
一种基于SLAM的双目视觉避障轮式机器人.pdf

白凡****12


1/10

2/10
3/10
4/10

5/10
6/10

7/10

8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于SLAM的双目视觉避障轮式机器人.pdf
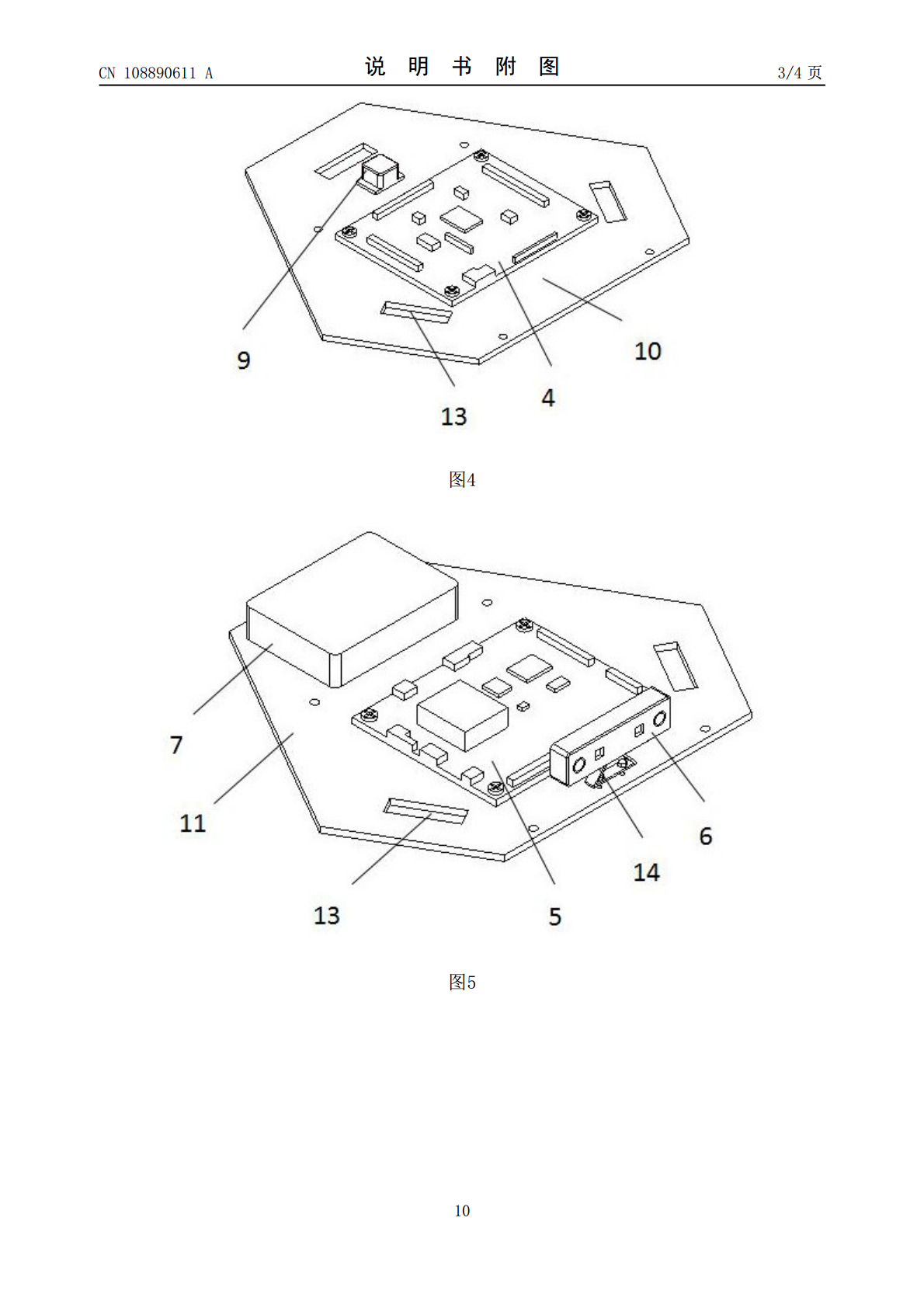
本发明涉及一种基于SLAM的双目视觉避障轮式机器人。所述机器人包括底盘框架,设置于所述底盘框架上的车轮,用于驱动所述车轮运动的驱动装置,所述底盘框架上设置有stm32底层控制板、NVIDIAtx2开发板、双目视觉摄像头、用于对所述所述stm32底层控制板和NVIDIAtx2开发板提供电源的供电装置、用于检测所述机器人的运动速度和位移的编码器和姿态传感器;所述stm32底层控制板和双目视觉摄像头分别与所述NVIDIAtx2开发板电性连接;所述驱动装置、编码器和姿态传感器分别与所述stm32底层控制板电

