
深海ROV铠缆绞车及主动升沉补偿装置设计研究的任务书.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

深海ROV铠缆绞车及主动升沉补偿装置设计研究的任务书.docx
深海ROV铠缆绞车及主动升沉补偿装置设计研究的任务书任务书一、任务背景深海ROV(远程遥控器)在海洋资源开发、科学研究和军事用途等方面发挥着重要作用。它能够在深海环境下承担各种复杂的任务,如进行深海物种采集、海洋地质采样、海底管道维护等。而深海ROV作业所需的铠缆绞车和主动升沉补偿装置是保证ROV正常运行的重要部件,其设计好坏直接关系到ROV的使用效率和安全性。目前国内对于深海ROV铠缆绞车和主动升沉补偿装置的研究相对薄弱,需要加强技术研究和设计。因此,本项目旨在开展深海ROV铠缆绞车及主动升沉补偿装置的

深海ROV铠缆系统动态特性与半主动升沉补偿技术研究.docx
深海ROV铠缆系统动态特性与半主动升沉补偿技术研究深海ROV铠缆系统动态特性与半主动升沉补偿技术研究摘要:深海ROV铠缆系统是进行深海探测和采样的重要设备,然而其一直存在的问题是铠缆系统自身质量较大,容易受到海水流动和海底地形的影响导致摆荡、漂移等问题,极大的限制了其在深海环境下的工作效率。因此,对深海ROV铠缆系统动态特性和半主动升沉补偿技术进行研究,具有重要意义。关键词:深海ROV铠缆系统、动态特性、半主动升沉补偿技术一、引言深海是地球上最神秘的地方之一,深海环境十分恶劣,要在深海环境中进行探测和采样

深海ROV铠缆系统动态特性与半主动升沉补偿技术研究的任务书.docx
深海ROV铠缆系统动态特性与半主动升沉补偿技术研究的任务书任务书一、任务背景随着深海勘探和开发的不断深入,深海ROV(遥控操作车)在海底勘探、开发和服务领域中扮演着越来越重要的角色。而ROV需要使用铠装电缆进行遥控信号和电源传输,同时需要在海底复杂环境中进行运动控制。因此,ROV铠缆系统的稳定性、鲁棒性和动态特性是一项极其重要的问题。目前,ROV铠缆系统所面临的挑战主要包括:1.沉着深海中运动的铠缆在海水中会受到复杂的流体动力学力影响,容易产生高粘度的阻力和滞缓效应。2.深海ROV的操作深度深,气压变化大

