
绳驱单关节柔性手指的优化设计.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

绳驱单关节柔性手指的优化设计.docx
绳驱单关节柔性手指的优化设计标题:基于绳驱单关节柔性手指的优化设计摘要:随着机器人技术的快速发展,柔性手指作为机器人的重要组成部分,正逐渐受到广泛关注。本文针对绳驱动单关节柔性手指进行了优化设计,从材料选择、结构设计、运动控制等方面进行了综合研究。通过实验验证,优化设计的绳驱单关节柔性手指具有较好的运动灵活性和载荷能力,能够满足复杂的工作环境需求。1.引言2.绳驱单关节柔性手指的发展历程3.材料选择3.1弹性材料的选择3.2牵引绳的选择4.结构设计4.1关节设计4.2手指表面设计5.运动控制5.1传感器选

一种绳驱多关节柔性机械臂测量实验平台.pdf
本发明公开了一种绳驱多关节柔性机械臂测量实验平台,包括支撑架、操作箱、标定板和姿态传感器;支撑架上设有操作箱和标定板;操作箱包括正面板、侧面板、连接杆、滑轮、刻度尺和砝码;正面板与机械臂之间为可选择安装角度的连接,正面板在围绕机械臂的周侧外设有一圈指示角度的刻度;两侧面板上均设有多个供连接杆选择安装的杆孔;多个滑轮和刻度尺均分别安装于多根连接杆上;操作箱用于供机械臂的绳索绕过滑轮连接砝码;标定板设于操作箱的一侧,标定板用于供机械臂进行投影测量;姿态传感器用于安装在机械臂上,以获取机械臂的姿态信息;采用此方
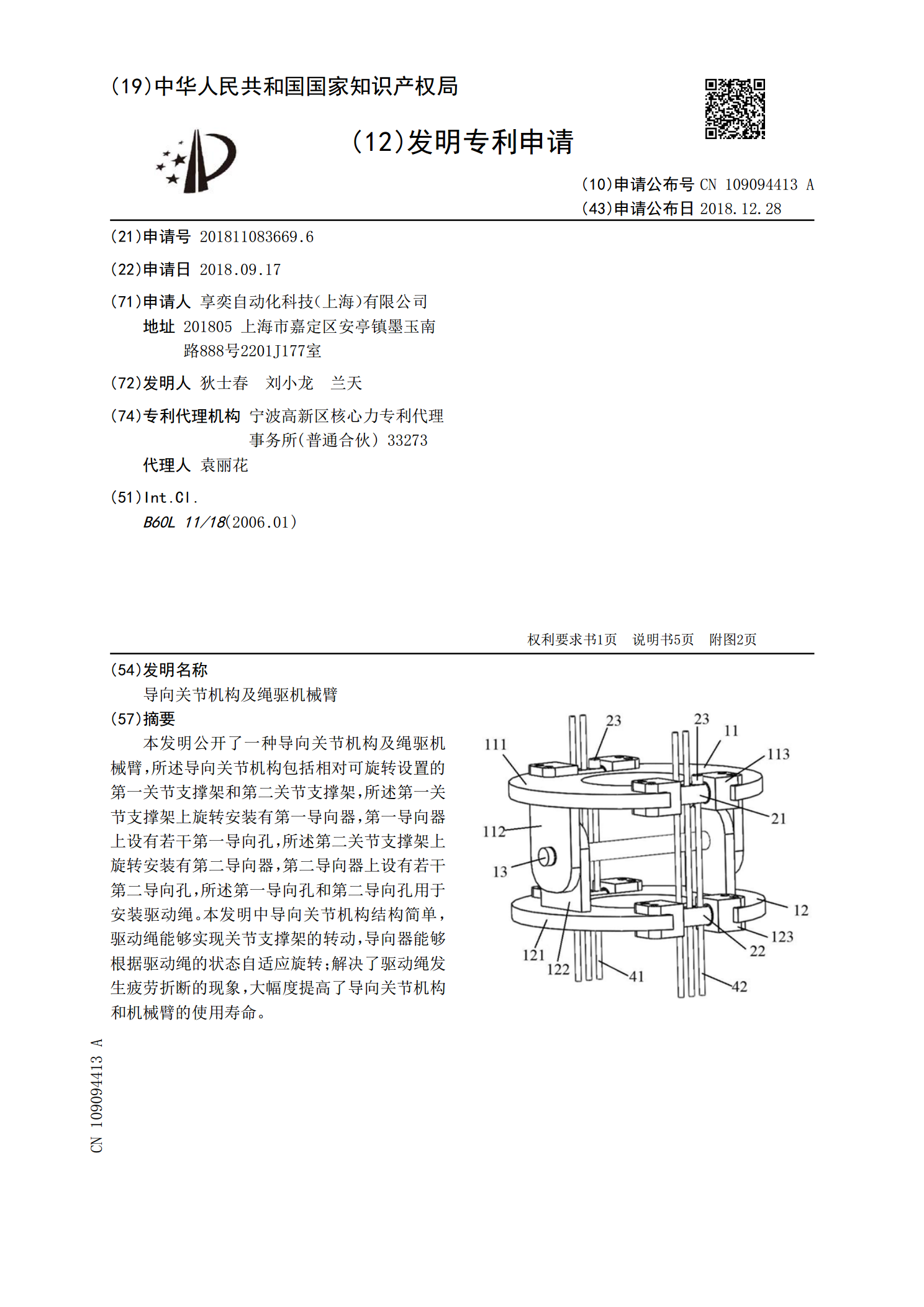
导向关节机构及绳驱机械臂.pdf
本发明公开了一种导向关节机构及绳驱机械臂,所述导向关节机构包括相对可旋转设置的第一关节支撑架和第二关节支撑架,所述第一关节支撑架上旋转安装有第一导向器,第一导向器上设有若干第一导向孔,所述第二关节支撑架上旋转安装有第二导向器,第二导向器上设有若干第二导向孔,所述第一导向孔和第二导向孔用于安装驱动绳。本发明中导向关节机构结构简单,驱动绳能够实现关节支撑架的转动,导向器能够根据驱动绳的状态自适应旋转;解决了驱动绳发生疲劳折断的现象,大幅度提高了导向关节机构和机械臂的使用寿命。

