
基于双目视觉的无人机避障系统设计.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于双目视觉的无人机避障系统设计.docx
基于双目视觉的无人机避障系统设计【摘要】随着无人机的广泛应用,无人机避障系统的研究也越来越受到关注。本论文提出了一种基于双目视觉的无人机避障系统设计方案。该系统利用双目视觉技术获取环境信息,并通过算法分析和处理信息,实现无人机的自主避障功能。通过实验验证,结果表明该系统具有较高的避障准确性和实时性。【关键词】无人机;双目视觉;避障系统;自主避障;准确性;实时性1.引言随着无人机的广泛应用,无人机的避障能力成为其安全飞行和适应多样化任务环境的关键。传统的无人机避障系统通常利用雷达、激光等传感器获取环境信息,

基于双目视觉的室内避障无人机设计与实现.docx
基于双目视觉的室内避障无人机设计与实现标题:基于双目视觉的室内避障无人机设计与实现摘要:室内避障是无人机技术中的一个重要挑战,而双目视觉技术已经被广泛应用于室内目标检测和跟踪中。本论文根据基于双目视觉的室内避障无人机设计与实现进行了详细研究。首先,介绍了当前室内避障无人机的发展和存在的问题。然后,提出了基于双目视觉的室内避障无人机设计方案,并详细描述了实施该方案的步骤。最后,进行了实验验证和结果分析,证明了该系统的有效性和可行性。关键词:室内避障,无人机,双目视觉,设计,实现引言:随着无人机技术的快速发展

基于双目全景视觉的无人机避障技术探究.docx
基于双目全景视觉的无人机避障技术探究摘要:基于双目全景视觉的无人机避障技术是一种新型的避障技术,其主要原理是通过双目摄像头实时采集周围环境的景象,对景象进行深度学习和图像识别,从而在无人机飞行时实现避障。