
理论力学虚位移原理ppt课件.ppt

天马****23


1/10

2/10

3/10

4/10
5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共66页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
理论力学虚位移原理ppt课件.ppt
虚位移原理质点系的位形、约束方程及分类X对物体运动的限制称为约束。用数学方程表示,称为约束方程。约束的分类自由度和广义坐标X一般地,具有n个质点的系统中每一个质点用矢径表示为约束方程实位移与虚位移虚位移:在实位移概念的基础上,不考虑主动力的作用(产生位移的动力)和初始条件,仅仅满足约束条件的位移。确定系统中质点间虚位移的关系求变分各点虚位移关系,如D点虚位移与C点虚位移的关系(2)虚速度法力和功特殊力系做功的计算2、内力做功3、弹性力做功弹性恢复力做功4、约束力做功有势力做功重力势能函数:平面运动刚体上力

理论力学-虚位移原理.ppt
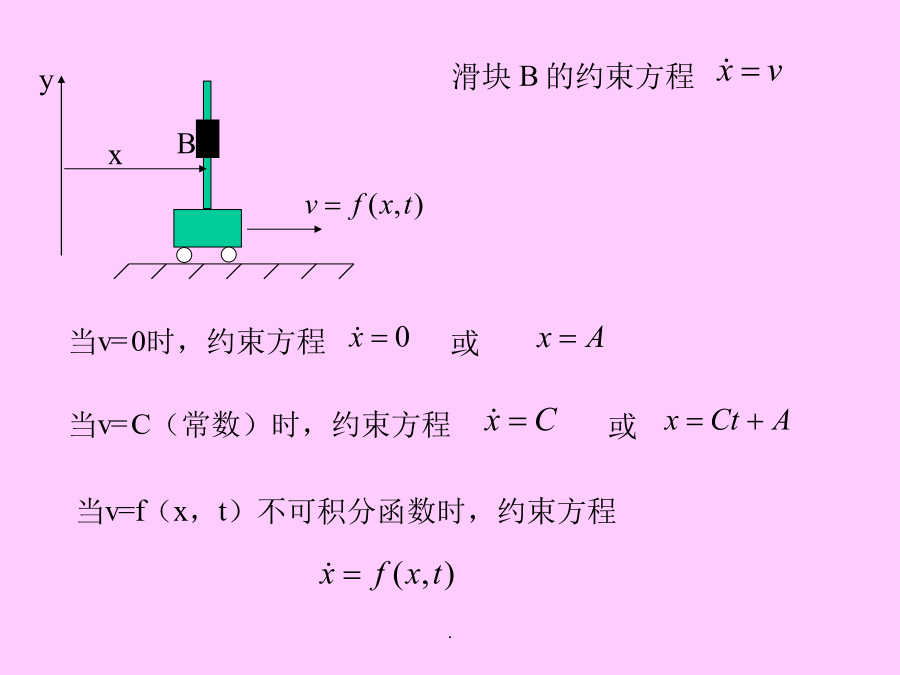
§6–4虚功·理想约束§6-1概述虚位移原理是质点系静力学的普遍原理,它将给出任意质点系平衡的充要条件,这和刚体静力学的平衡条件不同,在那里给出的刚体平衡的充要条件,对于任意质点系的平衡来说只是必要的,但并不是充分的(参阅刚化原理)。非自由质点系的平衡,可以理解为主动力通过约束的平衡。约束的作用在于:而虚位移原理则将利用后一种情况,他通过主动力在约束所许可的位移上的表现(通过功的形式)来给出质点系的平衡条件。§6-2约束和约束方程二、约束方程约束对质点系运动的限制可以通过质点系中各质点的坐标和速度以及时间

理论力学-虚位移原理.ppt
第14章虚位移原理举例:杠杆平衡问题。平衡时F1a=F2b若缓慢转过微小角度f,则s1=fa,s2=fb,由动能定理得:-F1s1+F2s2=0,即F1a=F2b和静力学平衡方程得出的结果完全一样。§14-1约束虚位移虚功举例:3.完整约束与非完整约束约束方程中包含坐标对时间的导数项,且不可积分为有限形式时为非完整约束。4.单面约束与双面约束又称为非固执(单面)约束与固执(双面)约束。约束方程为不等式形式时为单面约束。例:O2.虚位移和实位移的比较(1)大小;(2)方向(是否确定、具体);(3)与约束、时

理论力学虚位移原理专题教育课件.pptx
第十四章虚位移原理§14–1约束和约束方程§14–2自由度和广义坐标§14–3虚位移§14–4理想约束§14–5虚位移原理§14–6以广义坐标表达旳质点系旳平衡条件§14–7质点系在势力场中平衡旳稳定性导弹A追击目的B,要求导弹速度方向总指向目的。§14–1约束和约束方程§14–1约束和约束方程§14–2广义坐标和自由度§14–2广义坐标和自由度

理论力学第15讲虚位移原理.ppt
§6–4虚功·理想约束§6-1概述虚位移原理是质点系静力学的普遍原理,它将给出任意质点系平衡的充要条件,这和刚体静力学的平衡条件不同,在那里给出的刚体平衡的充要条件,对于任意质点系的平衡来说只是必要的,但并不是充分的(参阅刚化原理)。非自由质点系的平衡,可以理解为主动力通过约束的平衡。约束的作用在于:而虚位移原理则将利用后一种情况,他通过主动力在约束所许可的位移上的表现(通过功的形式)来给出质点系的平衡条件。§6-2约束和约束方程二、约束方程约束对质点系运动的限制可以通过质点系中各质点的坐标和速度以及时间