
基于双目视觉的避障技术方法.pdf

是你****芹呀

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于双目视觉的避障技术方法.pdf
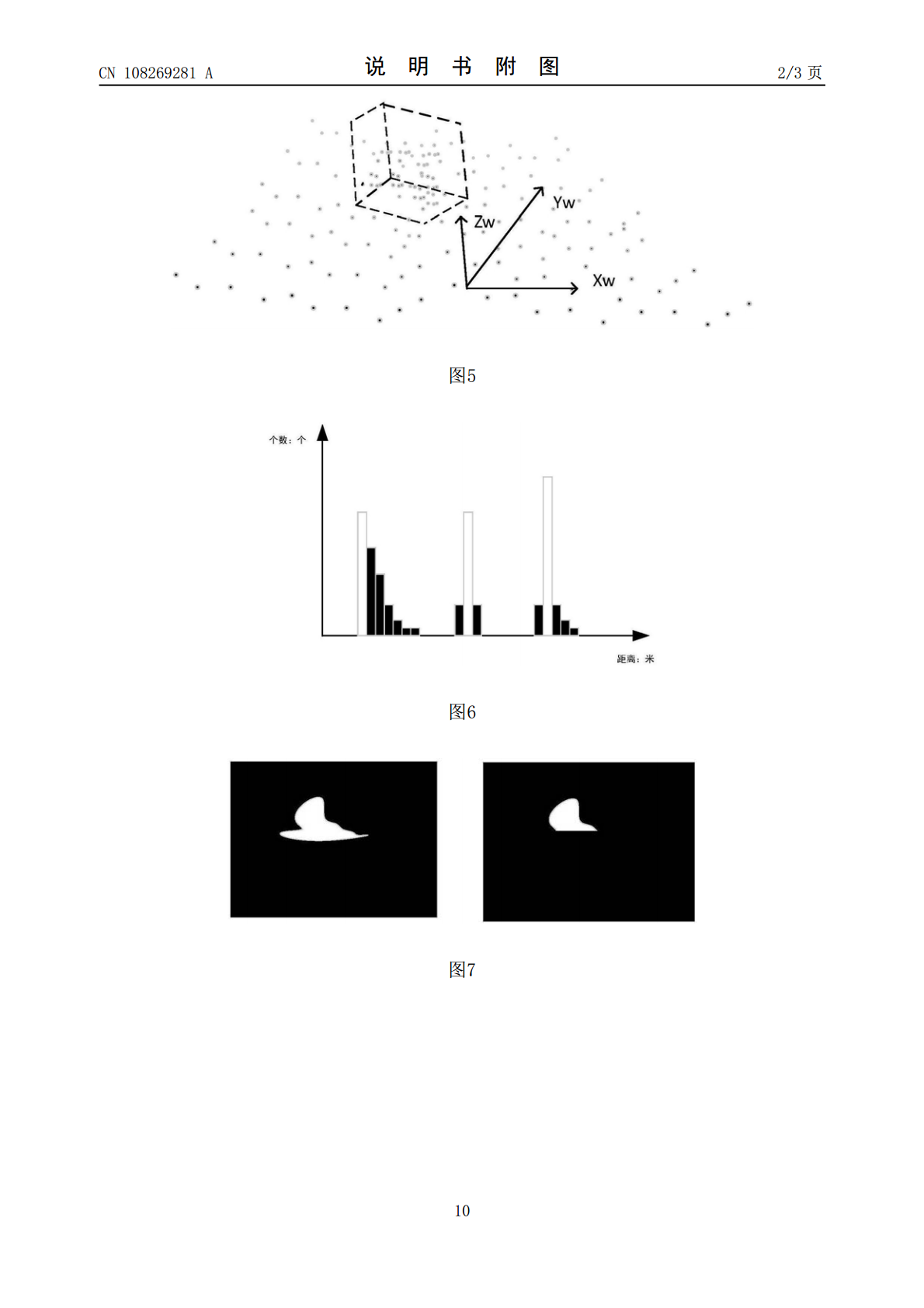
本发明通过利用双目相机实现对场地轮胎式龙门起重机前进方向场景的实时三维点云重建,通过对点云数据在不同维度上的投影统计和非极大值抑制,实现对噪声点云、地面点云和障碍物点云的准确分割;通过地面重定位有效的抑制场地轮胎式龙门起重机运行时的晃动对检测精度和鲁棒性的影响,有效提高障碍物的检测精度和障碍物的检测距离;通过对相机姿态学习和点云的个数和高度的检测实时监测避障系统的异常,对提高港口自动化和港口安全生产有重要意义。

基于双目视觉的智能小车避障方法研究.docx
基于双目视觉的智能小车避障方法研究目录一、内容描述................................................21.研究背景与意义........................................32.国内外研究现状........................................43.研究内容与方法........................................5二、双目视觉系统原理及关键技术................

基于双目立体视觉技术的无人船避障研究.docx
基于双目立体视觉技术的无人船避障研究基于双目立体视觉技术的无人船避障研究摘要:无人船作为一种具有广泛应用前景的无人自动驾驶航行器,受到了越来越多的关注。然而,在实际航行过程中,无人船常常面临避障问题。本文通过采用双目立体视觉技术,实现无人船的避障功能。通过对无人船的外部环境进行感知和分析,通过双目立体视觉技术获取深度信息,从而能够及时准确地判断障碍物的位置和形状,进而做出相应的避障策略。实验结果表明,基于双目立体视觉技术的无人船避障系统能够有效地提高无人船的安全性和良好的航行性能。关键词:双目立体视觉、无

基于双目全景视觉的无人机避障技术探究.docx
基于双目全景视觉的无人机避障技术探究摘要:基于双目全景视觉的无人机避障技术是一种新型的避障技术,其主要原理是通过双目摄像头实时采集周围环境的景象,对景象进行深度学习和图像识别,从而在无人机飞行时实现避障。本文旨在探索基于双目全景视觉的无人机避碍技术,主要从技术原理、系统架构、算法优化和未来发展趋势等方面进行探讨。关键词:双目全景视觉,无人机,避碍技术。1.引言无人机的应用已经越来越广泛,所以无人机的避障技术也变得越来越重要。传统的无人机避障技术基本上是通过应用雷达、超声波、光电等传感器来实现的,但这些传感
基于双目视觉的自主避障型无人船.pdf
本发明公开了基于双目视觉的自主避障型无人船,涉及无人船技术领域,包括无人船主体,所述无人船主体的上表面两侧对称安装有安装杆,且安装杆的一侧面上端滑动安装有滑动安装杆,所述滑动安装杆的一端固定安装有挡板,所述滑动安装杆的另一端固定安装有清洁板,所述无人船主体的上表面位于安装杆的一侧均固定安装有第一支撑杆,且第一支撑杆的上端固定安装有第三电机,所述第三电机的输出端固定安装有安装护罩,且安装护罩的外表面中部安装有视觉监测防护板,所述安装护罩的内部开设有第二内腔,且第二内腔的底端中部安装有第二支撑杆。当视觉监测防