
一种基于双目视觉系统的无人机避障方法.pdf

慧颖****23

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于双目视觉系统的无人机避障方法.pdf
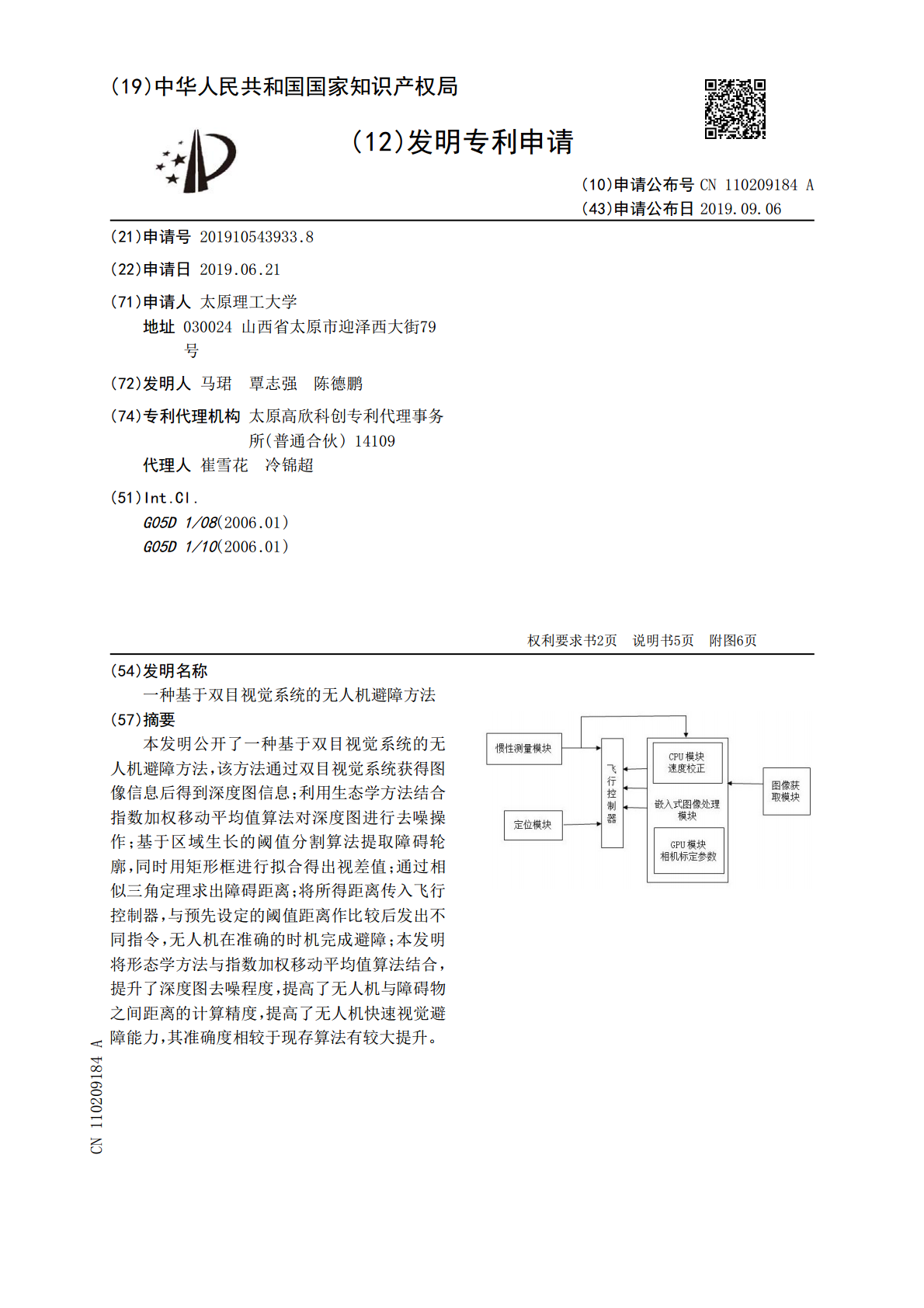
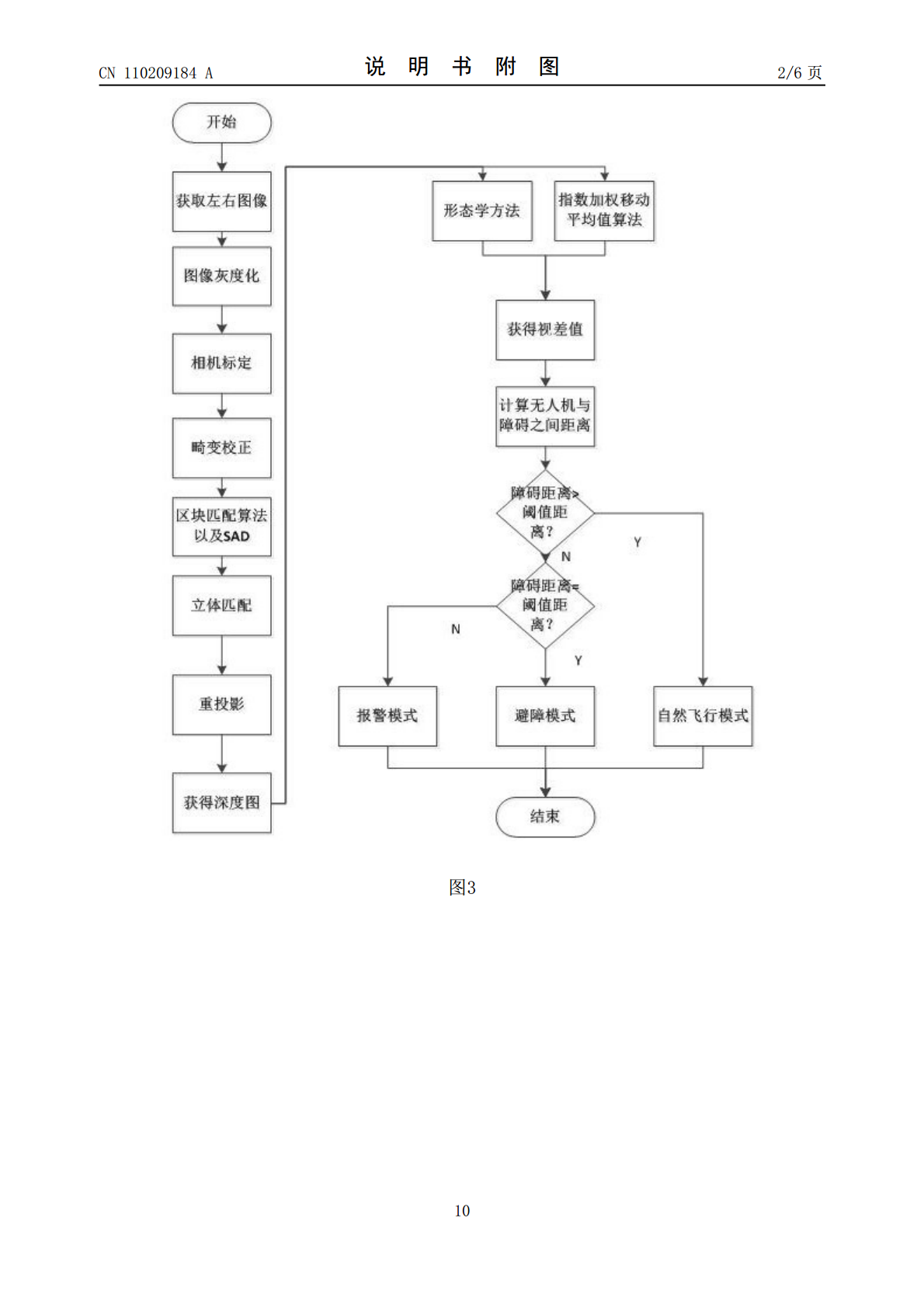
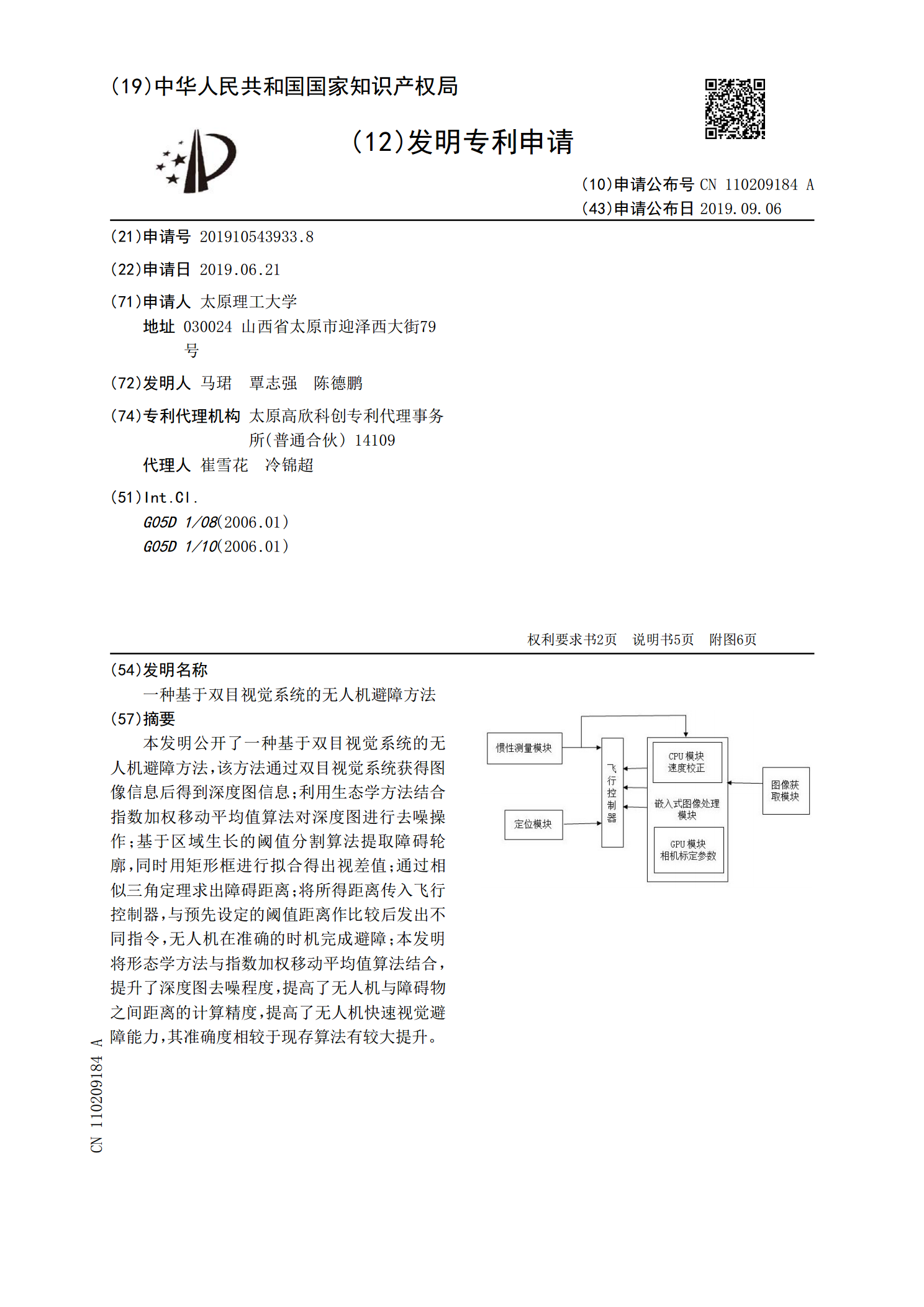