基于柔绳传动的外骨骼柔性关节驱动装置.pdf
本发明公开了一种基于柔绳传动的外骨骼柔性关节驱动装置,它包括机架、电机、关节、绕线装置和柔绳,关节的箱体和绕线装置分别与机架固定连接,电机通过联轴器与绕线装置连接;柔绳缠绕在绕线装置上,并且在由绕线装置引出后,柔绳的两端分别与关节的固定轮固定连接。本发明在精确实现传动的同时,较大程度地减轻了外骨骼康复治疗装置的重量,减轻患者的负担。
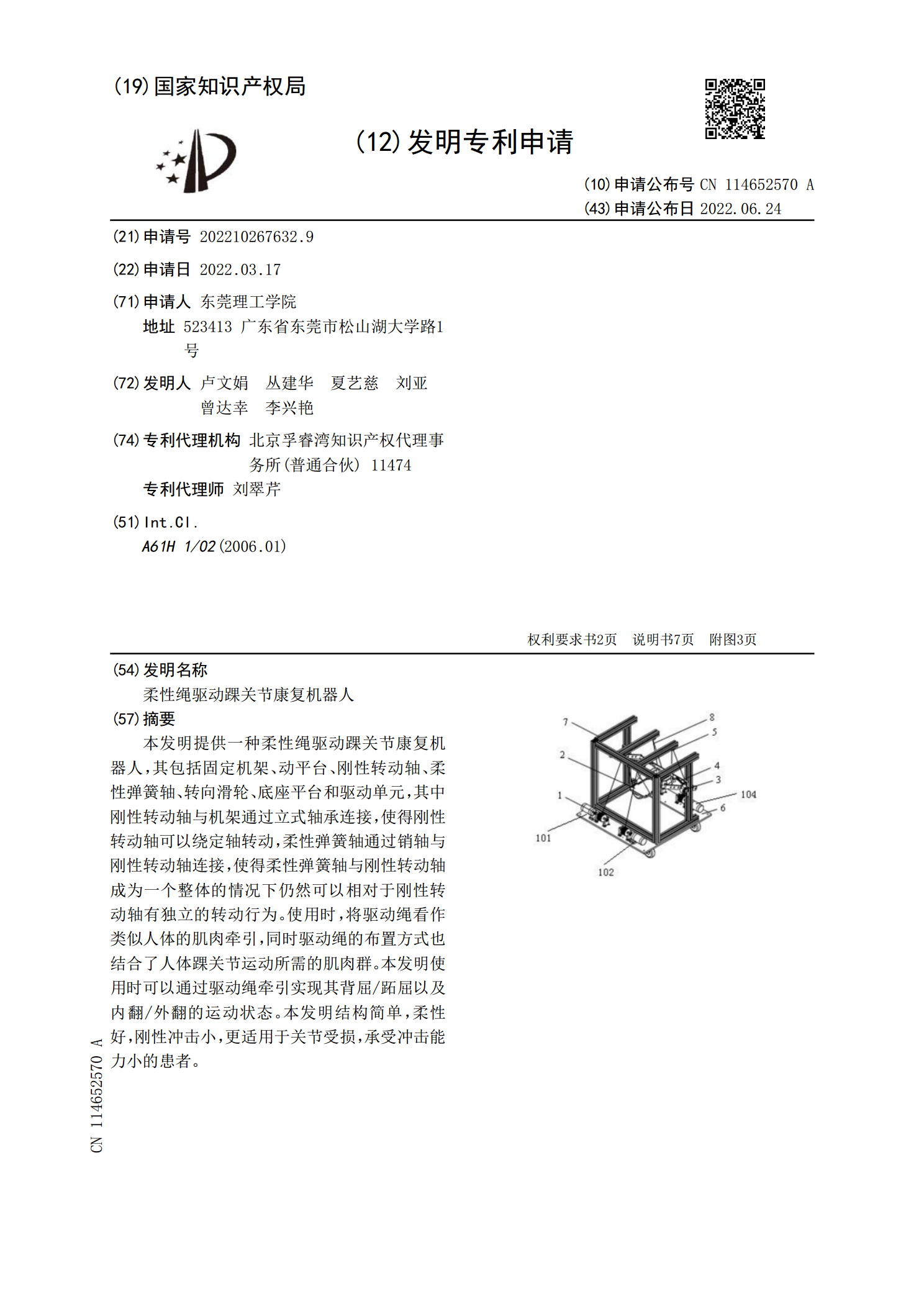
柔性绳驱动踝关节康复机器人.pdf
本发明提供一种柔性绳驱动踝关节康复机器人,其包括固定机架、动平台、刚性转动轴、柔性弹簧轴、转向滑轮、底座平台和驱动单元,其中刚性转动轴与机架通过立式轴承连接,使得刚性转动轴可以绕定轴转动,柔性弹簧轴通过销轴与刚性转动轴连接,使得柔性弹簧轴与刚性转动轴成为一个整体的情况下仍然可以相对于刚性转动轴有独立的转动行为。使用时,将驱动绳看作类似人体的肌肉牵引,同时驱动绳的布置方式也结合了人体踝关节运动所需的肌肉群。本发明使用时可以通过驱动绳牵引实现其背屈/跖屈以及内翻/外翻的运动状态。本发明结构简单,柔性好,刚性冲