
基于双目视觉的室内避障无人机设计与实现.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于双目视觉的室内避障无人机设计与实现.docx
基于双目视觉的室内避障无人机设计与实现标题:基于双目视觉的室内避障无人机设计与实现摘要:室内避障是无人机技术中的一个重要挑战,而双目视觉技术已经被广泛应用于室内目标检测和跟踪中。本论文根据基于双目视觉的室内避障无人机设计与实现进行了详细研究。首先,介绍了当前室内避障无人机的发展和存在的问题。然后,提出了基于双目视觉的室内避障无人机设计方案,并详细描述了实施该方案的步骤。最后,进行了实验验证和结果分析,证明了该系统的有效性和可行性。关键词:室内避障,无人机,双目视觉,设计,实现引言:随着无人机技术的快速发展

基于双目视觉的无人机避障系统设计.docx
基于双目视觉的无人机避障系统设计【摘要】随着无人机的广泛应用,无人机避障系统的研究也越来越受到关注。本论文提出了一种基于双目视觉的无人机避障系统设计方案。该系统利用双目视觉技术获取环境信息,并通过算法分析和处理信息,实现无人机的自主避障功能。通过实验验证,结果表明该系统具有较高的避障准确性和实时性。【关键词】无人机;双目视觉;避障系统;自主避障;准确性;实时性1.引言随着无人机的广泛应用,无人机的避障能力成为其安全飞行和适应多样化任务环境的关键。传统的无人机避障系统通常利用雷达、激光等传感器获取环境信息,

基于双目全景视觉的无人机避障技术探究.docx
基于双目全景视觉的无人机避障技术探究摘要:基于双目全景视觉的无人机避障技术是一种新型的避障技术,其主要原理是通过双目摄像头实时采集周围环境的景象,对景象进行深度学习和图像识别,从而在无人机飞行时实现避障。本文旨在探索基于双目全景视觉的无人机避碍技术,主要从技术原理、系统架构、算法优化和未来发展趋势等方面进行探讨。关键词:双目全景视觉,无人机,避碍技术。1.引言无人机的应用已经越来越广泛,所以无人机的避障技术也变得越来越重要。传统的无人机避障技术基本上是通过应用雷达、超声波、光电等传感器来实现的,但这些传感

基于YOLOV3的双目视觉无人机避障方法.pdf
本发明属于视觉避障领域,具体涉及一种基于YOLOV3的无人机双目视觉避障方法,利用YOLOV3深度学习网络实现障碍物目标识别与区域提取问题,通过SURF匹配算法对障碍物目标的特征点进行特征匹配,根据最小二乘法对障碍物位置的三维还原,解决视觉测距与防撞问题,从而根据双目视觉与深度学习网络针对障碍物位置坐标的提供,通过扩展到三维的ArtificalPotentialField(APF)算法获取精确的避障路线。适合中小型无人机的智能化、微型化及低成本的特点,具有理论与实用价值。
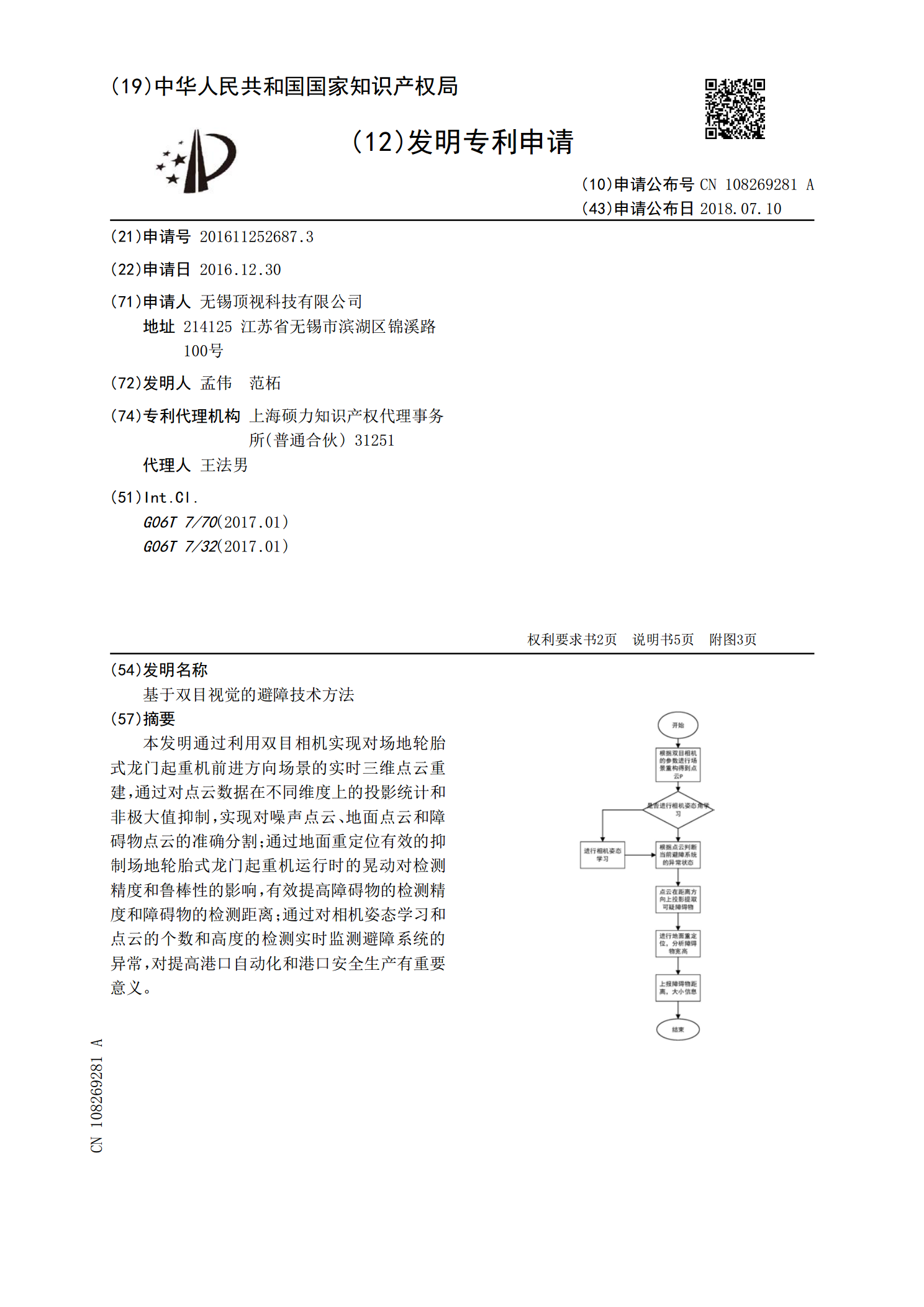
基于双目视觉的避障技术方法.pdf
本发明通过利用双目相机实现对场地轮胎式龙门起重机前进方向场景的实时三维点云重建,通过对点云数据在不同维度上的投影统计和非极大值抑制,实现对噪声点云、地面点云和障碍物点云的准确分割;通过地面重定位有效的抑制场地轮胎式龙门起重机运行时的晃动对检测精度和鲁棒性的影响,有效提高障碍物的检测精度和障碍物的检测距离;通过对相机姿态学习和点云的个数和高度的检测实时监测避障系统的异常,对提高港口自动化和港口安全生产有重要意义。