
基于SLAM的智能避障机器人.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于SLAM的智能避障机器人.docx
基于SLAM的智能避障机器人基于SLAM的智能避障机器人摘要:智能机器人是现代科技发展的重要产物之一,而其中的避障功能对于机器人的应用范围以及安全性能起着至关重要的作用。同时,基于SLAM(SimultaneousLocalizationandMapping)技术的智能避障机器人系统可以通过实时定位和环境地图的构建来实现自主路径规划和障碍物避让。本文通过对SLAM技术的研究和分析,介绍了智能避障机器人的工作原理和实现方法,并探讨了其在实际应用中的优势和挑战。关键词:智能机器人、避障、SLAM、路径规划1.

基于SLAM技术的智能避障割草机研究.docx
基于SLAM技术的智能避障割草机研究一、研究背景和意义随着科技的不断发展,人工智能。尤其是在家庭生活中,智能设备已经逐渐成为人们生活的一部分。割草机作为家庭园艺的重要工具,其自动化程度的提高将极大地提高人们的生活质量。传统的割草机在操作过程中需要人工干预,无法实现自主导航和避障功能,这给用户带来了一定的不便。研究一种基于SLAM技术的智能避障割草机具有重要的现实意义。SLAM技术是一种实时定位与地图构建的技术,它可以在未知环境中为机器人提供全局的定位信息并构建环境地图。通过将SLAM技术应用于割草机中,可
基于Arduino的智能避障机器人设计.pptx
添加副标题目录PART01PART02Arduino是什么Arduino的特点Arduino的应用领域PART03机器人功能需求分析硬件选型与设计软件编程与实现避障算法原理及应用PART04Arduino对机器人的控制方式传感器数据采集与处理机器人的移动与执行机构调试与优化PART05智能避障机器人在家庭中的应用智能避障机器人在工业自动化生产线上的应用智能避障机器人在服务行业中的应用智能避障机器人在救援领域中的应用PART06智能避障机器人的发展趋势基于Arduino技术的创新应用面临的挑战与机遇感谢您的

基于Dijkstra的智能巡检机器人避障算法.docx
基于Dijkstra的智能巡检机器人避障算法基于Dijkstra的智能巡检机器人避障算法摘要:随着科技的不断发展,智能巡检机器人在工业领域的应用越来越广泛。然而,在实际应用中,机器人的避障能力成为一个重要的问题。本文提出了一种基于Dijkstra算法的智能巡检机器人避障算法,通过构建环境地图和计算最短路径,实现机器人的智能避障。实验结果表明,该算法能够高效准确地规避障碍物,提高机器人的安全性和可靠性。关键词:智能巡检机器人、避障、Dijkstra算法1.引言随着工业生产的发展,智能巡检机器人在生产线巡检、
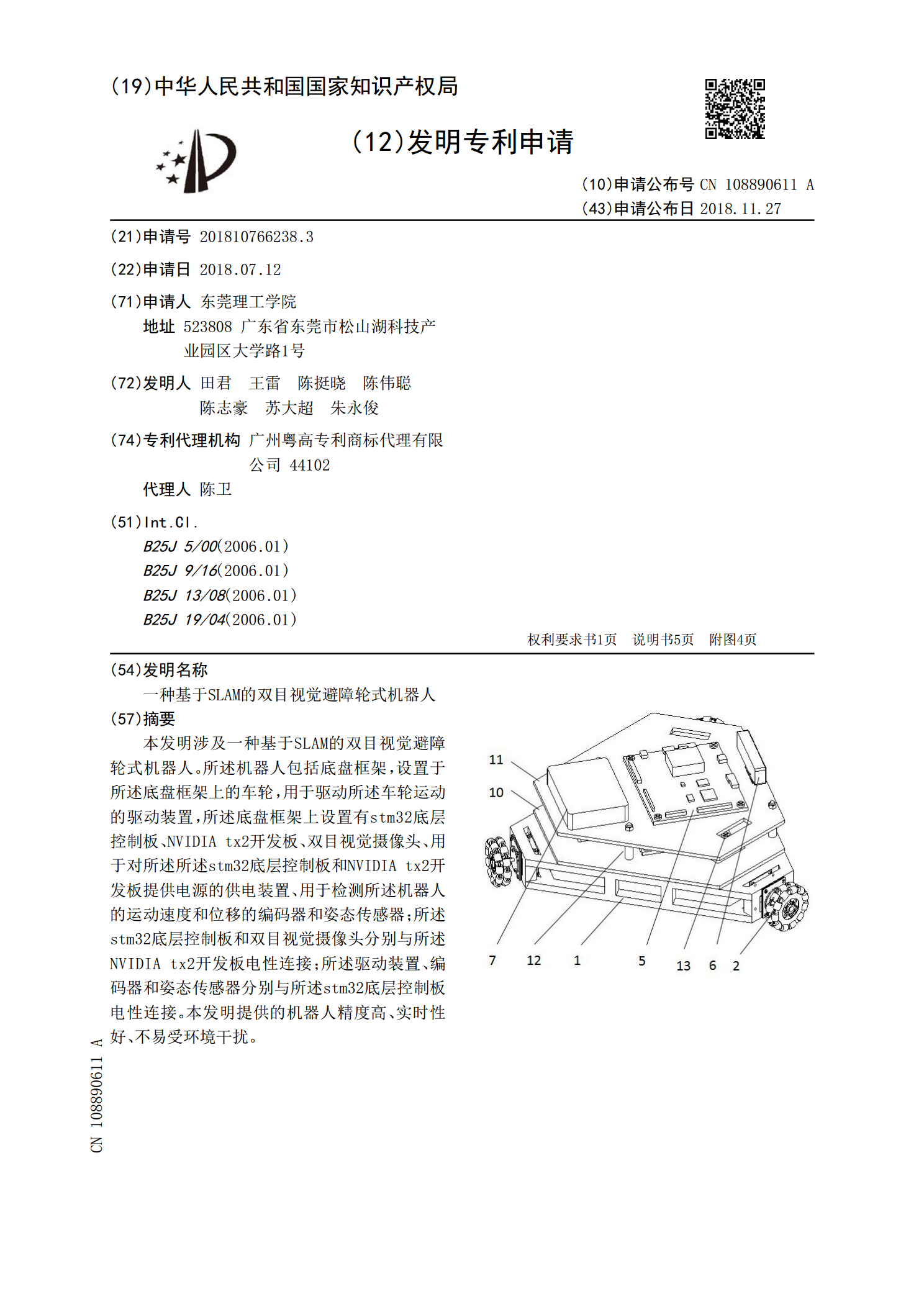
一种基于SLAM的双目视觉避障轮式机器人.pdf
本发明涉及一种基于SLAM的双目视觉避障轮式机器人。所述机器人包括底盘框架,设置于所述底盘框架上的车轮,用于驱动所述车轮运动的驱动装置,所述底盘框架上设置有stm32底层控制板、NVIDIAtx2开发板、双目视觉摄像头、用于对所述所述stm32底层控制板和NVIDIAtx2开发板提供电源的供电装置、用于检测所述机器人的运动速度和位移的编码器和姿态传感器;所述stm32底层控制板和双目视觉摄像头分别与所述NVIDIAtx2开发板电性连接;所述驱动装置、编码器和姿态传感器分别与所述stm32底层控制板电