤5:车端计算单元同时接收车端的传感器原始数据和路端感知融合数据后进行实时目标匹配,与现有技术相比,本发明具有能够实时
车路云协同感知的方法和系统.pdf
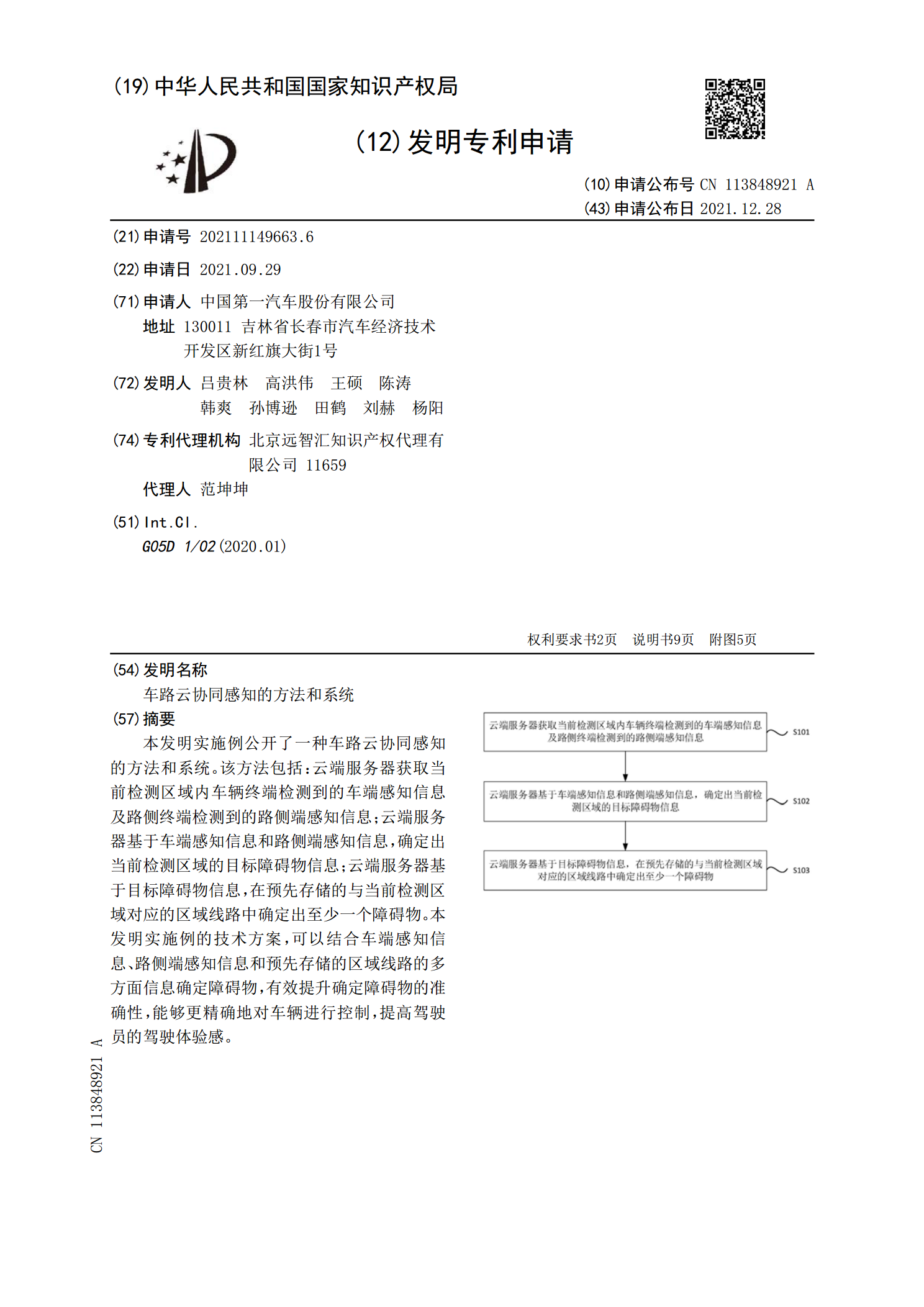
本发明实施例公开了一种车路云协同感知的方法和系统。该方法包括:云端服务器获取当前检测区域内车辆终端检测到的车端感知信息及路侧终端检测到的路侧端感知信息;云端服务器基于车端感知信息和路侧端感知信息,确定出当前检测区域的目标障碍物信息;云端服务器基于目标障碍物信息,在预先存储的与当前检测区域对应的区域线路中确定出至少一个障碍物。本发明实施例的技术方案,可以结合车端感知信息、路侧端感知信息和预先存储的区域线路的多方面信息确定障碍物,有效提升确定障碍物的准确性,能够更精确地对车辆进行控制,提高驾驶员的驾驶体验感。
基于车路协同的无人驾驶车辆紧急避险感知与决策系统.pdf
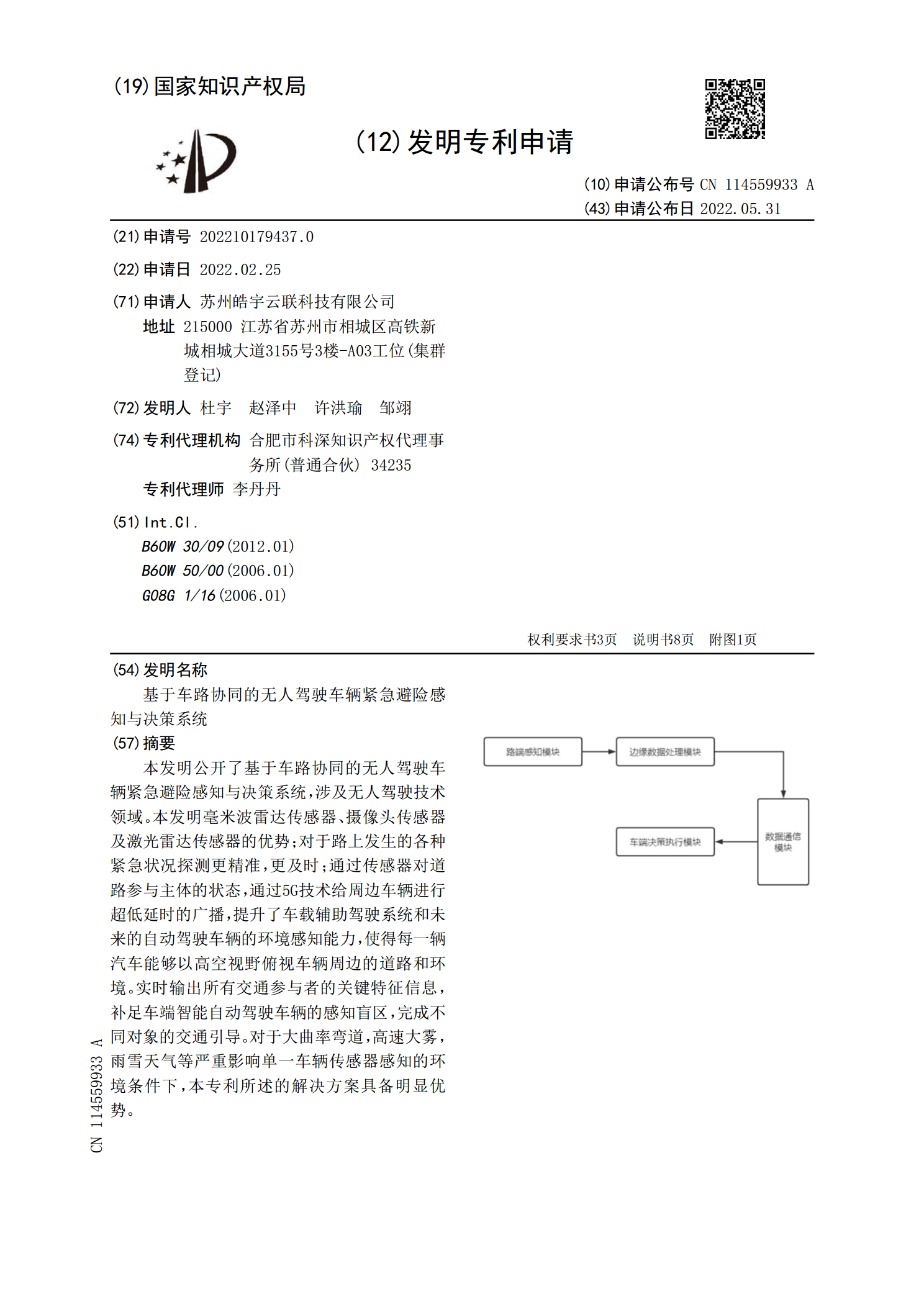
