
基于无模型自适应的外骨骼式上肢康复机器人主动交互训练控制方法.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于无模型自适应的外骨骼式上肢康复机器人主动交互训练控制方法.docx
基于无模型自适应的外骨骼式上肢康复机器人主动交互训练控制方法摘要:上肢康复机器人是近年来发展的热点领域,可以帮助患者进行康复训练并恢复肌肉功能。然而,上肢康复机器人需要配备适当的控制算法以保证其正确、高效地进行治疗。本文提出了一种基于无模型自适应的外骨骼式上肢康复机器人主动交互训练控制方法,该方法可以自动适应患者肢体的运动,并紧密结合机器人控制系统和人机交互界面,实现了主动交互训练并有效地促进了患者的康复治疗。关键词:无模型自适应,外骨骼式,上肢康复,交互训练,控制方法一、引言随着人口老龄化的不断加剧,各
外骨骼式上肢康复机器人.pdf
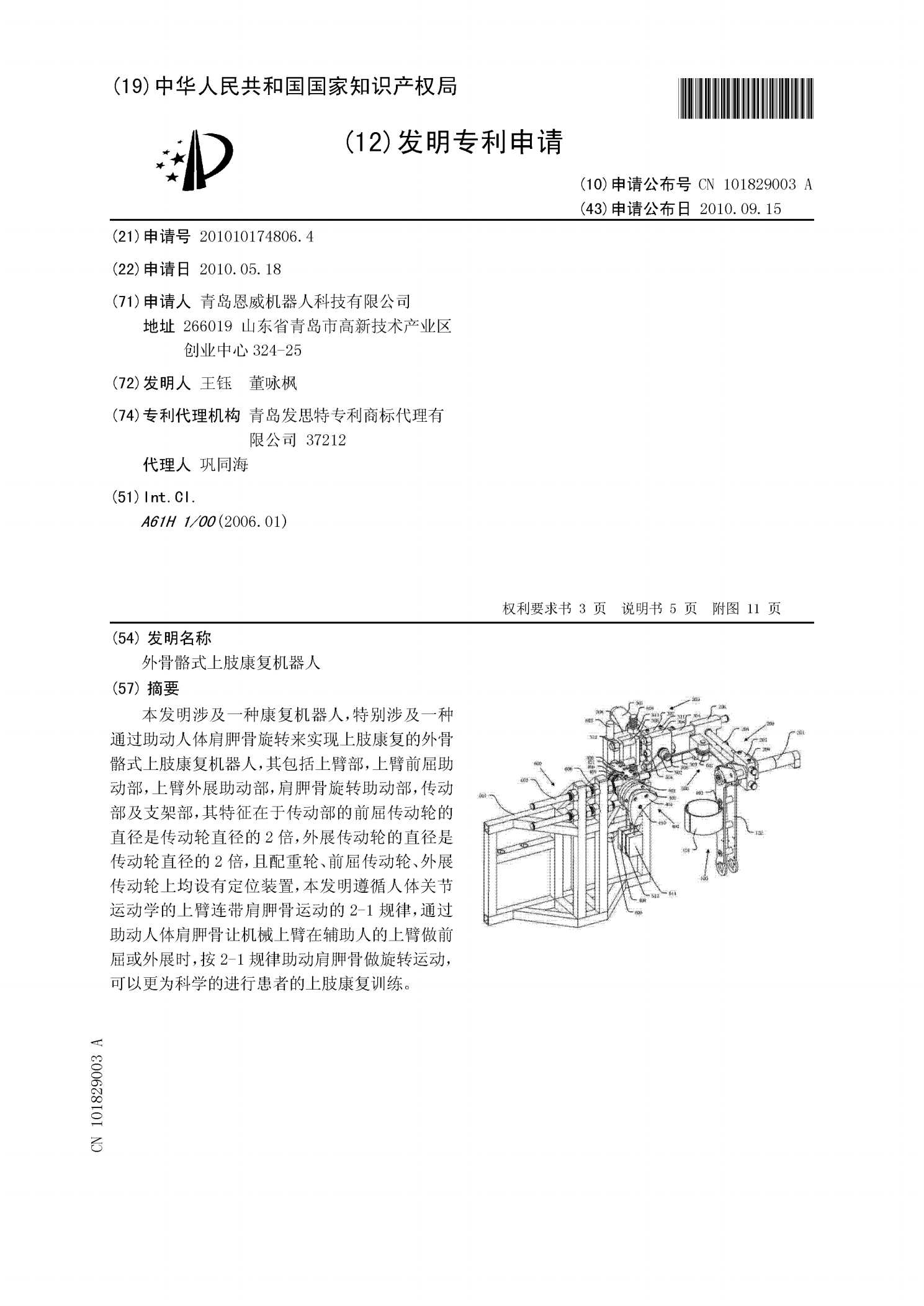
本发明涉及一种康复机器人,特别涉及一种通过助动人体肩胛骨旋转来实现上肢康复的外骨骼式上肢康复机器人,其包括上臂部,上臂前屈助动部,上臂外展助动部,肩胛骨旋转助动部,传动部及支架部,其特征在于传动部的前屈传动轮的直径是传动轮直径的2倍,外展传动轮的直径是传动轮直径的2倍,且配重轮、前屈传动轮、外展传动轮上均设有定位装置,本发明遵循人体关节运动学的上臂连带肩胛骨运动的2-1规律,通过助动人体肩胛骨让机械上臂在辅助人的上臂做前屈或外展时,按2-1规律助动肩胛骨做旋转运动,可以更为科学的进行患者的上肢康复训练。?

