
基于Dijkstra的智能巡检机器人避障算法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于Dijkstra的智能巡检机器人避障算法.docx
基于Dijkstra的智能巡检机器人避障算法基于Dijkstra的智能巡检机器人避障算法摘要:随着科技的不断发展,智能巡检机器人在工业领域的应用越来越广泛。然而,在实际应用中,机器人的避障能力成为一个重要的问题。本文提出了一种基于Dijkstra算法的智能巡检机器人避障算法,通过构建环境地图和计算最短路径,实现机器人的智能避障。实验结果表明,该算法能够高效准确地规避障碍物,提高机器人的安全性和可靠性。关键词:智能巡检机器人、避障、Dijkstra算法1.引言随着工业生产的发展,智能巡检机器人在生产线巡检、

Dijkstra改进算法在机器人避障问题的应用.docx
Dijkstra改进算法在机器人避障问题的应用Dijkstra改进算法在机器人避障问题的应用摘要:机器人在复杂环境中的移动是一项重要的研究领域,机器人的路径规划与避障是其中的关键问题。本论文介绍了Dijkstra改进算法在机器人避障问题中的应用,该算法能够综合考虑距离和障碍物的因素,实现智能化的路径规划,提高了机器人的移动效率和安全性。关键词:机器人;路径规划;避障;Dijkstra改进算法一、引言机器人技术随着科技的不断发展,已经逐渐被应用到了各行各业中,其中最重要的一点就是机器人的移动问题。机器人在复

基于混合算法的安防巡检机器人避障路径规划.docx
基于混合算法的安防巡检机器人避障路径规划基于混合算法的安防巡检机器人避障路径规划摘要:安防巡检机器人在实际环境中需要能够智能地避开障碍物,规划合适的路径进行巡检任务。本文提出了一种基于混合算法的安防巡检机器人避障路径规划方法。该方法综合了传统的路径规划算法和机器学习算法,提高了机器人的避障能力,并通过实验验证了该方法的有效性。1.引言安防巡检机器人作为一种智能化的巡检设备,能够在安全监控领域发挥重要作用。然而,机器人在不熟悉的环境中面临许多挑战,特别是避障能力。因此,提高机器人的避障能力是十分关键的。2.

基于SLAM的智能避障机器人.docx
基于SLAM的智能避障机器人基于SLAM的智能避障机器人摘要:智能机器人是现代科技发展的重要产物之一,而其中的避障功能对于机器人的应用范围以及安全性能起着至关重要的作用。同时,基于SLAM(SimultaneousLocalizationandMapping)技术的智能避障机器人系统可以通过实时定位和环境地图的构建来实现自主路径规划和障碍物避让。本文通过对SLAM技术的研究和分析,介绍了智能避障机器人的工作原理和实现方法,并探讨了其在实际应用中的优势和挑战。关键词:智能机器人、避障、SLAM、路径规划1.
可避障智能电力网络巡检机器人.pdf
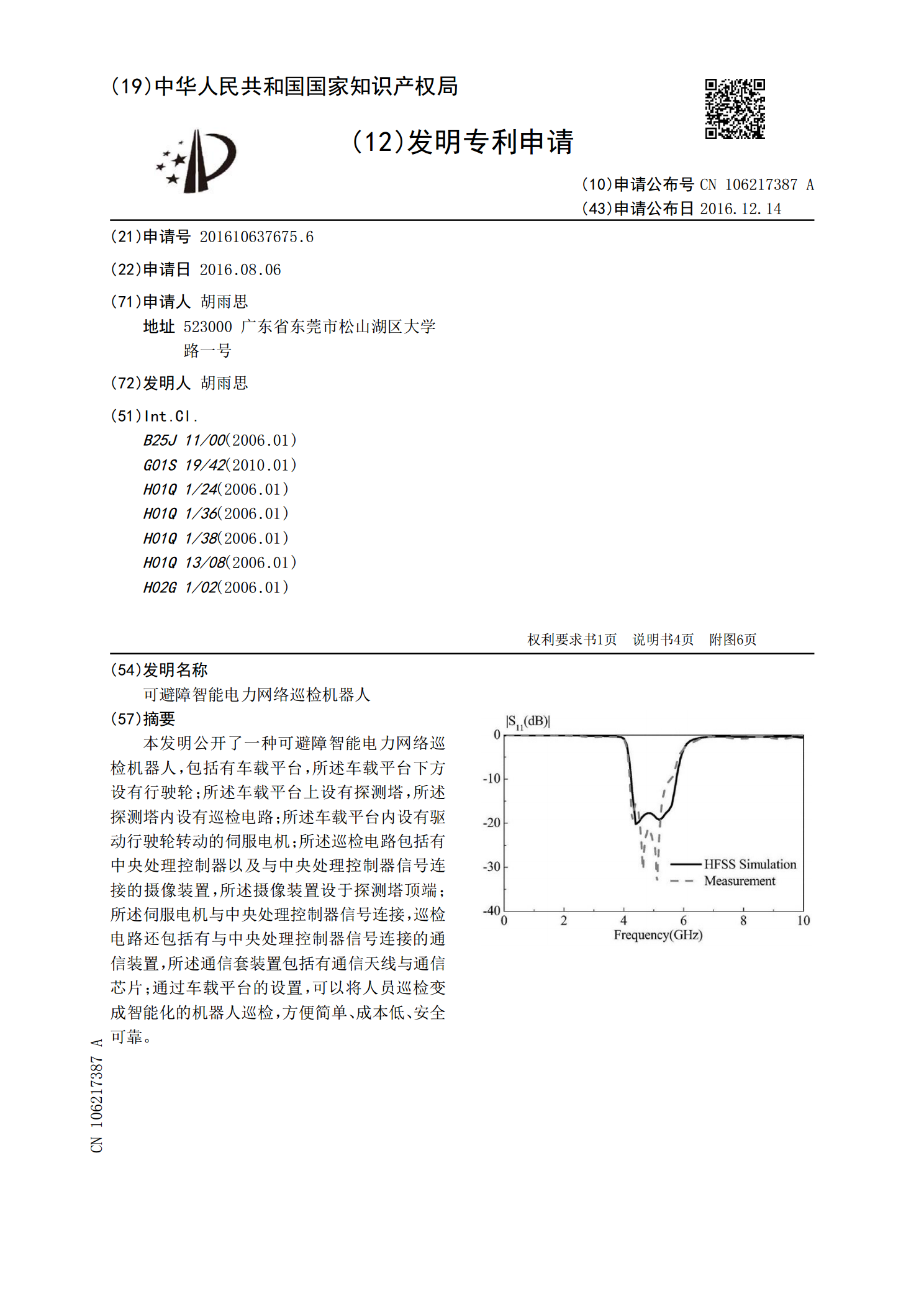
本发明公开了一种可避障智能电力网络巡检机器人,包括有车载平台,所述车载平台下方设有行驶轮;所述车载平台上设有探测塔,所述探测塔内设有巡检电路;所述车载平台内设有驱动行驶轮转动的伺服电机;所述巡检电路包括有中央处理控制器以及与中央处理控制器信号连接的摄像装置,所述摄像装置设于探测塔顶端;所述伺服电机与中央处理控制器信号连接,巡检电路还包括有与中央处理控制器信号连接的通信装置,所述通信套装置包括有通信天线与通信芯片;通过车载平台的设置,可以将人员巡检变成智能化的机器人巡检,方便简单、成本低、安全可靠。