本发明公开了一种基于双目视觉系统的无人机避障方法,该方法通过双目视觉系统获得图像信息后得到深度图信息;利用生态学方法结合指数加权移动平均值算法对深度图进行去噪操作;基于区域生长的阈值分割算法提取障碍轮廓,同时用矩形框进行拟合得出视差值;通过相似三角定理求出障碍距离;将所得距离传入飞行控制器,与预先设定的阈值距离作比较后发出不同指令,无人机在准确的时机完成避障;本发明将形态学方法与指数加权移动平均值算法结合,提升了深度图去噪程度,提高了无人机与障碍物之间距离的计算精度,提高了无人机快速视觉避障能力,其准确度

基于YOLOV3的双目视觉无人机避障方法.pdf
本发明属于视觉避障领域,具体涉及一种基于YOLOV3的无人机双目视觉避障方法,利用YOLOV3深度学习网络实现障碍物目标识别与区域提取问题,通过SURF匹配算法对障碍物目标的特征点进行特征匹配,根据最小二乘法对障碍物位置的三维还原,解决视觉测距与防撞问题,从而根据双目视觉与深度学习网络针对障碍物位置坐标的提供,通过扩展到三维的ArtificalPotentialField(APF)算法获取精确的避障路线。适合中小型无人机的智能化、微型化及低成本的特点,具有理论与实用价值。
