
导向关节机构及绳驱机械臂.pdf

一吃****新冬


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
导向关节机构及绳驱机械臂.pdf
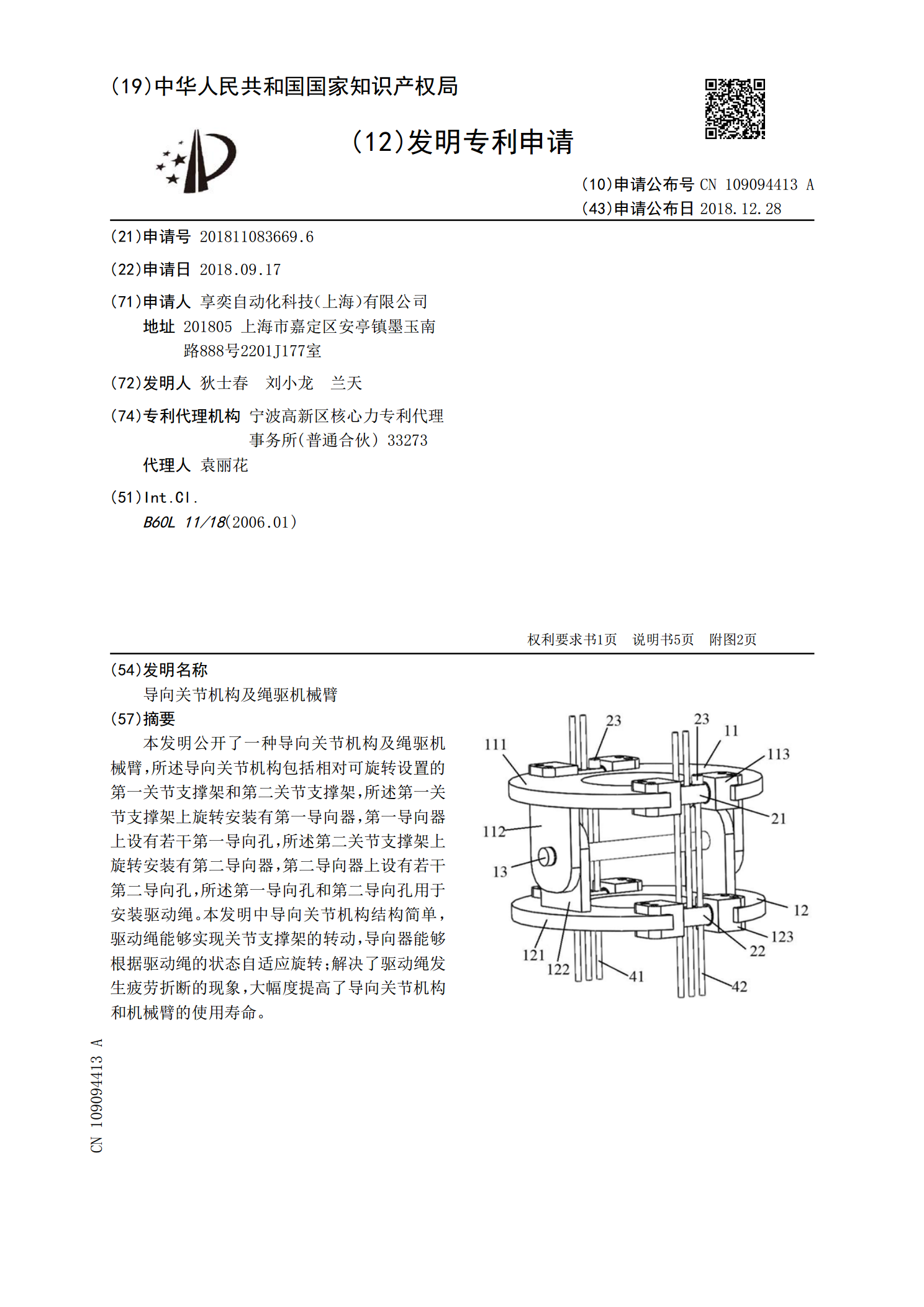
本发明公开了一种导向关节机构及绳驱机械臂,所述导向关节机构包括相对可旋转设置的第一关节支撑架和第二关节支撑架,所述第一关节支撑架上旋转安装有第一导向器,第一导向器上设有若干第一导向孔,所述第二关节支撑架上旋转安装有第二导向器,第二导向器上设有若干第二导向孔,所述第一导向孔和第二导向孔用于安装驱动绳。本发明中导向关节机构结构简单,驱动绳能够实现关节支撑架的转动,导向器能够根据驱动绳的状态自适应旋转;解决了驱动绳发生疲劳折断的现象,大幅度提高了导向关节机构和机械臂的使用寿命。