基于PLC的深海ROV光电复合缆绞车控制系统设计研究.docx
基于PLC的深海ROV光电复合缆绞车控制系统设计研究摘要:本文以深海ROV光电复合缆绞车控制系统为研究对象,基于PLC技术和先进的控制算法,设计出了一套高效稳定的控制系统。本文重点介绍了系统的硬件和软件结构,详细阐述了绞车运动控制的实现过程及其关键技术。经过实际测试,本系统可以实现高速稳定的光电复合缆绞车控制,满足深海作业任务要求。关键词:深海ROV、光电复合缆、绞车控制、PLC技术、控制算法引言:随着科学技术的发展,深海资源开发已成为当今的热点领域之一。在深海作业中,ROV(遥控操作车)光电复合缆绞车是
ROV用水下铺缆绞车.pdf
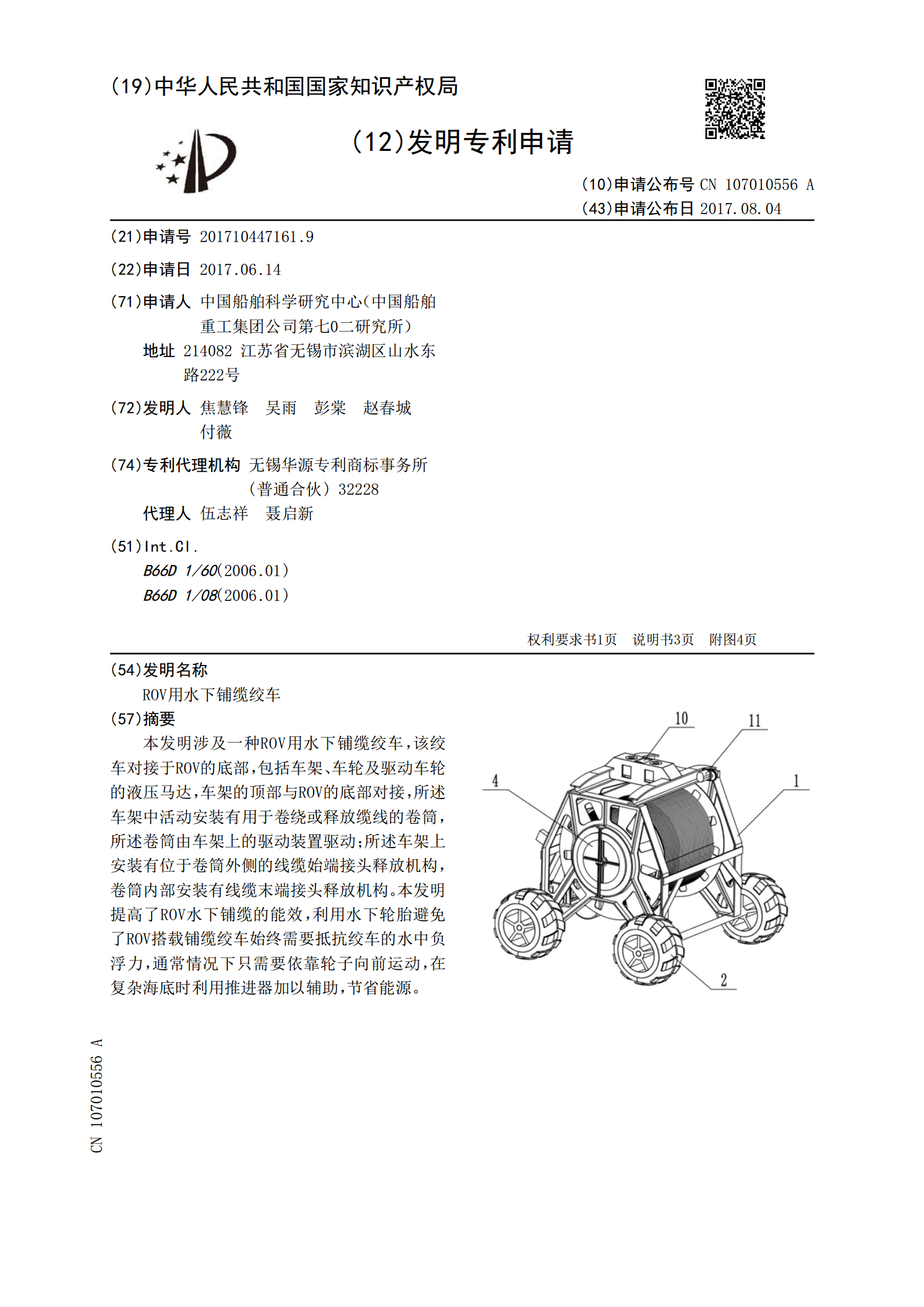
本发明涉及一种ROV用水下铺缆绞车,该绞车对接于ROV的底部,包括车架、车轮及驱动车轮的液压马达,车架的顶部与ROV的底部对接,所述车架中活动安装有用于卷绕或释放缆线的卷筒,所述卷筒由车架上的驱动装置驱动;所述车架上安装有位于卷筒外侧的线缆始端接头释放机构,卷筒内部安装有线缆末端接头释放机构。本发明提高了ROV水下铺缆的能效,利用水下轮胎避免了ROV搭载铺缆绞车始终需要抵抗绞车的水中负浮力,通常情况下只需要依靠轮子向前运动,在复杂海底时利用推进器加以辅助,节省能源。