上肢康复机器人主动交互虚拟训练系统的开发.docx
上肢康复机器人主动交互虚拟训练系统的开发标题:上肢康复机器人主动交互虚拟训练系统的开发摘要:随着人口老龄化问题的日益突出,上肢康复机器人逐渐成为促进康复治疗的重要工具。然而,传统的机器人康复训练系统存在缺乏主动交互和个性化训练特点的问题。本文主要介绍了一种基于主动交互的虚拟训练系统,该系统能够提供个性化的训练方案,增加患者的参与度和康复效果。通过系统开发和实验验证,结果表明,该系统在提升康复训练效果方面具有显著的优势。1.引言上肢康复机器人在降低医疗人力成本、提高康复效果等方面具有巨大潜力。然而,当前市场

上肢康复外骨骼机器人控制方法进展研究.pptx
上肢康复外骨骼机器人控制方法进展研究目录添加目录项标题上肢康复外骨骼机器人概述定义与功能分类与特点应用领域上肢康复外骨骼机器人控制方法研究现状神经网络控制方法模糊逻辑控制方法滑模控制方法鲁棒控制方法上肢康复外骨骼机器人控制方法研究进展新型控制算法研究控制精度与稳定性提升研究人机交互与协同控制研究智能化与自适应控制研究上肢康复外骨骼机器人控制方法面临的挑战与展望挑战分析未来发展方向技术创新与应用前景结论研究成果总结对未来研究的建议与展望感谢观看

运动自适应上肢康复训练外骨骼机器人系统设计方法和应用试验研究.docx
运动自适应上肢康复训练外骨骼机器人系统设计方法和应用试验研究运动自适应上肢康复训练外骨骼机器人系统设计方法和应用试验研究摘要:随着人口老龄化的加剧,上肢康复训练需求逐渐增加。为了提高康复训练效果和减轻医护人员的负担,外骨骼机器人系统成为一种重要的康复训练辅助设备。本文主要介绍了运动自适应上肢康复训练外骨骼机器人系统的设计方法和应用试验研究,以帮助促进康复治疗技术的发展。1.引言随着人口老龄化的加快和生活方式的改变,上肢功能障碍的发生率逐渐增加。上肢功能障碍会严重影响患者的生活质量,因此上肢康复训练变得愈发