本发明公开了基于车路协同的无人驾驶车辆紧急避险感知与决策系统,涉及无人驾驶技术领域。本发明毫米波雷达传感器、摄像头传感器及激光雷达传感器的优势;对于路上发生的各种紧急状况探测更精准,更及时;通过传感器对道路参与主体的状态,通过5G技术给周边车辆进行超低延时的广播,提升了车载辅助驾驶系统和未来的自动驾驶车辆的环境感知能力,使得每一辆汽车能够以高空视野俯视车辆周边的道路和环境。实时输出所有交通参与者的关键特征信息,补足车端智能自动驾驶车辆的感知盲区,完成不同对象的交通引导。对于大曲率弯道,高速大雾,雨雪天气等

车路协同环境下的交通控制与诱导协同研究的任务书.docx
车路协同环境下的交通控制与诱导协同研究的任务书一、任务背景随着城市化进程的加速,城市交通拥堵问题日益凸显。特别是在高峰期,交通流量剧增,出行效率极低,不仅对市民的出行造成极大的不便,同时也严重影响城市的经济社会发展,对能源的消耗也形成了较大的负担。为了解决城市交通拥堵问题,发展智能交通系统已经成为一种重要的趋势。智能交通系统通过信息技术手段实现路网、车辆和人员之间的信息互通,提高交通互联互通,进而实现智能化交通控制。车路协同是智能交通系统中的一个重要概念,它是指车辆和路网之间的交互,使车辆得到准确的道路信