一种绳驱多关节柔性机械臂测量实验平台.pdf
本发明公开了一种绳驱多关节柔性机械臂测量实验平台,包括支撑架、操作箱、标定板和姿态传感器;支撑架上设有操作箱和标定板;操作箱包括正面板、侧面板、连接杆、滑轮、刻度尺和砝码;正面板与机械臂之间为可选择安装角度的连接,正面板在围绕机械臂的周侧外设有一圈指示角度的刻度;两侧面板上均设有多个供连接杆选择安装的杆孔;多个滑轮和刻度尺均分别安装于多根连接杆上;操作箱用于供机械臂的绳索绕过滑轮连接砝码;标定板设于操作箱的一侧,标定板用于供机械臂进行投影测量;姿态传感器用于安装在机械臂上,以获取机械臂的姿态信息;采用此方

串联式绳驱机械手关节运动的被动解耦机构.pdf
本发明公开了串联式绳驱机械手关节运动的被动解耦机构,为克服串联式绳驱机械手关节运动耦合的问题,被动解耦机构包括基座系统、解耦模块、1号手臂系统、2号手臂、1号驱动绳与2号驱动绳;1号手臂系统通过其中的1号主动轮的小轴段的下端安装在基座系统中的基座板右端的光通孔中为间隙配合;1号手臂系统的1号手臂板左端的3号齿轮和基座系统中的5号齿轮啮合连接;2号手臂左端采过盈配合的方式套装在1号手臂系统中的9号销钉的上端;解耦模块安装在基座板上的矩形凹槽内,解耦模块中的齿条与基座系统中的2号齿轮啮合连接;1号驱动绳套装在
串联式绳驱机械手关节运动的被动解耦机构.pdf
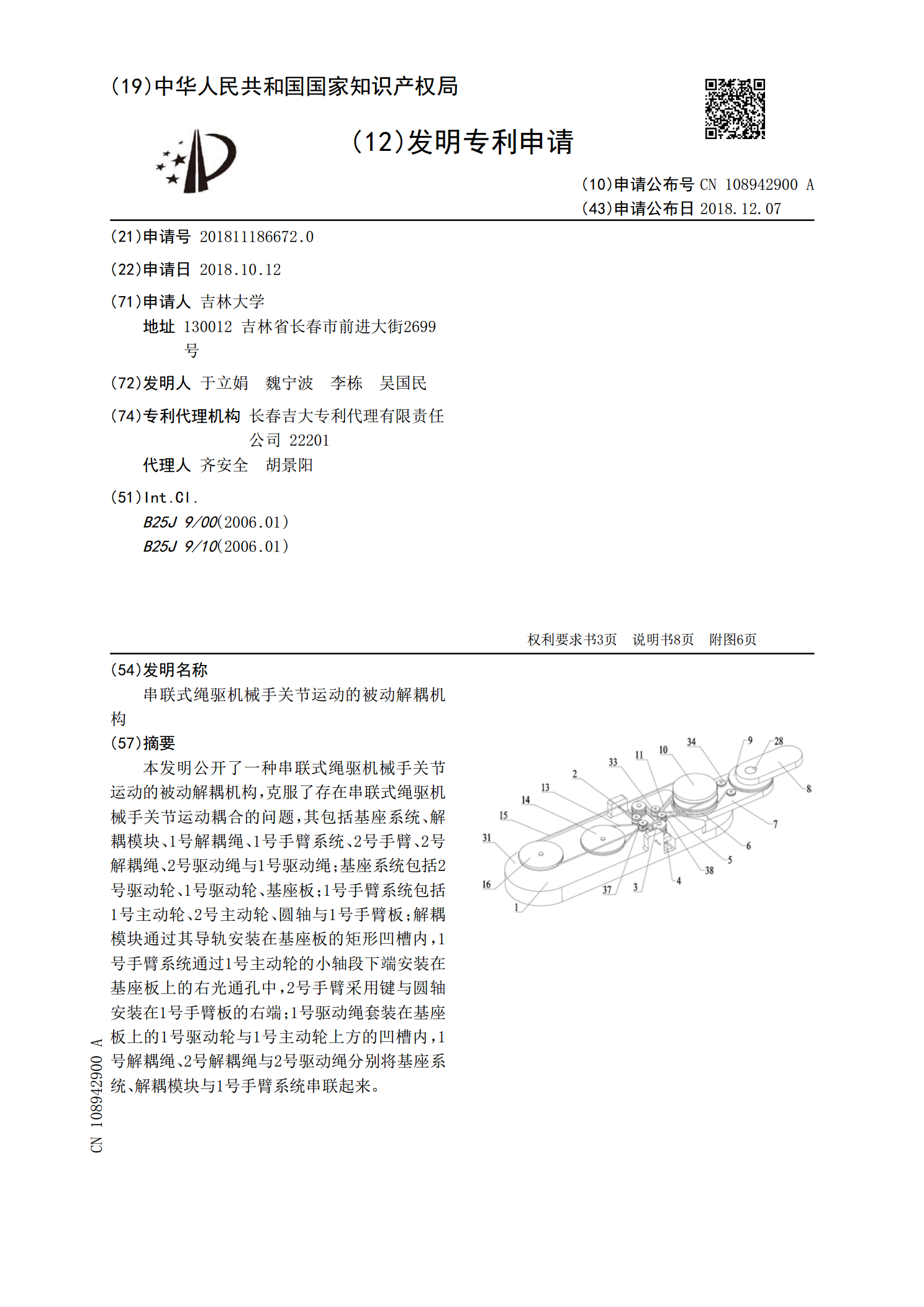
本发明公开了一种串联式绳驱机械手关节运动的被动解耦机构,克服了存在串联式绳驱机械手关节运动耦合的问题,其包括基座系统、解耦模块、1号解耦绳、1号手臂系统、2号手臂、2号解耦绳、2号驱动绳与1号驱动绳;基座系统包括2号驱动轮、1号驱动轮、基座板;1号手臂系统包括1号主动轮、2号主动轮、圆轴与1号手臂