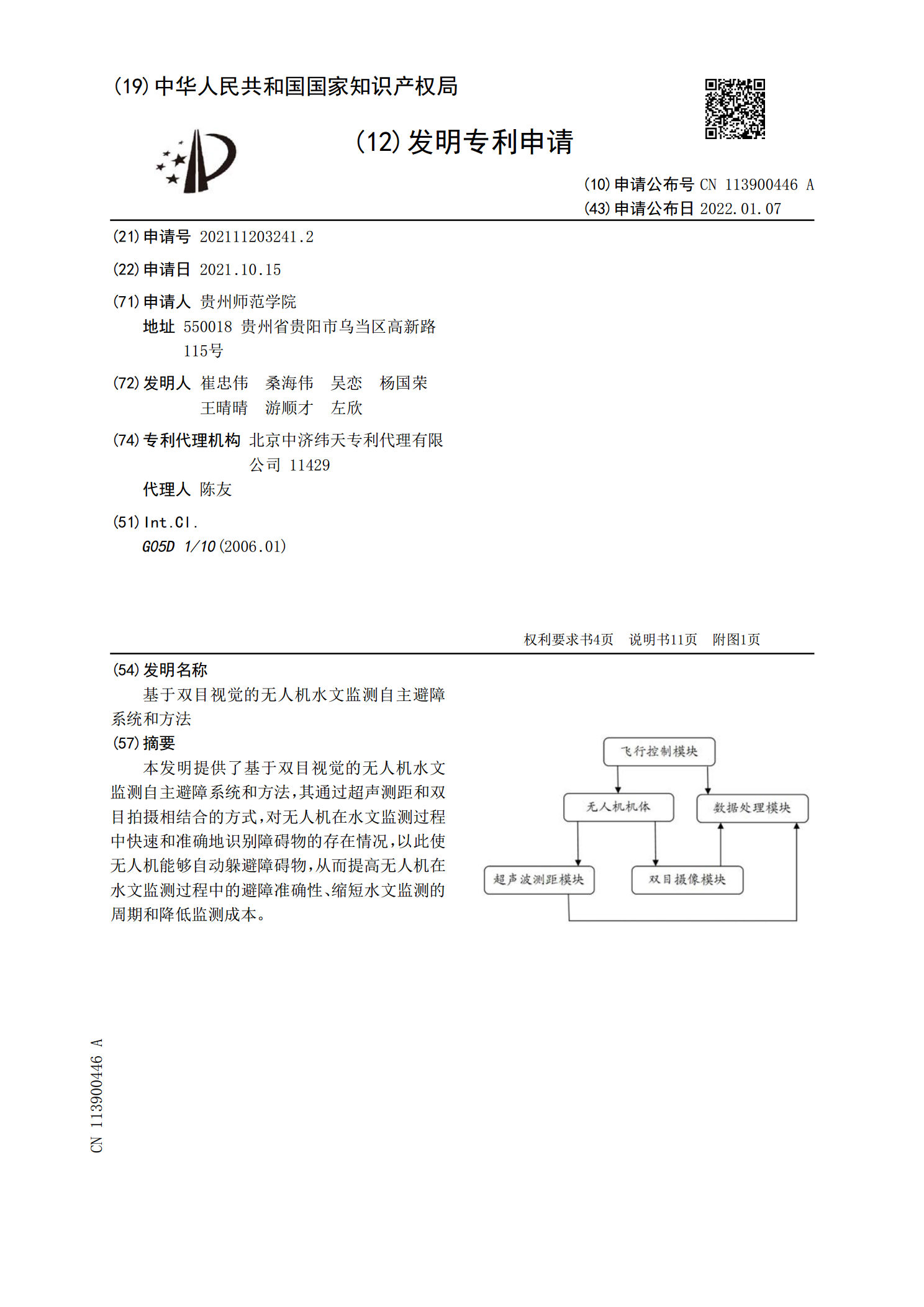
基于双目视觉的无人机水文监测自主避障系统和方法.pdf
本发明提供了基于双目视觉的无人机水文监测自主避障系统和方法,其通过超声测距和双目拍摄相结合的方式,对无人机在水文监测过程中快速和准确地识别障碍物的存在情况,以此使无人机能够自动躲避障碍物,从而提高无人机在水文监测过程中的避障准确性、缩短水文监测的周期和降低监测成本。
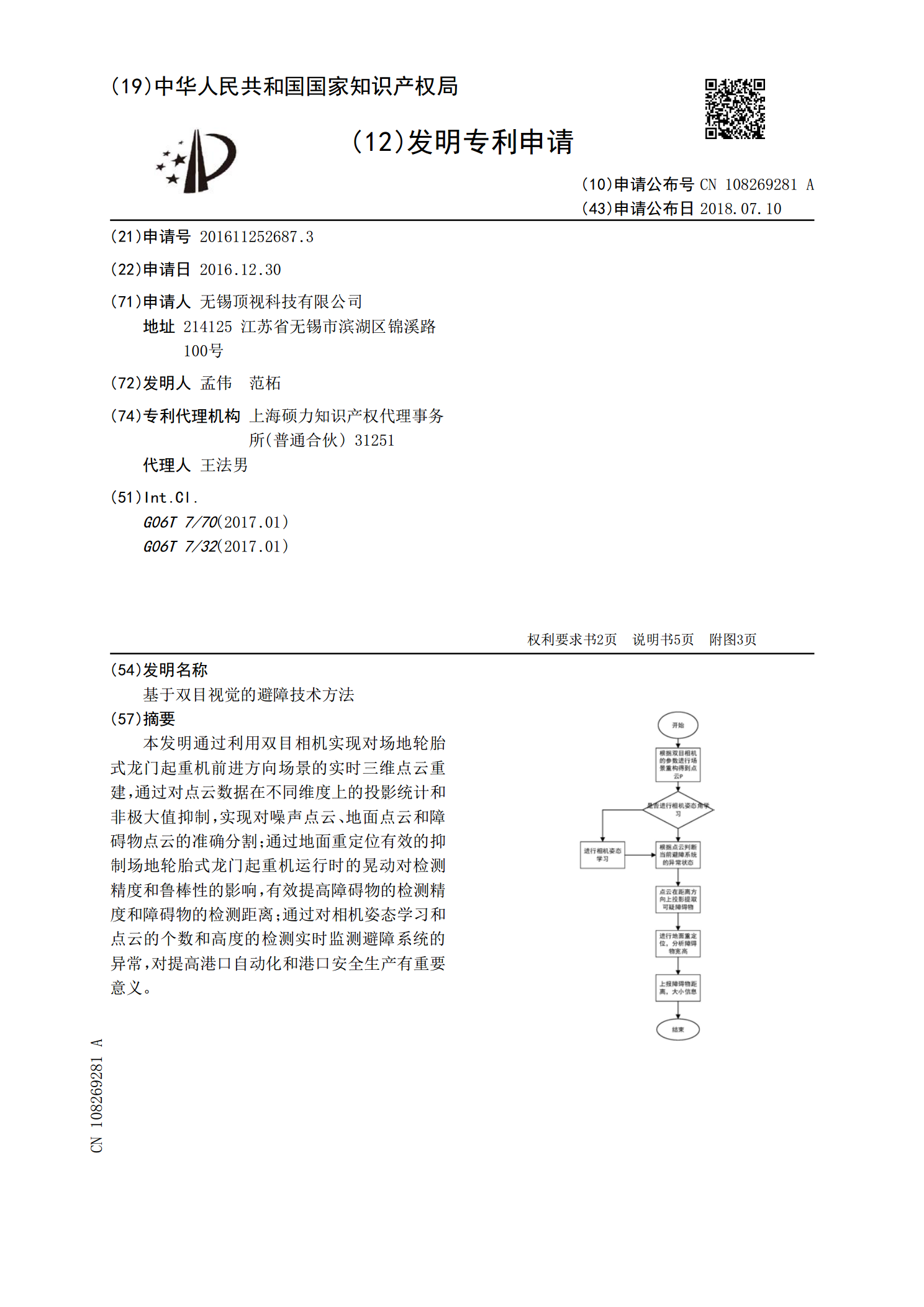
基于双目视觉的避障技术方法.pdf
