
基于PLC的深海ROV光电复合缆绞车控制系统设计研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于PLC的深海ROV光电复合缆绞车控制系统设计研究.docx
基于PLC的深海ROV光电复合缆绞车控制系统设计研究摘要:本文以深海ROV光电复合缆绞车控制系统为研究对象,基于PLC技术和先进的控制算法,设计出了一套高效稳定的控制系统。本文重点介绍了系统的硬件和软件结构,详细阐述了绞车运动控制的实现过程及其关键技术。经过实际测试,本系统可以实现高速稳定的光电复合缆绞车控制,满足深海作业任务要求。关键词:深海ROV、光电复合缆、绞车控制、PLC技术、控制算法引言:随着科学技术的发展,深海资源开发已成为当今的热点领域之一。在深海作业中,ROV(遥控操作车)光电复合缆绞车是

深海ROV铠缆绞车及主动升沉补偿装置设计研究的任务书.docx
深海ROV铠缆绞车及主动升沉补偿装置设计研究的任务书任务书一、任务背景深海ROV(远程遥控器)在海洋资源开发、科学研究和军事用途等方面发挥着重要作用。它能够在深海环境下承担各种复杂的任务,如进行深海物种采集、海洋地质采样、海底管道维护等。而深海ROV作业所需的铠缆绞车和主动升沉补偿装置是保证ROV正常运行的重要部件,其设计好坏直接关系到ROV的使用效率和安全性。目前国内对于深海ROV铠缆绞车和主动升沉补偿装置的研究相对薄弱,需要加强技术研究和设计。因此,本项目旨在开展深海ROV铠缆绞车及主动升沉补偿装置的
ROV用水下铺缆绞车.pdf
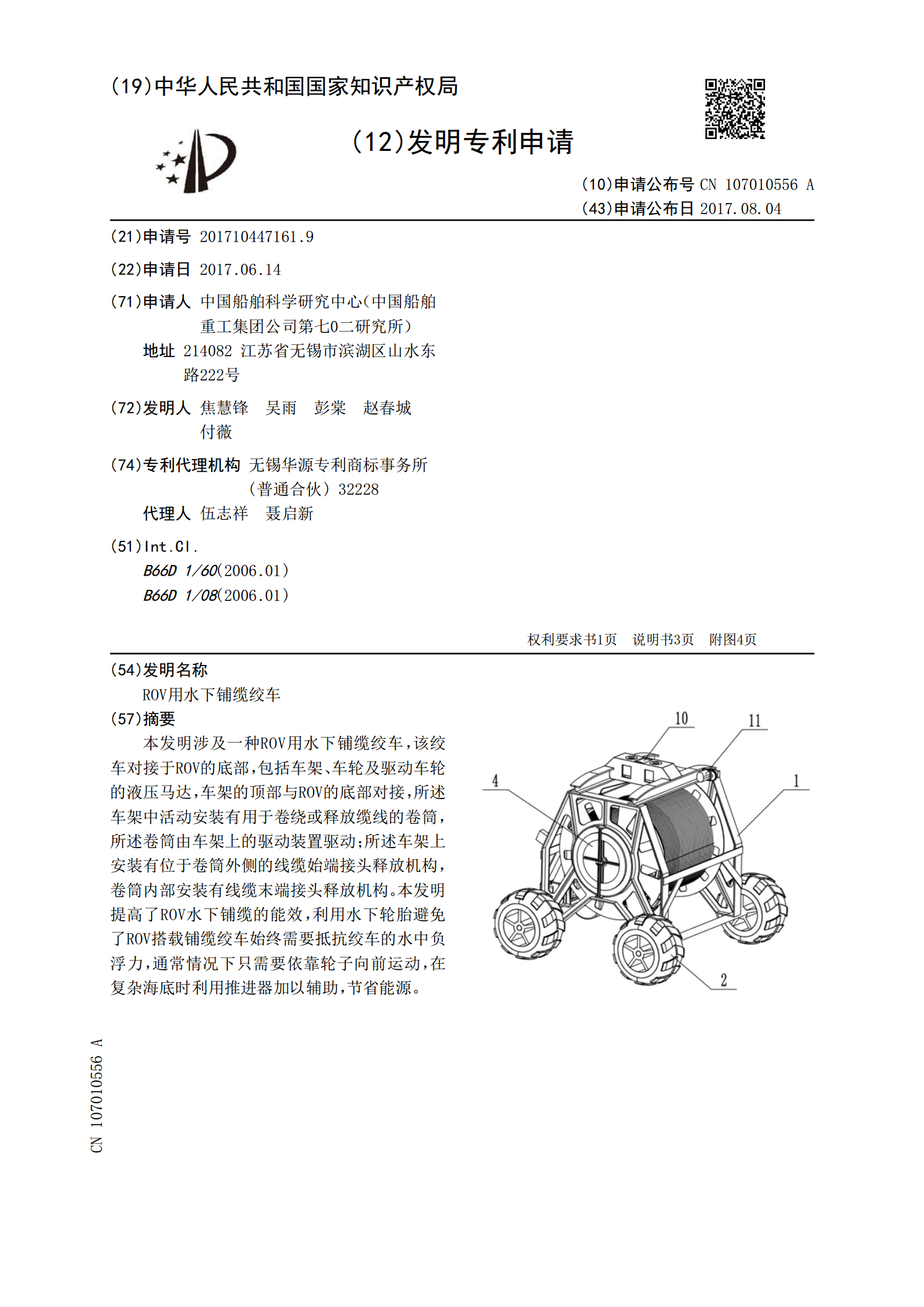
本发明涉及一种ROV用水下铺缆绞车,该绞车对接于ROV的底部,包括车架、车轮及驱动车轮的液压马达,车架的顶部与ROV的底部对接,所述车架中活动安装有用于卷绕或释放缆线的卷筒,所述卷筒由车架上的驱动装置驱动;所述车架上安装有位于卷筒外侧的线缆始端接头释放机构,卷筒内部安装有线缆末端接头释放机构。本发明提高了ROV水下铺缆的能效,利用水下轮胎避免了ROV搭载铺缆绞车始终需要抵抗绞车的水中负浮力,通常情况下只需要依靠轮子向前运动,在复杂海底时利用推进器加以辅助,节省能源。