板;解耦模块通过其导轨安装在基座板的矩形凹槽内,1号手臂系统通过1号主动轮的小轴段下端安装在基座板上的右光通孔中,2号手臂采用键与圆轴安装在1号手臂板的右端;1号驱动绳套装在基座板上的1号驱动轮与1号主动轮上方的
一种绳驱机械臂的绕线方式.pdf
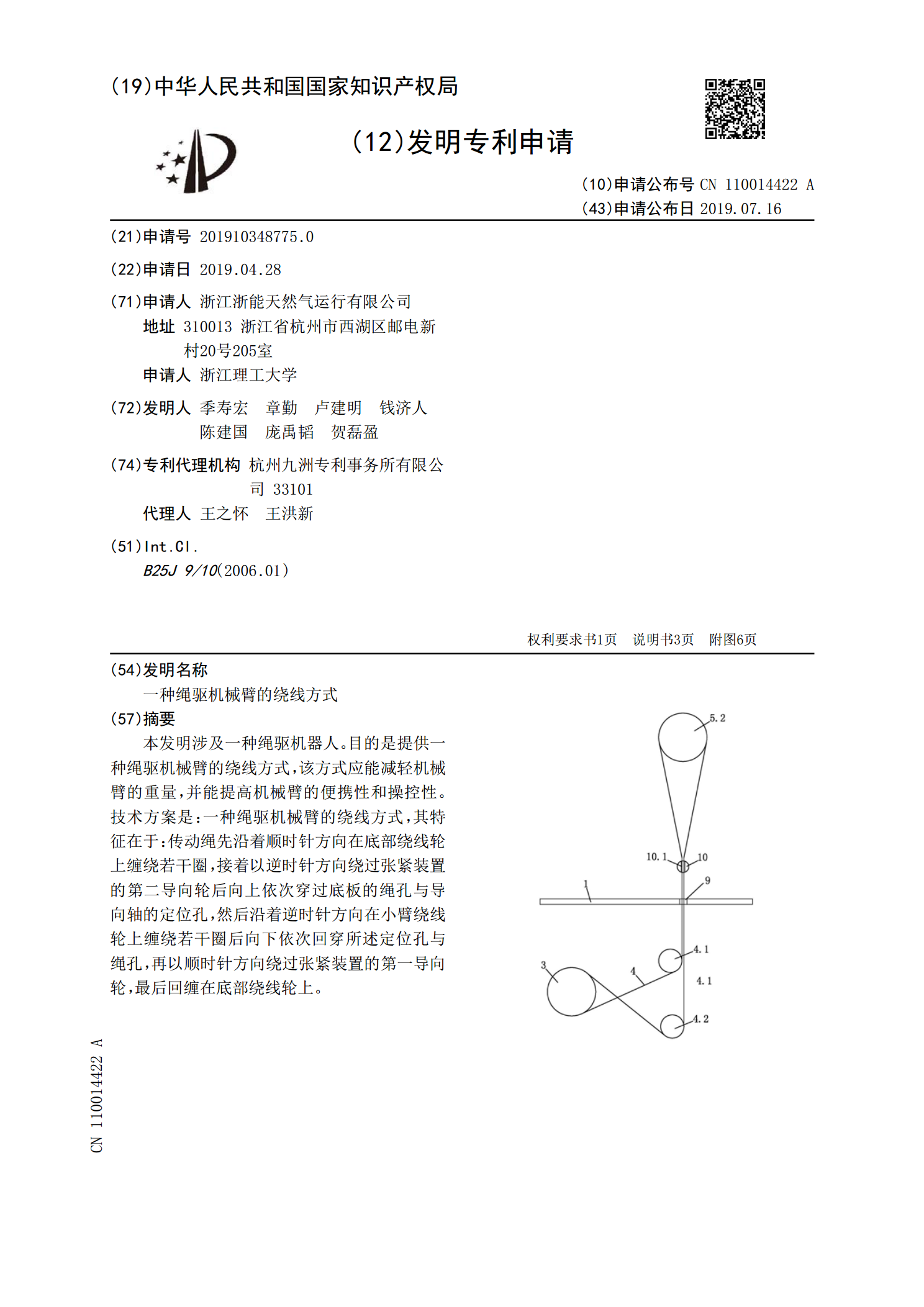
本发明涉及一种绳驱机器人。目的是提供一种绳驱机械臂的绕线方式,该方式应能减轻机械臂的重量,并能提高机械臂的便携性和操控性。技术方案是:一种绳驱机械臂的绕线方式,其特征在于:传动绳先沿着顺时针方向在底部绕线轮上缠绕若干圈,接着以逆时针方向绕过张紧装置的第二导向轮后向上依次穿过底板的绳孔与导向轴的定位孔,然后沿着逆时针方向在小臂绕线轮上缠绕若干圈后向下依次回穿所述定位孔与绳孔,再以顺时针方向绕过张紧装置的第一导向轮,最后回缠在底部绕线轮上。