本发明通过利用双目相机实现对场地轮胎式龙门起重机前进方向场景的实时三维点云重建,通过对点云数据在不同维度上的投影统计和非极大值抑制,实现对噪声点云、地面点云和障碍物点云的准确分割;通过地面重定位有效的抑制场地轮胎式龙门起重机运行时的晃动对检测精度和鲁棒性的影响,有效提高障碍物的检测精度和障碍物的检测距离;通过对相机姿态学习和点云的个数和高度的检测实时监测避障系统的异常,对提高港口自动化和港口安全生产有重要意义。
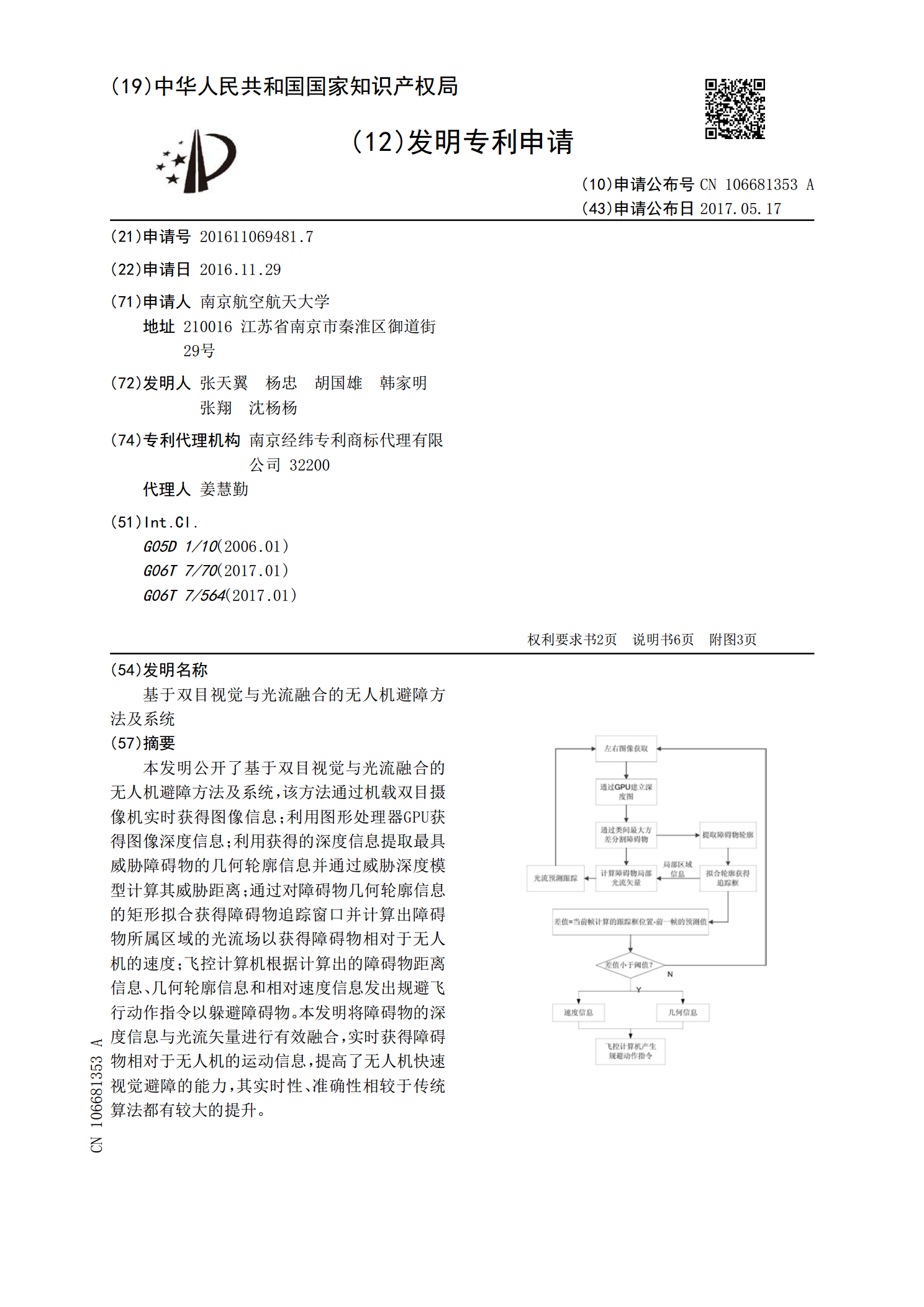
基于双目视觉与光流融合的无人机避障方法及系统.pdf
本发明公开了基于双目视觉与光流融合的无人机避障方法及系统,该方法通过机载双目摄像机实时获得图像信息;利用图形处理器GPU获得图像深度信息;利用获得的深度信息提取最具威胁障碍物的几何轮廓信息并通过威胁深度模型计算其威胁距离;通过对障碍物几何轮廓信息的矩形拟合获得障碍物追踪窗口并计算出障碍物所属区域的光流场以获得障碍物相对于无人机的速度;飞控计算机根据计算出的障碍物距离信息、几何轮廓信息和相对速度信息发出规避飞行动作指令以躲避障碍物。本发明将障碍物的深度信息与光流矢量进行有效融合,实时获得障碍物相对于无人机的