深海绞车回收ROV速度的仿真分析.docx
深海绞车回收ROV速度的仿真分析标题:深海绞车回收ROV速度的仿真分析摘要:随着海洋工程领域的不断发展,深海绞车作为一种关键设备,在深海勘探、救援等领域起着重要作用。本文基于深海绞车回收远程操作机器人(ROV)的实际需求,通过仿真分析深海绞车对ROV速度的影响。通过理论计算以及模拟仿真,得出深海绞车的速度参数对ROV回收效率的影响规律,提供了对深海绞车回收ROV速度优化的理论参考。引言:深海绞车回收ROV是一项重要的深海工程任务,这种设备广泛应用于海洋油田勘探、海底资源开发以及深海科学研究等领域。ROV的

基于PLC的主缆紧缆机智能控制系统设计.docx
基于PLC的主缆紧缆机智能控制系统设计随着现代工业自动化的发展,控制系统越来越重要,特别是在大型工厂中,如造船厂、石油化工厂等。主缆紧缆机在这些工厂中扮演着很重要的角色。本文就基于PLC的主缆紧缆机智能控制系统的设计进行探讨。一、主缆紧缆机的主要控制系统传统的主缆紧缆机控制系统通常包括电机控制系统、张力控制系统和长度控制系统。钢丝绳与芯轴系统也是重要的控制系统之一。电机控制系统控制主缆紧缆机的电机启动、停止和转速调节。主缆紧缆机需要轮廓恒速运行,而且停机时,需要急停。张力控制系统调节绳索的张力,以确保主缆