基于SLAM的智能避障机器人.docx
基于SLAM的智能避障机器人基于SLAM的智能避障机器人摘要:智能机器人是现代科技发展的重要产物之一,而其中的避障功能对于机器人的应用范围以及安全性能起着至关重要的作用。同时,基于SLAM(SimultaneousLocalizationandMapping)技术的智能避障机器人系统可以通过实时定位和环境地图的构建来实现自主路径规划和障碍物避让。本文通过对SLAM技术的研究和分析,介绍了智能避障机器人的工作原理和实现方法,并探讨了其在实际应用中的优势和挑战。关键词:智能机器人、避障、SLAM、路径规划1.
基于双目视觉的避障技术方法.pdf
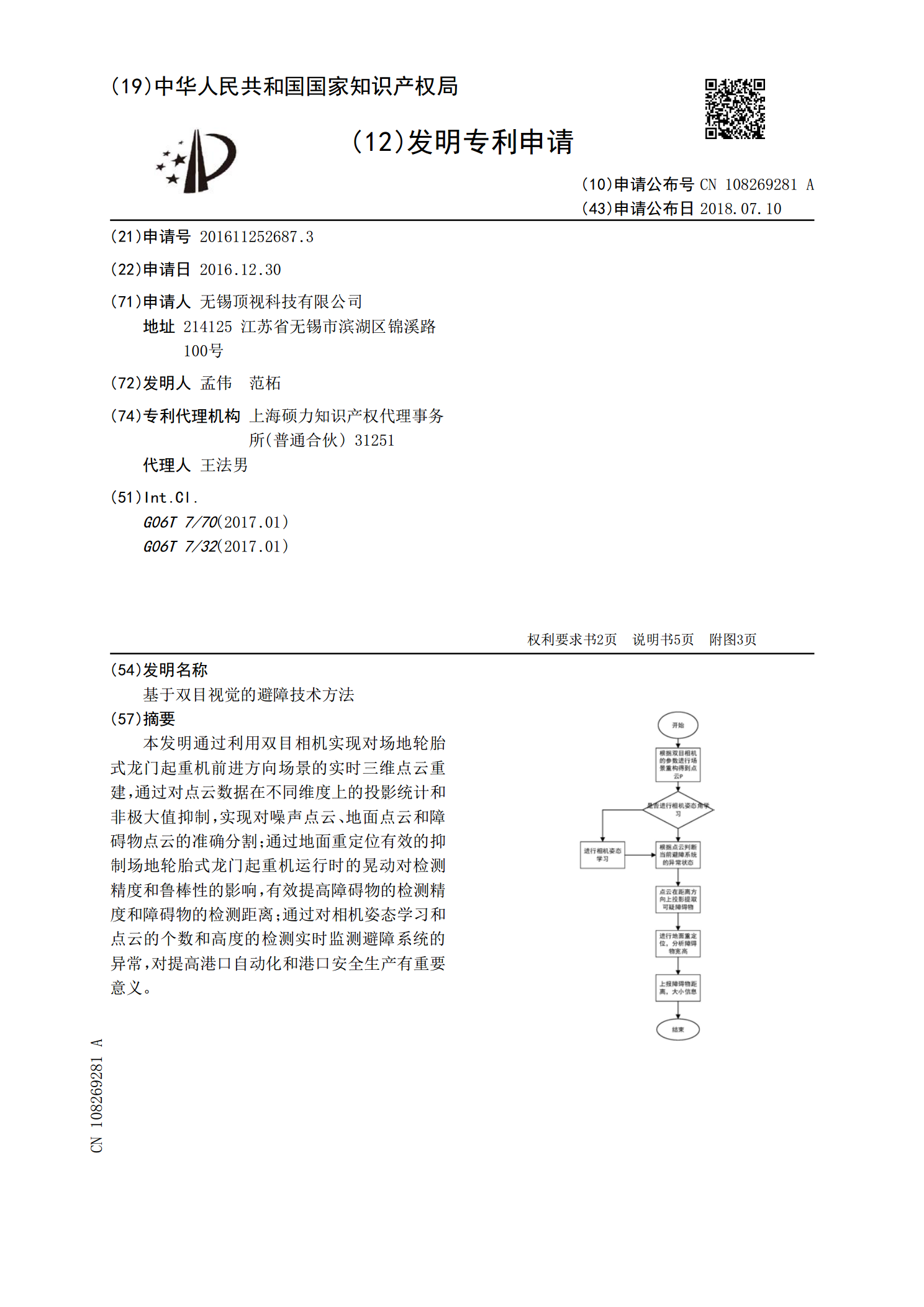
本发明通过利用双目相机实现对场地轮胎式龙门起重机前进方向场景的实时三维点云重建,通过对点云数据在不同维度上的投影统计和非极大值抑制,实现对噪声点云、地面点云和障碍物点云的准确分割;通过地面重定位有效的抑制场地轮胎式龙门起重机运行时的晃动对检测精度和鲁棒性的影响,有效提高障碍物的检测精度和障碍物的检测距离;通过对相机姿态学习和点云的个数和高度的检测实时监测避障系统的异常,对提高港口自动化和港口安全生产有重要意义。

基于双目视觉的服务机器人避障方法研究的开题报告.docx
基于双目视觉的服务机器人避障方法研究的开题报告一、研究背景随着服务机器人在日常生活中的广泛应用,其避障能力成为了必要的功能之一。而基于单目视觉的避障方法因为难以获取深度信息,其准确度不尽人意,因此双目视觉的避障方法成为了一个备受关注的研究方向。双目视觉是指通过两个摄像头获取场景的深度信息,从而实现三维视觉的过程。利用双目视觉的深度信息,可以对机器人周围的障碍物进行准确的探测和避障,提高了机器人在复杂环境下的自主导航能力。二、研究意义双目视觉的避障方法具有以下优点:1.可以获取精确的深度信息,提高了避障的准

一种基于视觉SLAM的盲人避障导航系统.pdf
本发明公开了一种基于视觉SLAM的盲人避障导航系统,包括数据收集模块、避障导航模块和场景重现模块;数据收集模块包括两个RGBD传感器和一块开发板,两个RGBD传感器用于采集前方和下方的图像信息与距离信息;避障导航模块包括局部规划器、全局规划器和震动装置,在每个时刻会获取数据收集模块中当前时刻的局部障碍物地图,该地图被传送至局部规划器、全局规划器;场景重现模块包括接收器和耳机,最后将物品信息输出至耳机。本发明通过触觉、听觉多感官的提示增强导盲装置的便捷性和功能性,同时提高预报的准确度以及速度。