本文旨在探索基于双目全景视觉的无人机避碍技术,主要从技术原理、系统架构、算法优化和未来发展趋势等方面进行探讨。关键词:双目全景视觉,无人机,避碍技术。1.引言无人机的应用已经越来越广泛,所以无人机的避障技术也变得越来越重要。传统的无人机避障技术基本上是通过应用雷达、超声波、光电等传感器来实现的,但这些传感
基于双目视觉与光流融合的无人机避障方法及系统.pdf
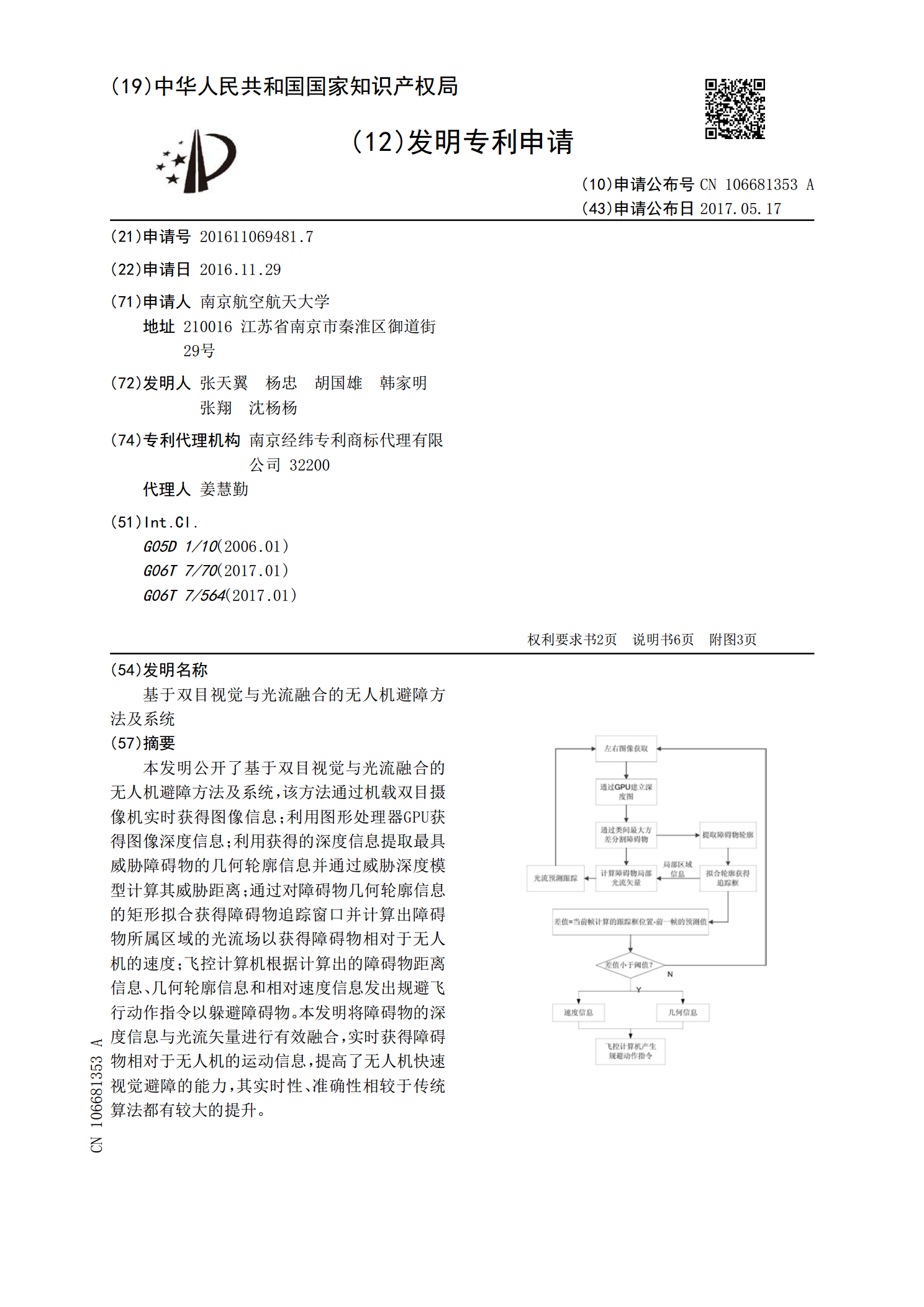
本发明公开了基于双目视觉与光流融合的无人机避障方法及系统,该方法通过机载双目摄像机实时获得图像信息;利用图形处理器GPU获得图像深度信息;利用获得的深度信息提取最具威胁障碍物的几何轮廓信息并通过威胁深度模型计算其威胁距离;通过对障碍物几何轮廓信息的矩形拟合获得障碍物追踪窗口并计算出障碍物所属区域的光流场以获得障碍物相对于无人机的速度;飞控计算机根据计算出的障碍物距离信息、几何轮廓信息和相对速度信息发出规避飞行动作指令以躲避障碍物。本发明将障碍物的深度信息与光流矢量进行有效融合,实时获得障碍物相对于无人机的
一种基于双目视觉系统的无人机避障方法.pdf
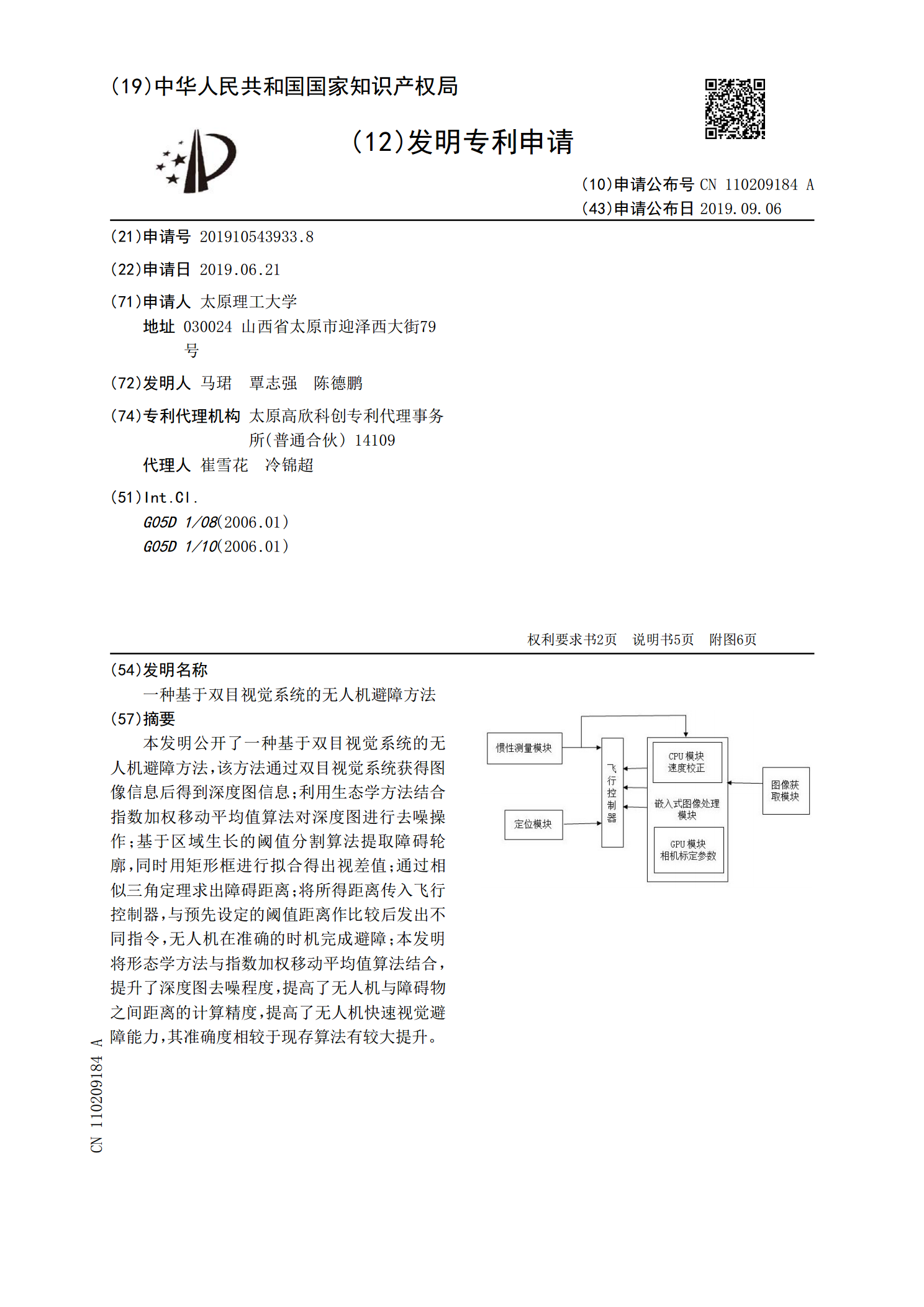
本发明公开了一种基于双目视觉系统的无人机避障方法,该方法通过双目视觉系统获得图像信息后得到深度图信息;利用生态学方法结合指数加权移动平均值算法对深度图进行去噪操作;基于区域生长的阈值分割算法提取障碍轮廓,同时用矩形框进行拟合得出视差值;通过相似三角定理求出障碍距离;将所得距离传入飞行控制器,与预先设定的阈值距离作比较后发出不同指令,无人机在准确的时机完成避障;本发明将形态学方法与指数加权移动平均值算法结合,提升了深度图去噪程度,提高了无人机与障碍物之间距离的计算精度,提高了无人机快速视觉避障能力,其准确度